

Лекция 8
Тема 8. Синтез кулачковых механизмов (2 часа)
Краткое содержание: Назначение и область применения кулачковых механизмов, основные преимущества и недостатки. Классификация кулачковых механизмов. Основные параметры кулачковых механизмов. Циклограмма работы кулачкового механизма. Типовые законы движения толкателя. Критерии работоспособности механизма и угол давления при передаче движения в высшей кинематической паре. Постановка задачи метрического синтеза. Этапы синтеза.
Контрольные вопросы.
Назначение и область применения кулачковых механизмов
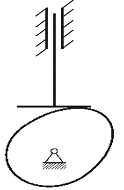
Кулачковым называется трехзвенный механизм (рис. 8.1) с высшей кинематической парой входное звено, которого называется кулачком (1), а выходное - толкателем или коромыслом (2). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено – ролик (3) и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью.
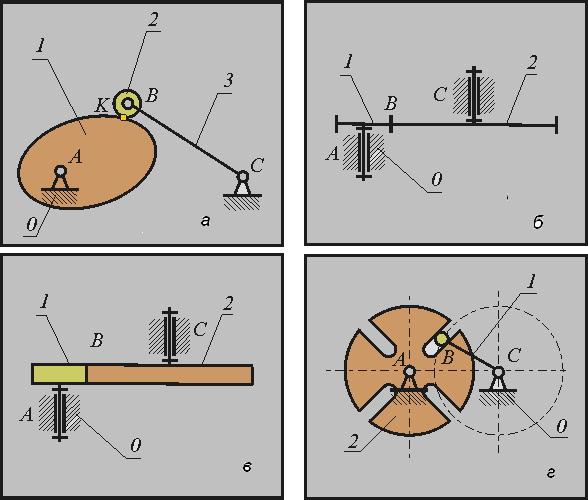
Рис. 8.1
Кулачковые механизмы предназначены для преобразования вращательного или поступательного движения кулачка в возвратно-вращательное или возвратно-поступательное движение толкателя. При этом в механизме с двумя подвижными звеньями можно реализовать преобразование движения по сложному закону. Важным преимуществом кулачковых механизмов является возможность обеспечения точных выстоев выходного звена. Это преимущество определило их широкое применение в простейших устройствах цикловой автоматики (распределительный вал) и в механических счетно-решающих устройствах (арифмометры, календарные механизмы). Кулачковые механизмы можно разделить на две группы. Механизмы первой обеспечивают перемещение толкателя по заданному закону движения. Механизмы второй группы обеспечивают только заданное максимальное перемещение выходного звена - ход толкателя. При этом закон, по которому осуществляется это перемещение, выбирается из набора типовых законов движения в зависимости от условий эксплуатации и технологии изготовления.
Классификация кулачковых механизмов:



а б в г д
рис. 8.1
Кулачковые механизмы классифицируются по следующим признакам:
по расположению звеньев в пространстве
пространственные
плоские
по движению кулачка
вращательное (рис. 8.1, а,б,в,г)
поступательное (рисю 8.1, д)
по движению выходного звена
возвратно-поступательное: с толкателем (рис. 8.1, а. б. в, д)
возвратно-вращательное: с коромыслом (рис. 8.1, г)
по наличию ролика
с роликом (рис. 8.1 б, д)
без ролика (рис. 8.1, а, в, г)
по виду кулачка
дисковый (плоский)
цилиндрический
по форме рабочей поверхности выходного звена
плоская (рис. 8.1, а)
заостренная (рис. 8.1, в)
цилиндрическая
сферическая
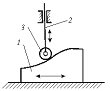
по способу замыкания элементов высшей пары
силовое (рис 8.2,а)
геометрическое (рис. 8.2, б)
При силовом замыкании удаление толкателя осуществляется воздействием контактной поверхности кулачка на толкатель (ведущее звено - кулачок, ведомое - толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины или силы веса толкателя, при этом кулачок не является ведущим звеном. При геометрическом замыкании движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении - воздействием внутренней рабочей поверхности кулачка на толкатель. На обеих фазах движения кулачок ведущее звено, толкатель - ведомое.
|
| |
|
а |
б |
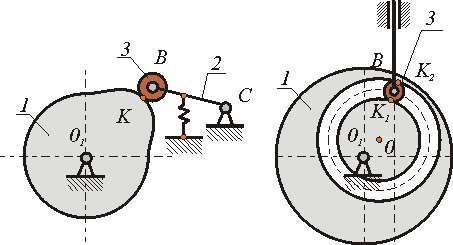
Рис. 8.2