

UP_Nelineynye_sistemy_upravlenia
.pdfтуды и частоты), а затем – анализ его устойчивости. Итак, предполагаем существование колебательного периодического решения x t x t T . Тогда и
выходная величина нелинейного элемента будет периодической: y t y t T .
Записывая передаточную функцию линейной части системы в форме дробно-рациональной функции W p R p  Q p , уравнение (2.63) можно переписать как
Q p , уравнение (2.63) можно переписать как
Q p x R p x 0 . |
(2.65) |
Воспользовавшись записью уравнения порождающей системы (2.62), |
|
при условии, что малый параметр стремится к нулю, перепишем (2.65): |
|
Q p R p c x 0. |
(2.66) |
Частоту и амплитуду автоколебаний можно определить, если подобрать такой коэффициент с, что корни характеристического уравнения будут чисто мнимыми.
Далее, предполагая, что гипотеза фильтра выполнена, заметим, что можно пренебречь составляющими процесса на выходе линейной части с высшими частотами 2 , 3 … (ввиду малости для них коэффициента передачи) и считать, что на выходе линейной части системы имеется гармонический сигнал с частотой . На выходе нелинейной части системы, конечно, появятся составляющие с высшими частотами.
Однако, поскольку эти высшие гармоники не вызывают существенной реакции на выходе линейной части системы, можно не учитывать их влияние на динамику замкнутой системы. Следовательно, при исследовании замкнутой системы можно приближенно считать, что как вход, так и выход нелинейного элемента являются гармоническими колебаниями (в общем случае эти колебания могут быть несимметричными и содержать постоянную составляющую), благодаря чему и выполняется гармоническая линеаризация нелинейности.
Согласно высказанным гипотезам будем искать колебательное решение
в виде гармонической функции |
|
x t asin t |
(2.67) |
и попытаемся подобрать величины a (амплитуда) и (частота) так, чтобы уравнения (2.63) и (2.64) удовлетворялись тождественно. Тогда выходной процесс будет также периодическим, его разложение в ряд Фурье будет иметь вид:
41

y t x t a sin t a0 ak sin k t bk cos k t .
k 1
Согласно принятой гипотезе можно ограничиться только слагаемыми с частотой не выше частоты основной гармоники, т. е. принять
y t a0 a1 sin t b1 cos t ,
где коэффициенты разложения Фурье определяются по следующим выражениям
|
|
|
|
|
1 |
2 |
|
||
a0 |
a sin d , |
(2.68) |
|||||||
|
2 |
||||||||
|
|
|
|
|
|
0 |
|
||
|
|
1 |
|
2 |
|
|
|||
a1 |
|
|
a sin sin d , |
(2.69) |
|||||
|
|
|
|||||||
|
|
0 |
|
|
|||||
|
1 |
|
|
2 |
|
|
|||
b1 |
|
|
|
a sin cos d , |
(2.70) |
||||
|
|
||||||||
|
0 |
|
|
||||||
где t . Здесь стоит отметить, что коэффициенты a0 , a1 и b1 зависят только от вида нелинейной функции и амплитуды.
Исследование выражений (2.68)–(2.70) показывает, что для однозначных симметричных нелинейных характеристик (т. е. в случае, когда выходной процесс заданного звена тоже есть гармоника частоты , совпадающая по фазе с входным процессом, но имеющая амплитуду a1 ) справедливо следующее:
y t a1 sin t , |
(2.71) |
где a1 определяется согласно (2.69). Из (2.67) можно |
получить |
sin t x t  a . Подставляя это выражение в (2.71), получим
a . Подставляя это выражение в (2.71), получим
y t a1sin t aa1 x t q a x t ,
где q a a1 a – коэффициент гармонической линеаризации. Таким образом,
a – коэффициент гармонической линеаризации. Таким образом,
при сделанных предположениях рассматриваемое звено ведет себя как линейное безынерционное звено y t q a x t с коэффициентом передачи
q a . Такое звено можно описать передаточной функцией |
|
Wн p q a . |
(2.72) |
Тогда в установившемся колебательном режиме можно перейти от нелинейной системы к линейной.
Для неоднозначных симметричных нелинейных характеристик (в этом случае происходит фазовый сдвиг)
42

y t a1 sin t b1 cos t , |
(2.73) |
где a1 и b1 определяются согласно (2.69) и (2.70) соответственно. Дифференцируя выражение для x t по времени, получим выражение для cos t через
x t : cos t x t a . Подставляя его в (2.73), с учетом |
sin t x t a |
|||||||
получим |
|
|
|
|
|
|
|
|
|
y t |
a1 |
x t |
b1 |
x t q a x t |
b a |
x t , |
(2.74) |
|
|
a |
|
|||||
|
|
a |
|
|
|
|||
где q a a1 a |
и b a b1 a |
называются коэффициентами гармонической |
||||||
линеаризации нелинейных звеньев. Полученному выражению соответствует передаточная функция звена форсирующего типа
Wн p q a b a p .
С учетом (2.69) и (2.70) для коэффициентов гармонической линеаризации можно получить следующие выражения:
q a 1
a
b a 1
a
2 |
|
a sin sin d , |
(2.75) |
0 |
|
2 |
|
a sin cos d . |
(2.76) |
0 |
|
Используя две гипотезы, нелинейность заменили линейным элементом с передаточной функцией (2.72); ее можно охарактеризовать пучком прямых, наклон которых зависит от амплитуды автоколебаний. Из множества этих прямых необходимо выбрать ту прямую, при подстановке которой в (2.66), т. е. c q a , получим порождающую систему.
Для нахождения амплитуды и частоты колебаний обычно используют графоаналитический метод, который является частотным методом анализа нелинейных систем. Для этого (2.66) записывается в частотной области с учетом подстановки c q a :
Q j R j q a 0. |
(2.77) |
Из (2.77) выражаем коэффициент гармонической линеаризации
q a Q j R j
или, что то же самое,
q a 1 .
W j
43
Таким образом, для нахождения частоты и амплитуды колебаний необходимо построить характеристику, обратную амплитудно-фазовой характеристике линейной части системы, взятой с обратным знаком. Далее на той же комплексной плоскости построить для рассматриваемого случая характеристику коэффициента гармонической линеаризации (в общем случае ампли- тудно-фазовую характеристику звена, определяемого передаточными функциями вида (2.72) и (2.74)). Найти точки пересечения, которые и дадут значения искомых величин частоты и амплитуды автоколебаний. Дополнительно необходимо провести анализ устойчивости найденных параметров автоколебаний.
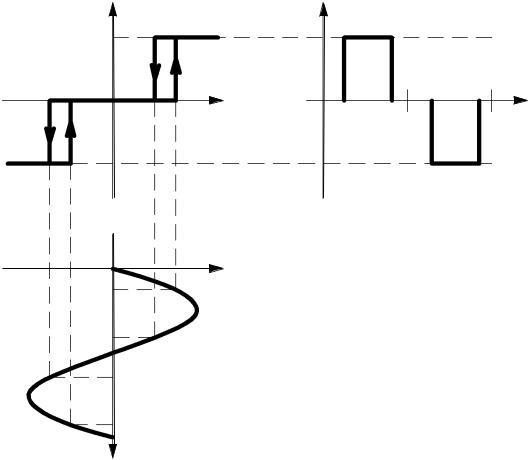
Приведем пример вычисления коэффициента гармонической линеаризации для нелинейного звена с петлевой характеристикой релейного типа с гистерезисом при условии, что амплитуда гармонических колебаний больше r. График, отражающий прохождение гармонического сигнала через звено с насыщением, приведен на рис. 2.19.
|
|
|
|
|
x2 |
|
|
x2 |
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
r |
|
mr |
mr |
r |
|
|
π |
2π |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
x1 |
u1 |
u2 |
u = ωt |
|
|
|
|
|
|
–c |
|
|
|
|
|
|
x1
u1
u2
x1 = asin(u)
u3
u4
u = ωt
Рис. 2.19. Построение функции на выходе релейного звена с гистерезисом
44

Вычислим коэффициент гармонической линеаризации q a согласно выражению (2.75). Следует отметить, что выходную функцию можно рассматривать только на интервале u t 0; . При этом необходимо удвоить значение подынтегрального выражения. Кроме того, сама выходная функция на этом отрезке может быть описана следующим выражением:
|
|
0 u u1, |
x2 |
0, |
|
|
u2 u , |
|
|
|
|
|
c, u1 u u2 , |
|
где абсциссы u1 и u2 вычисляются из решения следующих уравнений:
a sin u1 r , a sin u2 mr .
Таким образом,
u1 arcsin ar ,
u2 |
arcsin |
mr |
. |
(2.78) |
|
||||
|
|
a |
|
|
Тогда коэффициент гармонической линеаризации можно вычислить так:
|
q a |
2 |
|
|
a sin u sin u du |
|
2 |
|
u2 |
|
|
|
|
|
2c |
|
|
|
u1 |
|
|
|
|
|
|
|
|||||||||
|
x2 |
|
|
csin u du |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
cosu |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
a |
0 |
|
|
|
|
|
a |
u |
|
|
|
|
|
a |
|
|
|
u2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2c |
|
|
|
r |
|
|
|
mr |
|
|
|
|
|
r |
2 |
|
|
|
|
m |
2 |
r |
2 |
|
||||||||||
|
|
|
|
|
|
2c |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
cos arcsin |
|
|
|
cos |
arcsin |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
. |
|||||||
|
|
|
|
|
|
a |
a2 |
|
|
|
|
|
|||||||||||||||||||||||
|
a |
|
|
|
a |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
a2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.79)
Аналогичным образом найдем коэффициент гармонической линеаризации b a согласно выражению (2.76):
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
u2 |
|
|
2c |
|
|
|
|
|
|
|
|||||
|
|
|
|
b a |
|
x2 a sin u cosu du |
|
c cosu du |
|
u2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
sin u |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
a |
0 |
|
|
|
|
a |
u |
|
|
a |
|
u1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2c |
|
|
|
|
mr |
|
r |
|
2c |
|
|
|
mr |
|
|
|
|
r |
|
||||||||
|
|
sin |
arcsin |
|
|
sin arcsin |
|
|
|
|
|
|
sin arcsin |
|
|
|
|
sin arcsin |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
a |
|
|
|
|
a |
|
a |
|
a |
|
|
|
a |
|
|
|
|
a |
|
||||||||
45

|
2c mr |
|
r |
|
2cr |
1 |
m . |
|||
|
|
|
|
|
|
|||||
|
|
|
a2 |
|||||||
|
a |
a |
|
a |
|
|
|
|||
Таким образом, коэффициенты гармонической линеаризации для релейного звена с гистерезисом определяются следующей системой:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2c |
|
|
r |
2 |
|
|
|
|
m |
2 |
r |
2 |
|
|
|
||
q a |
|
1 |
|
|
|
|
1 |
|
|
|
|
, |
(2.80) |
|||||
a |
a2 |
a2 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b a |
2cr |
1 m . |
|
|
|
|
|
|
(2.81) |
||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Необходимо отметить, что на основании (2.80) и (2.81) можно получить коэффициенты гармонической линеаризации и для других нелинейных элементов, а именно: трехпозиционного реле, положив m 1; двухпозиционного реле, положив r 0 .
2.3.6. Метод гармонического баланса
Метод гармонического баланса не использует гипотезы порождающей системы. Для пояснения метода на рис. 2.20 приведем структурную схему нелинейной системы.
x |
WНЭ(A) |
y |
W(jΩ) |
z |
|
|
|
|
|
||
|
|
|
|
|
|
Рис. 2.20. Структурная схема нелинейной системы
x
Разомкнем обратную связь, как это показано на рисунке. Пусть в системе существует автоколебательный режим. В данном режиме первые гармоники величин x и y на входе и выходе нелинейного элемента соответственно равны
a sin t , (2.82) (2.83)
вкомплексной форме (2.82) и (2.83) принимают вид
xae j t ,
y a g jb e j t g jb x .
На выходе разомкнутой системы
z yW j W j g jb x W j Wнэ a x .
Автоколебания в замкнутой системе будут существовать только тогда, когда выход и вход разомкнутой системы связаны соотношением
z x ,
46

т. е. выполняется баланс фаз и амплитуд входного и выходного сигналов. Тогда с учетом равенства (2.77) получим
W j Wнэ a 1 x 0 . |
|
(2.84) |
||||
Так как равенство справедливо для любых t, то приравняем нулю выра- |
||||||
жение в квадратных скобках из (2.84): |
|
|
|
|
|
|
W j Wнэ a 1 0 . |
|
(2.85) |
||||
Из (2.85) легко получить два выражения, позволяющих найти параметры |
||||||
автоколебаний: |
|
|
|
|
|
|
W j W 1 a |
|
|
1 |
, |
(2.86) |
|
|
|
|
||||
нэ |
|
g jb |
|
|
||
|
|
|
|
|||
Wнэ a |
1 |
|
|
. |
|
(2.87) |
|
|
|
|
|||
W j |
|
|||||
|
|
|
|
|||
Равенства (2.86) и (2.87) используются для графоаналитического решения задачи. Вариант такого решения при использовании (2.87) приведен на рис. 2.21.
jIm
Re
1
1 W ( j)
2
q( A) + jb(A)
Рис. 2.21. Определение параметров автоколебаний
Для нахождения графоаналитического решения на комплексной плоскости строится величина, обратная амплитудно-фазовой характеристике линейной части, взятая с противоположным знаком, и кривая гармонического коэффициента передачи. На первой точками отмечают ряд значений частот 1 ,2 , …, на второй – значения амплитуд A1, A2 , …. В точках пересечения кривых с помощью интерполяции между соседними с ними значениями i ,
47
i1 и A j , Aj 1 находят значения частоты 0 и амплитуды A0 автоколе-
баний.
В приведенном примере (рис. 2.21) две точки пересечения, а значит, и два набора параметров автоколебаний. Дополнительно решается вопрос устойчивости автоколебаний. Если при увеличении амплитуды точка выходит из области, охватываемой амплитудно-фазовой характеристикой системы, то колебания будут устойчивыми.
3. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ АВТОМАТИЧЕСКИХ СИСТЕМ
3.1. Постановка задачи устойчивости нелинейных систем по А. М. Ляпунову
Характерной особенностью линейных систем является возможность представления движения системы суммой свободной и вынужденной составляющих. Показателем устойчивости является стремление к нулю свободной составляющей при t . Для нелинейных систем в связи с неприменимостью принципа суперпозиции невозможно разделить процесс на свободную и вынужденную составляющие, поэтому процесс в нелинейных системах необходимо рассматривать как единое целое, что значительно усложняет исследование устойчивости.
Для нелинейных систем существует несколько понятий устойчивости в зависимости от областей возможных отклонений от состояния равновесия и наличия внешних возмущений.
В зависимости от наличия внешних воздействий все системы могут быть разделены на автономные и неавтономные системы. В автономных системах возможно два вида движений – равновесные состояния и автоколебательные режимы, устойчивость которых необходимо исследовать. Для неавтономных систем необходимо также исследовать устойчивость вынужденных режимов.
Естественным стремлением при исследовании устойчивости систем было стремление к применению единых методов, аналогичных исследованию устойчивости линейных систем. Это стремление привело к постановке А. М. Ляпуновым задачи исследования устойчивости. Основополагающим моментом в теории устойчивости по Ляпунову было понятие возмущенных и невозмущенных движений. Под невозмущенным движением понимается любое движение xн t , устойчивость которого исследуется. Это может быть со-
48

стояние равновесия, автоколебательный режим или вынужденное движение. Это движение можно получить при фиксированных начальных условиях, параметрах системы или внешних возмущениях.
Всякое другое движение считается возмущенным. Можно, в частности, считать, что любое возмущенное движение получается при подаче в момент времени t 0 импульсного внешнего возмущения. Состояние равновесия или автоколебательного режима можно считать невозмущенным движением.
|
|
|
|
|
|
|
xiн |
xnн , |
|
|
|
|
xiв |
xnв . |
|||
|
Пусть xн a x1н |
xв a x1в |
|
||||||||||||||
|
Пусть при t 0 выполняется неравенство |
|
xiв xiн |
|
. |
|
|||||||||||
|
|
|
|||||||||||||||
|
Невозмущенное движение считается |
|
|
|
|
x2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
устойчивым |
|
по |
Ляпунову, если |
при |
|
|
|
|
|
|
|||||||
0 t соблюдается система неравенств |
|
|
|
|
|
|
|||||||||||
|
xiв t xiн t |
|
|
для |
любого |
момента |
|
|
|
|
|
x1 |
|||||
|
|
|
|
|
|
|
|||||||||||
времени t . На фазовой плоскости приве- |
|
|
|
|
|
||||||||||||
денное определение устойчивости можно |
|
|
|
|
|
|
|||||||||||
проиллюстрировать рис. 3.1. |
|
|
|
|
|
|
|
|
|||||||||
|
Для анализа устойчивости устано- |
|
|
|
|
|
|
||||||||||
вившихся значений дополнительно |
сле- |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дует ввести |
|
понятие |
устойчивых значе- |
Рис. 3.1. Пояснение определения |
|||||||||||||
ний . При t |
|
xiв xiн |
|
. |
|
|
|||||||||||
|
|
|
|
|
|
устойчивости |
|
||||||||||
Для пояснения приведенного определения приведем пример. Пусть есть система с передаточной функцией
W |
k |
|
|
|
. |
|
|
Tp 1 |
|
||
Вычислим реакцию системы на единичную ступенчатую функцию сле- |
|||
дующим образом: |
|
||
Tp 1 xвх k 1 t . |
|
||
Переходная характеристика будет иметь вид: |
|
||
x t c e t T k . |
(3.1) |
||
1 |
|
|
|
Постоянная интегрирования c1 вычисляется по начальным условиям. |
|||
Сначала рассмотрим невозмущенное движение при |
x 0 0. Тогда из (3.1) |
||
подстановкой t 0 определяем c1, равное k . Таким образом, из (3.1) |
|||
x t k 1 e t T . |
(3.2) |
||
н |
|
||
49 |
|
|
|

Если же рассматривать возмущенное движение при x 0 , то получим, что c1 k . Таким образом, уравнение возмущенного движения:
x |
t k e t T k . |
(3.3) |
||||
|
в |
|
|
|
|
|
Используя (3.2) и (3.3), определим модуль разности |
|
|||||
|
x |
|
t x t |
|
e t T . |
(3.4) |
|
|
|
||||
|
в |
н |
|
|
|
|
Можно сделать вывод, что решение (3.1) асимптотически устойчиво, так как согласно (3.4) при t xв t xн t 0. Однако не всякое асимптотически устойчивое решение устойчиво по Ляпунову.
Рассмотрим еще один пример. Пусть есть линейная система второго по-
рядка, описываемая дифференциальным уравнением |
|
x 2 x 0. |
(3.5) |
0 |
|
Как и ранее, запишем невозмущенное и возмущенное решения уравнения (3.5) в виде xн x0 cos 0t , xв x0 cos 0t .
Модуль разности невозмущенного и возмущенного движения определя-
ется выражением |
|
xв t xн t cos 0t . |
(3.6) |
При t разность невозмущенного и возмущенного движения (3.6) не устанавливается и не стремится к нулю, поэтому нельзя говорить об асимптотической устойчивости.
Если условие xв t xн t 0 при t выполняется в малой области , то говорят об асимптотической устойчивости в малом; если область– ограниченная, то в большом; если , то об устойчивости в целом.
Если область – отрезок на оси, то говорят об устойчивости, но не асимптотической.
Все приведенные определения устойчивости могут быть отнесены к устойчивости состояния равновесия, автоколебательных и вынужденных режимов. Для суждения об устойчивости автоколебаний вводится понятие орбитальной устойчивости.
Периодическое движение (автоколебание) в фазовом пространстве изображается некоторой замкнутой кривой G G x1, ..., xn . Представляя любую
фазовую траекторию геометрическим местом точек конца вектора , мож- x t
но для любого момента времени определить кратчайшее расстояние от конца
50