

Основные параметры кулачкового механизма
Кулачок механизма характеризуется двумя профилями: центровым (или теоретическим) и конструктивным. Под конструктивным понимается наружный рабочий профиль кулачка. Теоретическим или центровым называется профиль, который в системе координат кулачка описывает центр ролика (или скругления рабочего профиля толкателя) при движении ролика по конструктивному профилю кулачка. Фазовым углом i называется угол поворота кулачка. Профильным углом i называется угловая координата текущей рабочей точки теоретического профиля, соответствующая текущему фазовому углу i.
В общем случае фазовый угол не равен профильному ii. На рис. 8.3 изображена схема плоского кулачкового механизма с двумя видами выходного звена: внеосным с поступательным движением и качающимся (с возвратно-вращательным движением). На этой схеме указаны основные параметры плоских кулачковых механизмов.
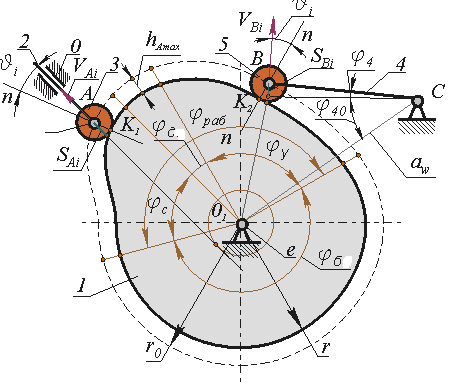
Рис. 8.3
|
SAi и SВi |
- текущие значения перемещения центров роликов |
|
40 |
- начальная угловая координата коромысла |
|
4 |
- текущее угловое перемещение коромысла |
|
hAmax |
- максимальное перемещение центра ролика |
|
r0 |
- радиус начальной шайбы центрового профиля кулачка |
|
r |
- радиус начальной шайбы конструктивного профиля кулачка |
|
rp |
- радиус ролика (скругления рабочего участка толкателя) |
|
i |
- текущее значение угла давления |
|
aw |
- межосевое (межцентровое) расстояние |
|
e |
- внеосность (эксцентриситет) |
Теоретический профиль кулачка обычно представляется в полярных координатах зависимостью i = f(di), где i - радиус-вектор текущей точки теоретического или центрового профиля кулачка.
Циклограмма работы кулачкового механизма
Большинство кулачковых механизмов относится к цикловым механизмам с периодом цикла равным 2. В цикле движения толкателя в общем случае можно выделить четыре фазы (рис.8.4): удаления из самого близкого (по отношению к центру вращения кулачка) в самое дальнее положение, дальнего стояния (или выстоя в самом дальнем положении), возвращения из самого дальнего положения в самое близкое и ближнего стояния (выстоя в самом ближнем положении). В соответствии с этим, углы поворота кулачка или фазовые углы делятся на:
угол удаления y
угол дальнего стояния д
угол возвращения в
угол ближнего стояния б.
Сумму φу + φд + φв называют рабочим углом и обозначают φр. Следовательно,
φу + φд + φв = φр.
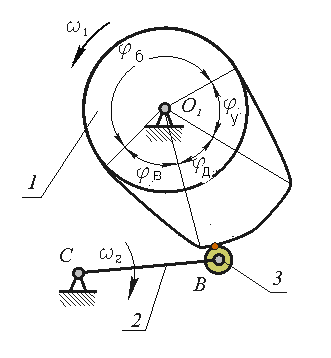
Рис.8.4
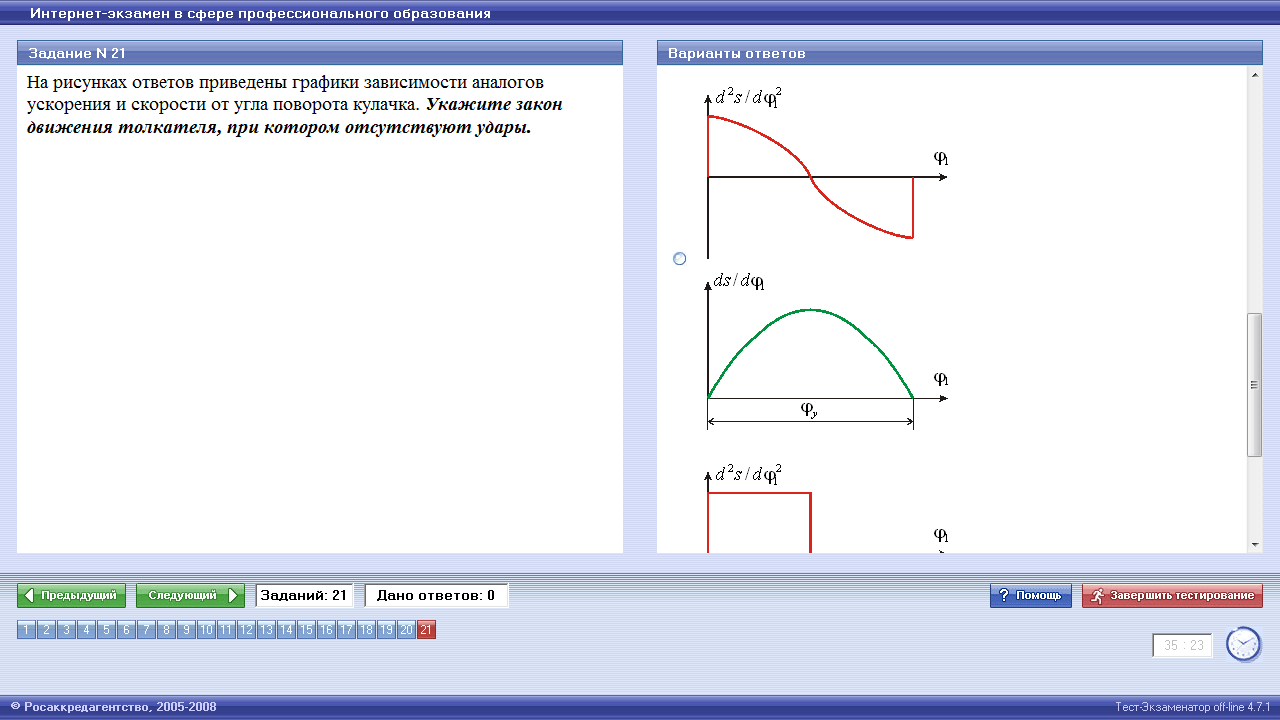
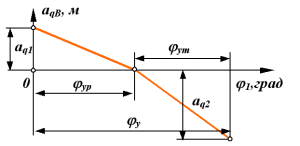
Типовые законы движения толкателя.
При проектировании кулачковых механизмов выбирается закон движения толкателя из набора типовых.
Типовые законы движения делятся на законы с жесткими и мягкими ударами и законы безударные. С точки зрения динамических нагрузок, желательны безударные законы. Однако кулачки с такими законами движения технологически более сложны, так как требуют более точного и сложного оборудования, поэтому из изготовление существенно дороже. Законы с жесткими ударами имеют весьма ограниченное применение и используются в неответственных механизмах при низких скоростях движения и невысокой долговечности. Кулачки с безударными законами целесообразно применять в механизмах с высокими скоростями движения при жестких требованиях к точности и долговечности. Наибольшее распространение получили законы движения с мягкими ударами, с помощью которых можно обеспечить рациональное сочетание стоимости изготовления и эксплуатационных характеристик механизма.
После выбора вида закона движения, обычно методом кинематических диаграмм, проводят геометро-кинематическое исследование механизма и определяют закон перемещения толкателя и закон изменения за цикл первой передаточной функции.
Таблица 8.1
|
№ п.п. |
Типовой закон движения |
Параметры закона движения | ||||
|
1. |
Линейный |
с жесткими ударами
| ||||
|
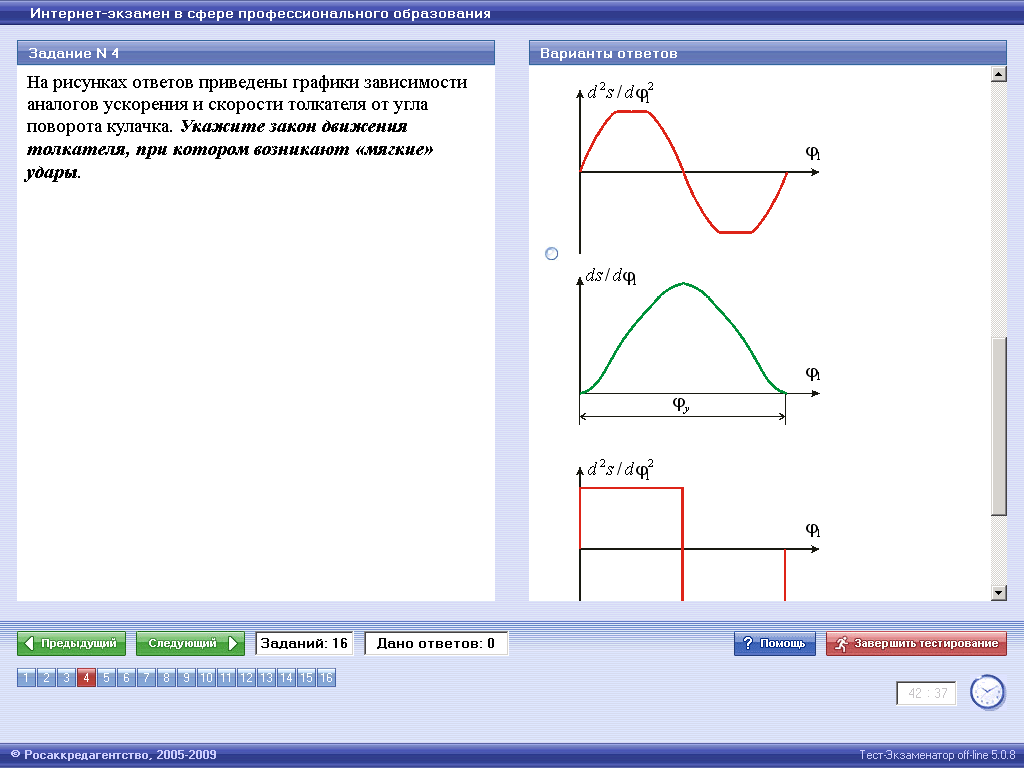
2. |
параболический |
с мягкими ударами aq1aq2; урур; aq1ур = aq2ут или aq1 = aq2; ур = ур; aq1ур = aq2ут | ||||
|
3. |
косинусоидальный |
с мягкими ударами aq1 aq2; ур ут; aq3 aq4 ; (aq1+aq2)ур = =(aq3+aq4)ут | ||||
|
4. |
полинома |
с мягкими ударами aq1 aq2; урут; 0.5 aq1ур= 0.5 aq2ут | ||||
|
5. |
полинома |
безударный aq1 aq2; урут; 0.5 aq1ур= 0.5 aq2ут | ||||
|
6. |
Синусоидальный |
безударный aq1 aq2; урут ;
|

Критерии работоспособности и угол давления при передаче движения в высшей кинематической паре.
Угол
давления
![]() определяет
положение нормали п-п
в высшей КП относительно вектора скорости
и контактной точки ведомого звена (рис.
8.5, а, б).
Его величина определяется размерами
механизма, передаточной функцией
определяет
положение нормали п-п
в высшей КП относительно вектора скорости
и контактной точки ведомого звена (рис.
8.5, а, б).
Его величина определяется размерами
механизма, передаточной функцией
![]() и перемещения толкателяS.
и перемещения толкателяS.
Угол передачи движения γ - угол между векторами υ2 и υотн абсолютной и относительной (по отношению к кулачку) скоростей той точки толкателя, которая находится в точке контакта А (рис. 8.5, а, б):
![]() .
.
Если пренебречь силой трения между кулачком и толкателем, то силой, приводящей в движение толкатель (движущей силой), является давление Q кулачка, приложенное к толкателю в точке А и направленное по общей нормали п-п к профилям кулачка и толкателя. Разложим силу Q на взаимно перпендикулярные составляющие Q1 и Q2, из которых первая направлена по направлению скорости υ2. Сила Q1 перемещает толкатель, преодолевая при этом все полезные (связанные с выполнением технологических задач) и вредные (силы трения) сопротивления, приложенные к толкателю. Сила Q2 увеличивает силы трения в кинематической паре, образованной толкателем и стойкой.
Очевидно, что с уменьшением угла γ сила Q1 уменьшается, а сила Q2 увеличивается. При некотором значении угла γ может оказаться, что сила Q1 не сможет преодолеть все сопротивления, приложенные к толкателю, и механизм не будет работать. Такое явление называют заклиниванием механизма, а угол γ, при котором оно имеет место, называют углом заклинивания γзакл .
При
проектировании кулачкового механизма
задают допускаемое значение угла
давления
![]() доп
, обеспечивающее выполнения условия γ
≥
γ min
> γ закл
,
т.
е. текущий угол
γ
ни в одном положении кулачкового
механизма не должен быть меньше
минимального угла передачи
γ
min
и значительно превосходить угол
заклинивания γзакл
.
доп
, обеспечивающее выполнения условия γ
≥
γ min
> γ закл
,
т.
е. текущий угол
γ
ни в одном положении кулачкового
механизма не должен быть меньше
минимального угла передачи
γ
min
и значительно превосходить угол
заклинивания γзакл
.
Для кулачковых механизмов с поступательно движущимся толкателем рекомендуется γ min = 60° (рис. 8.5, а) и γmin = 45° - механизмов с вращающимся толкателем (рис. 8.5, б).
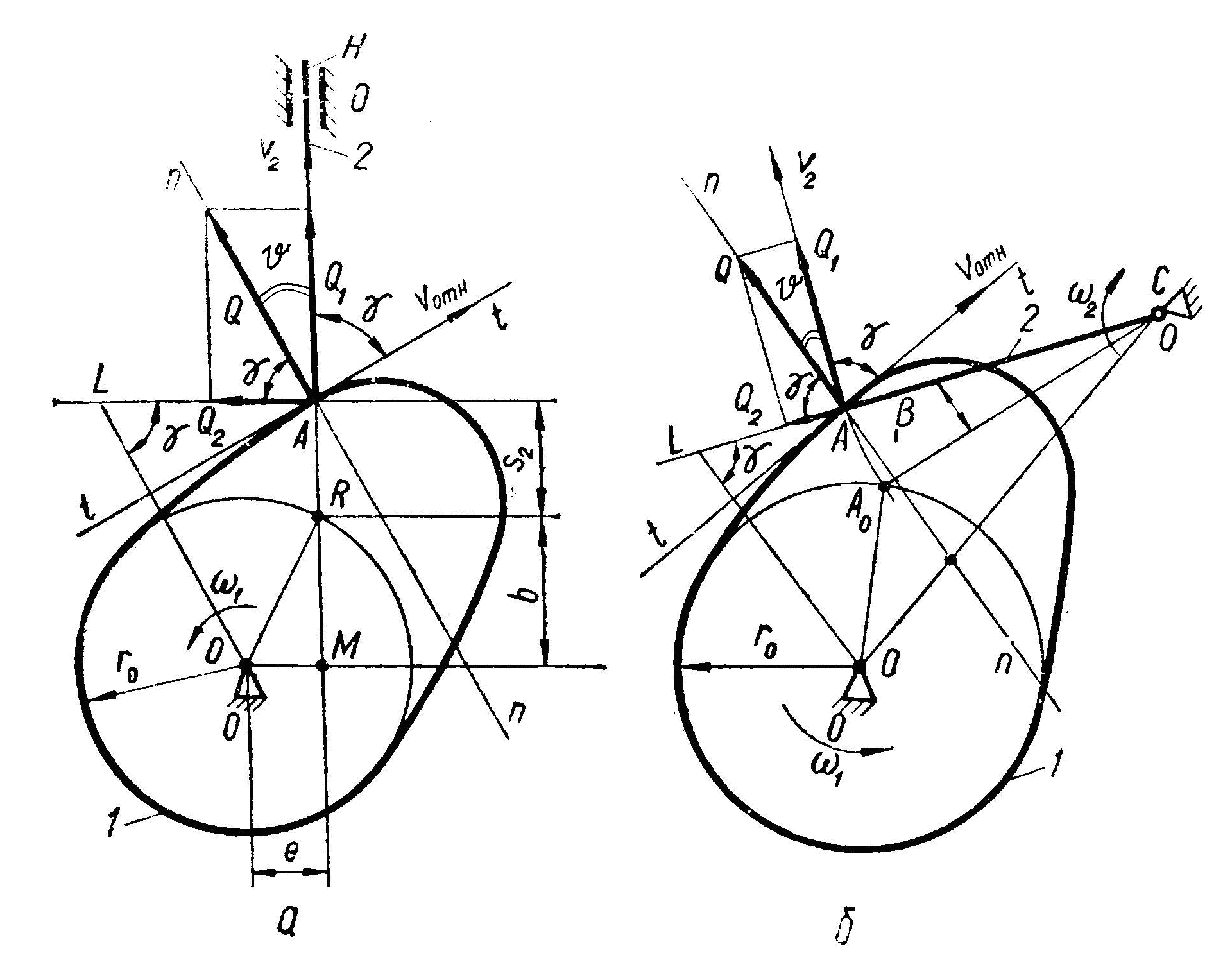
Рис. 8.5