

6.7.Функция wrs
6.7.Функция
WRS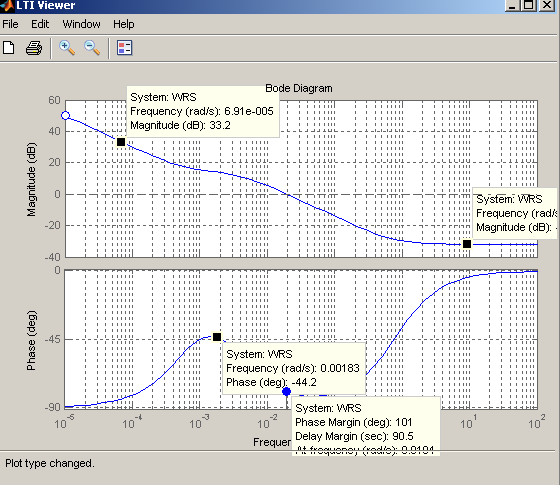
6.8.Функция WRS
6.9.Функция
WRS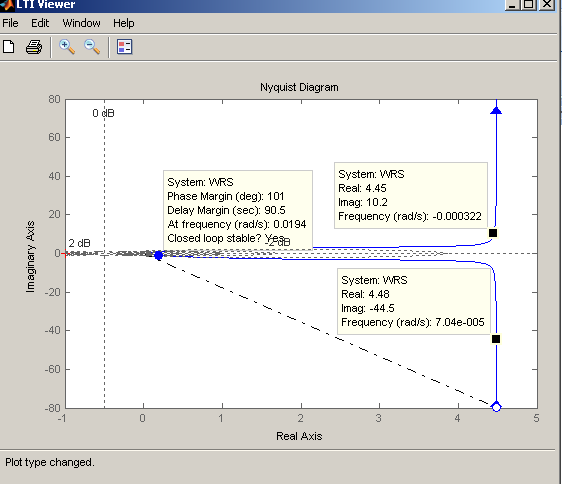
7.0.Функция WRS
7.1.Функция
WRS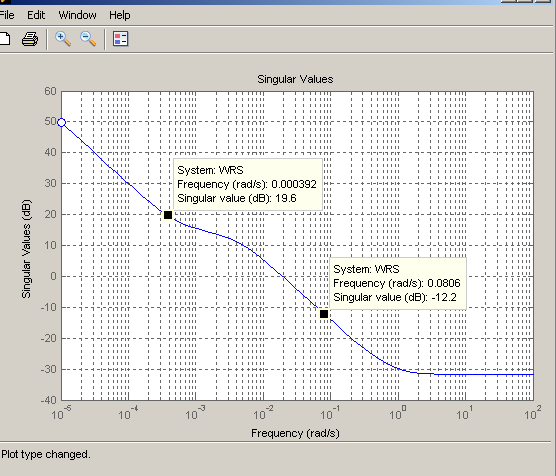
7.2.Функция WRS
7.3.Функция
WRS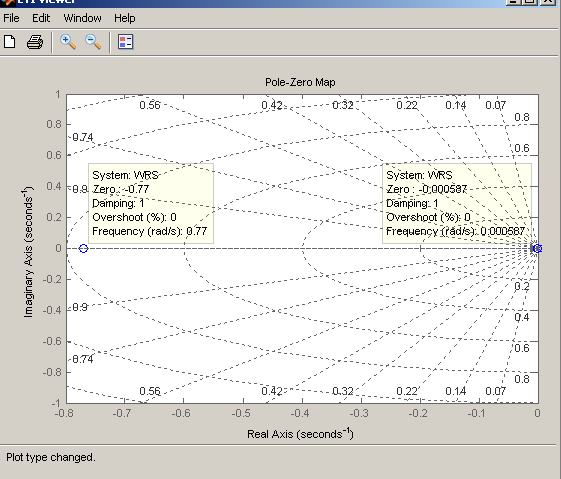
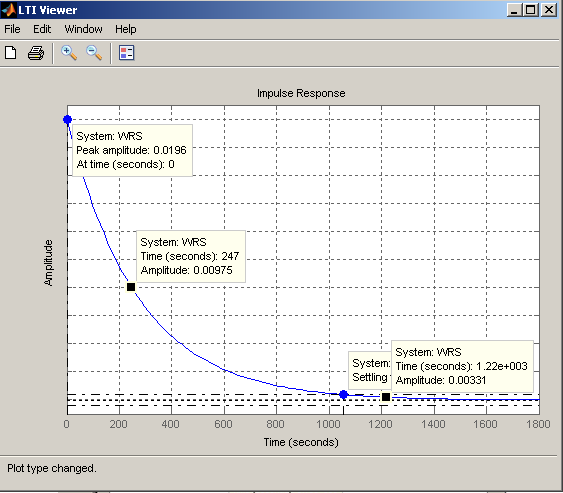
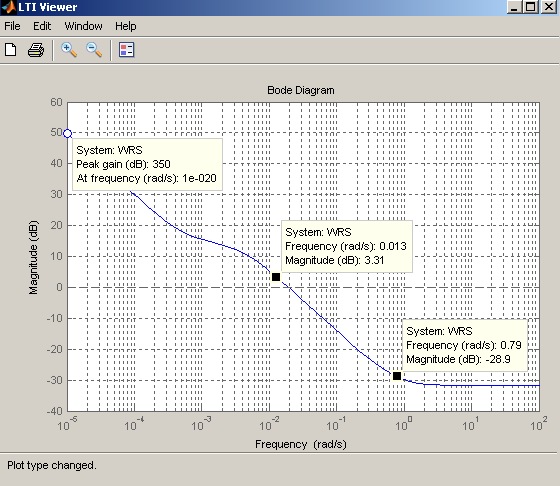
7.4.Функция WRS
step(WRS)
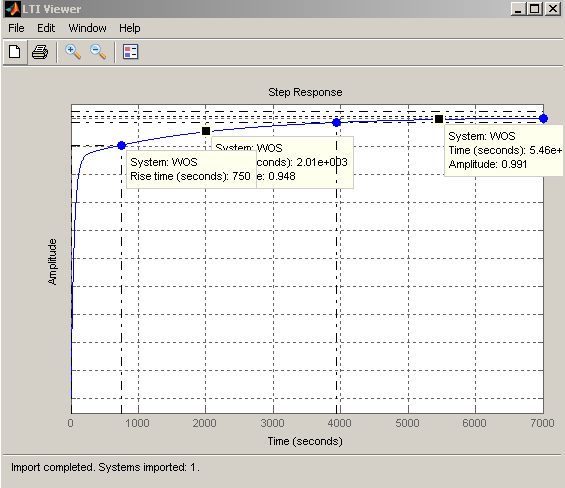
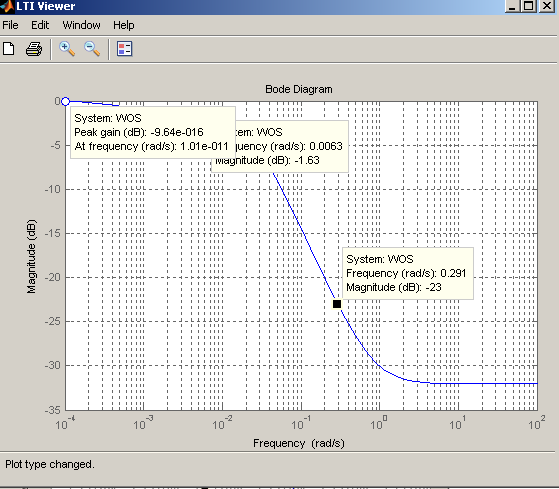
Замкнем систему отрицательной обратной связью с помощью функции Feedback и определим переходный процесс замкнутой системы
>> WOS=feedback(WRS,[1])
Transfer function:
796.3 s^2 + 613.8 s + 0.36
---------------------------
3.19e004 s^2 + 729 s + 0.36
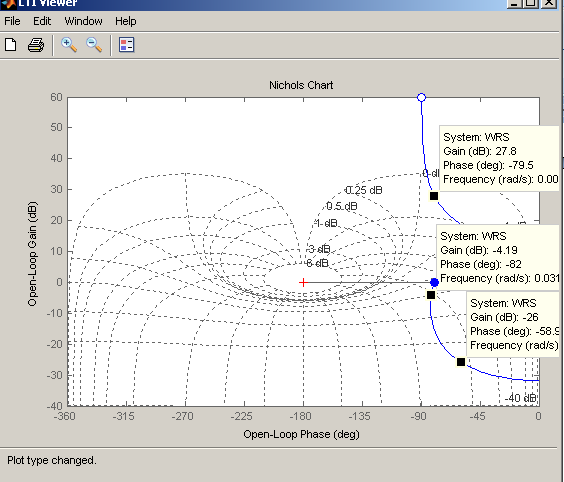
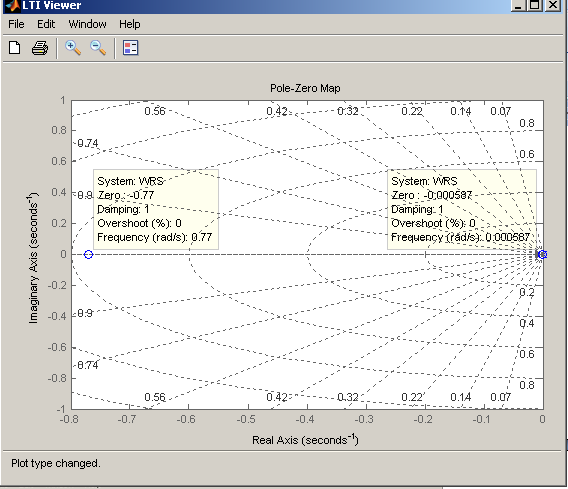
>>ltiview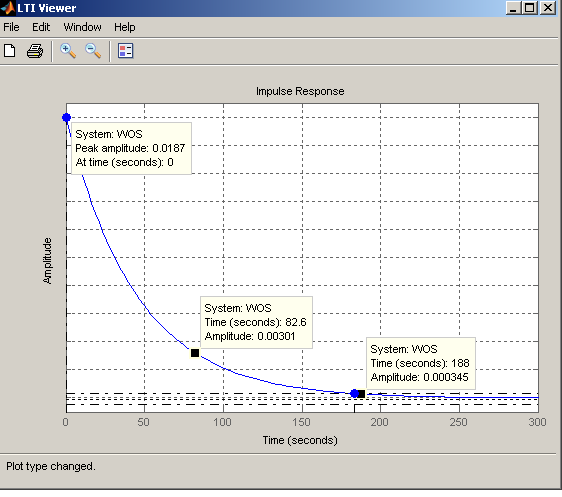
7.5.ФункцияWOS
7.6.ФункцияWOS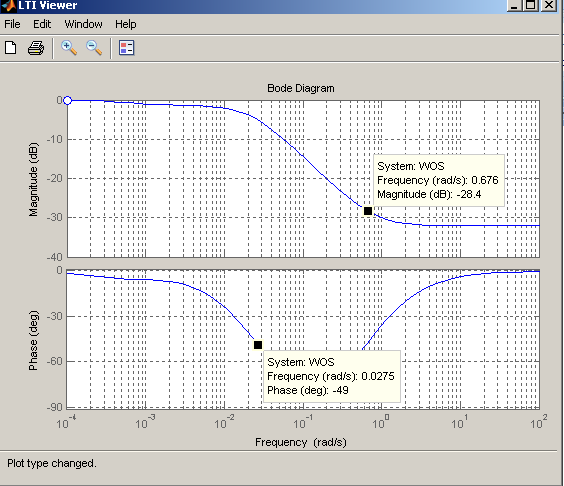
7.7.ФункцияWOS
7.8.ФункцияWOS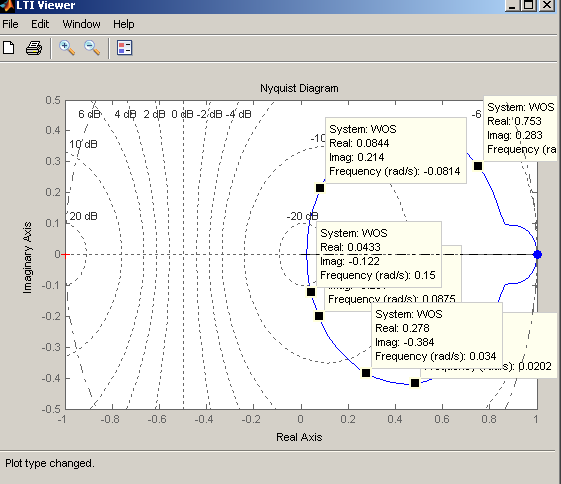
7.9.ФункцияWOS
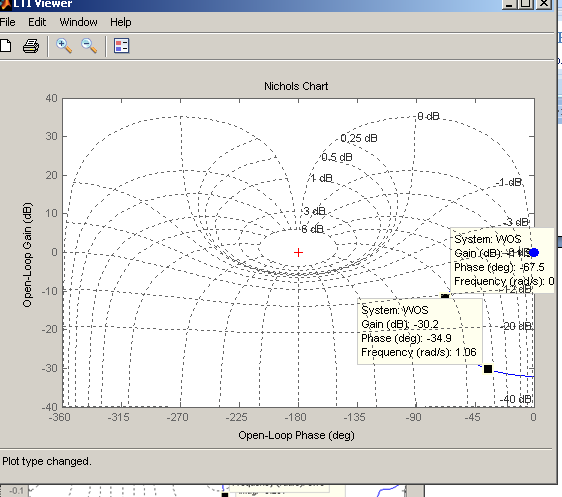
8.0.ФункцияWOS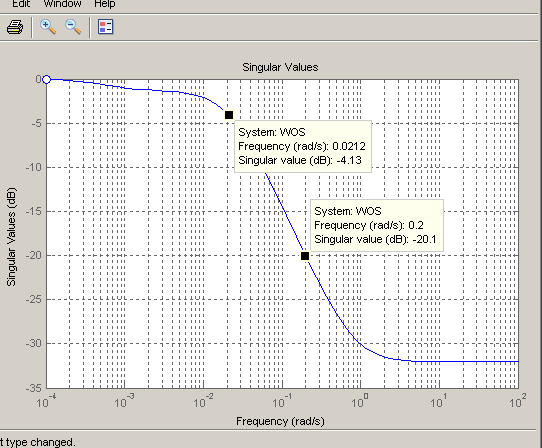
8.1.ФункцияWOS
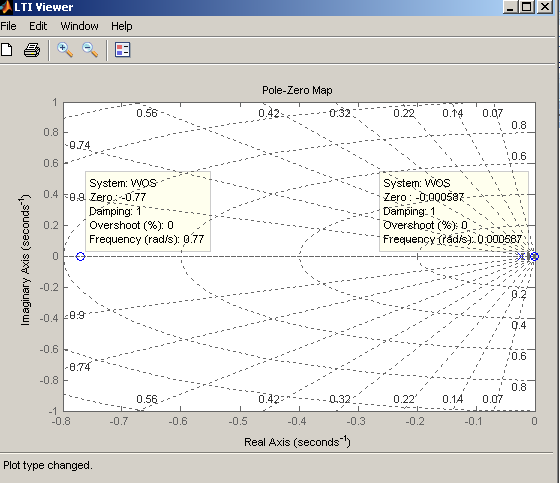
8.2.ФункцияWOS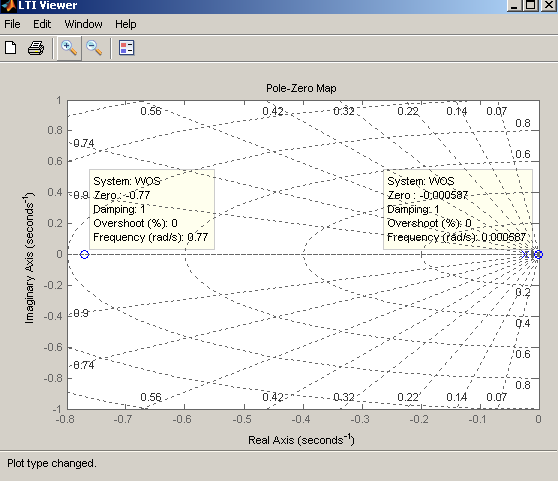
8.3.ФункцияWOS
Рассмотрим замкнутую систему с учетом запаздывания
Составим передаточную функцию звена чистого запаздывания
n5=[1 -0.125 0.0052]; m5=[1 0.125 0.0052]; WZ=tf(n5,m5)
Transfer function:
s^2 - 0.125 s + 0.0052
----------------------
s^2 + 0.125 s + 0.0052
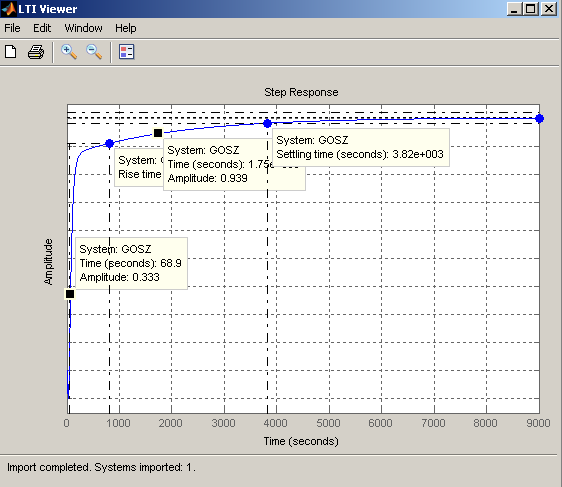
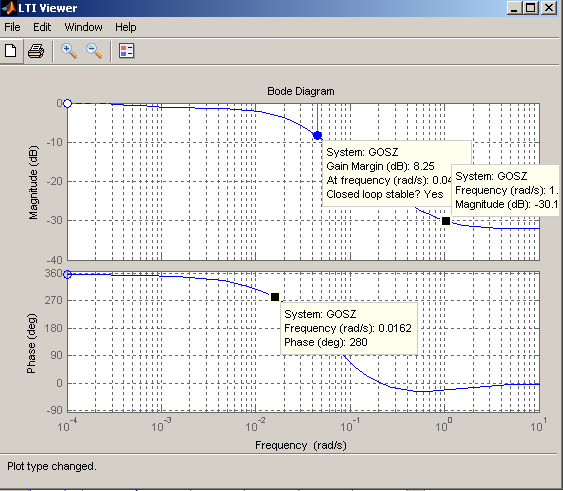
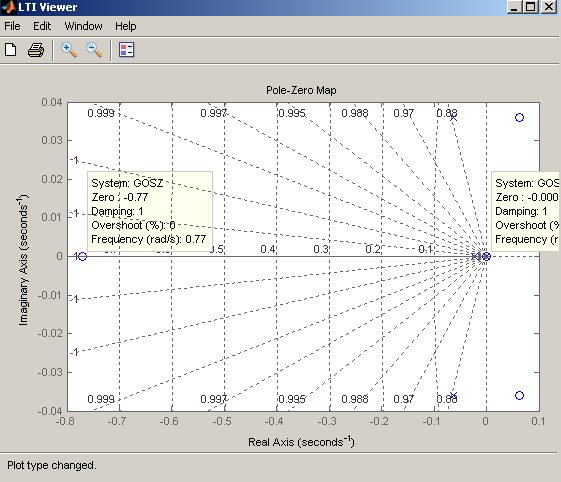
Передаточная функция замкнутой системы с ПиД–регулятором и с учетом запаздывания будет иметь вид:
>> GOSZ=WOS*WZ
Transfer function:
796.3 s^4 + 514.3 s^3 - 72.22 s^2 + 3.147 s + 0.001872
--------------------------------------------------------
3.19e004 s^4 + 4717 s^3 + 257.4 s^2 + 3.836 s + 0.001872
>>ltiview
8.4.ФункцияGosz
8.5.ФункцияGOSZ
8.6.ФункцияGOSZ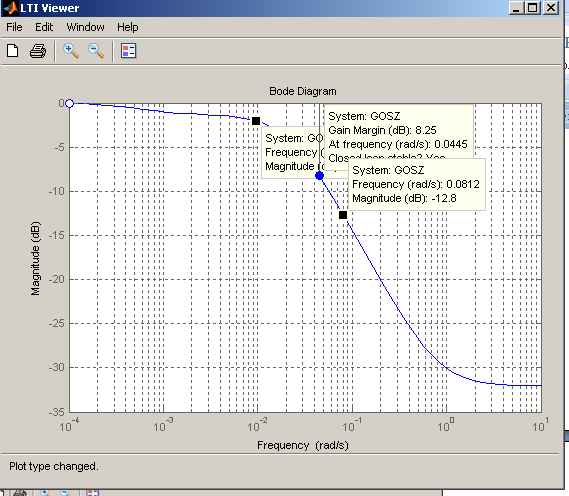
8.7.ФункцияGOSZ
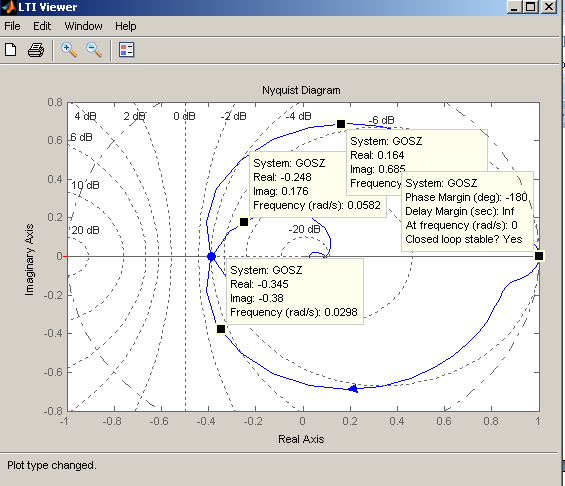
8.8.ФункцияGOSZ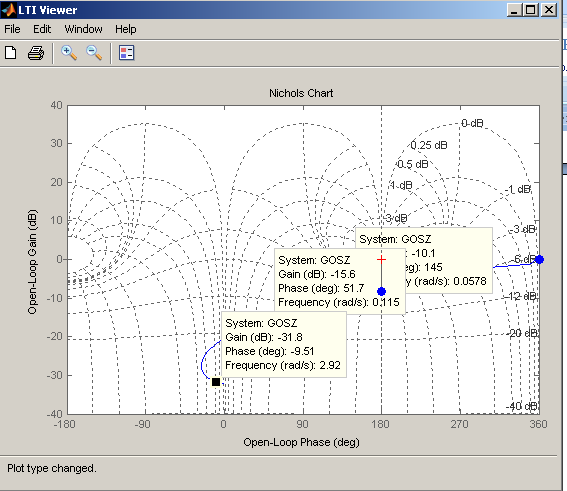
8.9.ФункцияGOSZ
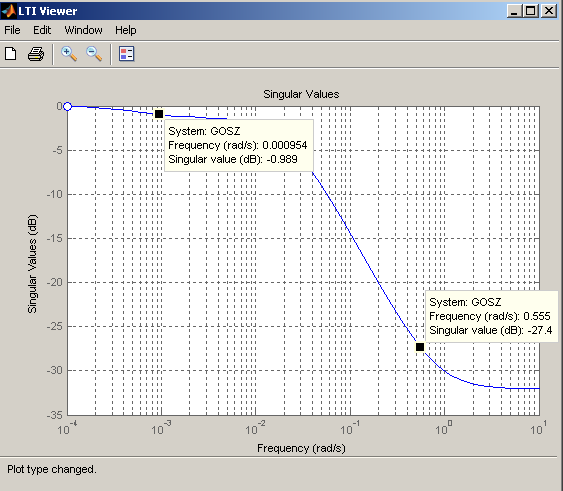
9.0.ФункцияGOSZ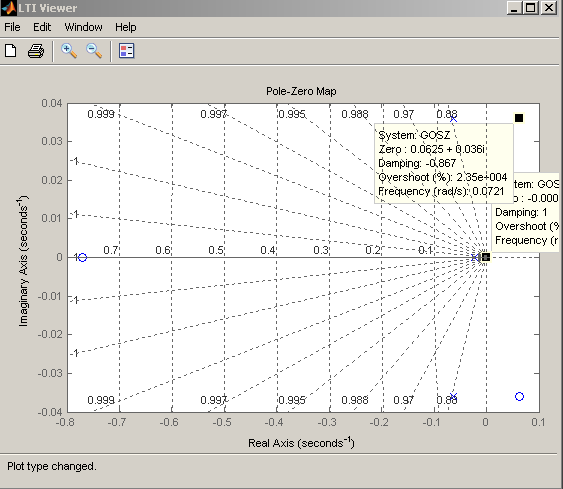
9.1.ФункцияGOSZ
9.2.ФункцияGOSZ
Заключение
Автоматическим регулированием называется поддержание постоянной, удержание в заданном диапазоне или изменение по заданному закону некоторой величины, характеризующей процесс, осуществляемое при помощи измерения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта. Управление охватывает больший круг задач. Под автоматическим управлением понимается автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления. Сравнивая определения управления и регулирования, можно заметить, что задачи регулирования входят в состав задач управления. Кроме того, задачи автоматического управления охватывают такие вопросы, как адаптация (самонастройка системы управления в соответствии с изменением параметров объекта или внешних воздействий); формирование оптимальных управляющих воздействий; автоматический выбор наилучших режимов из нескольких возможных; ряд других задач, не входящих в круг задач автоматического регулирования. Совокупность операций, необходимых для пуска и остановки процесса, а также для поддержания или изменения в требуемом направлении величин, характеризующих процесс, называется управлением. Совокупность операций управления, которые относятся к поддержанию или изменению показателей процесса, представляют собой регулирование. Операции управления может осуществлять человек, тогда управление будет ручным. Если же управление осуществляется автоматическим устройством, то управление будет называться автоматическим управлением, а выполняющее его устройство – автоматическим управляющим устройством
Автоматическое поддержание заданного закона изменения показателей процесса называется автоматическим регулированием. Изменяемые по заданному закону показатели процесса называются регулируемыми величинами или регулируемыми координатами. Автоматическое устройство, осуществляющее автоматическое регулирование, называется автоматическим регулятором. Совокупность регулируемого объекта и автоматического регулятора образуют систему автоматического регулирования(САР). Совокупность объекта управления и управляющего устройства называется системой автоматического управления (САУ).