1.1.Функция wrs

1.2.ФункцияWRS
1.3.Функция WRS
1.4.Функция
WRS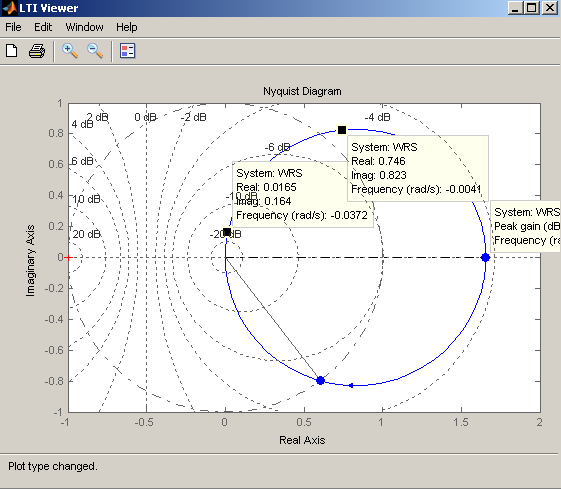
1.5.Функция WRS
1.6.Функция
WRS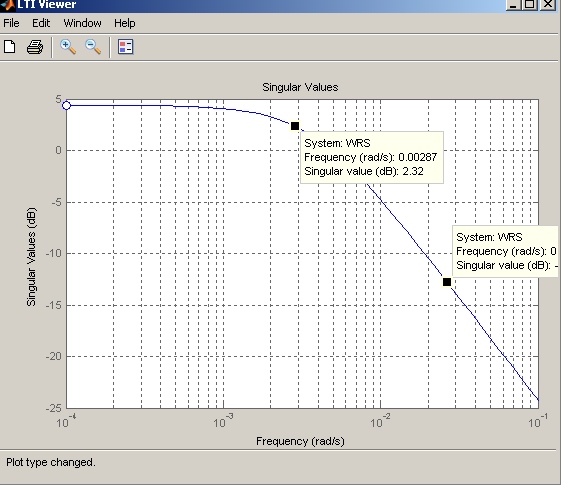
1.7.Функция WRS
1.8.Функция
WRS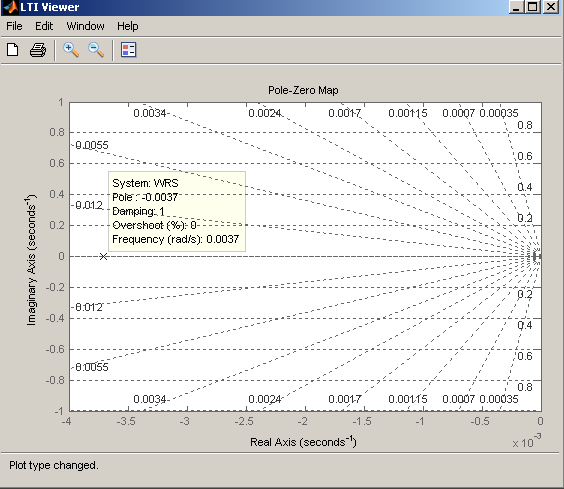
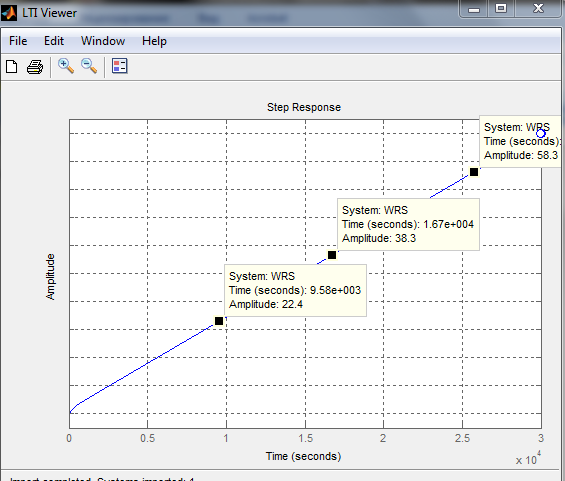
1.9.Функция WRS
>>steep(WRS)
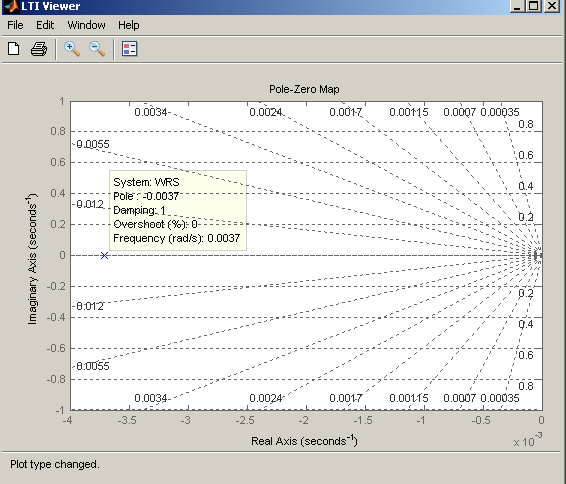
2.0.Функция WRS
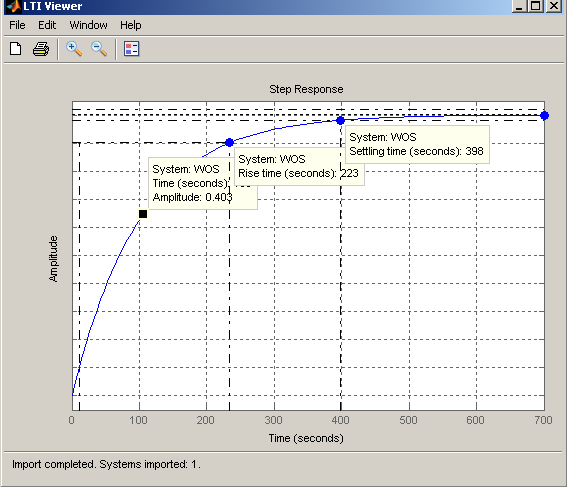
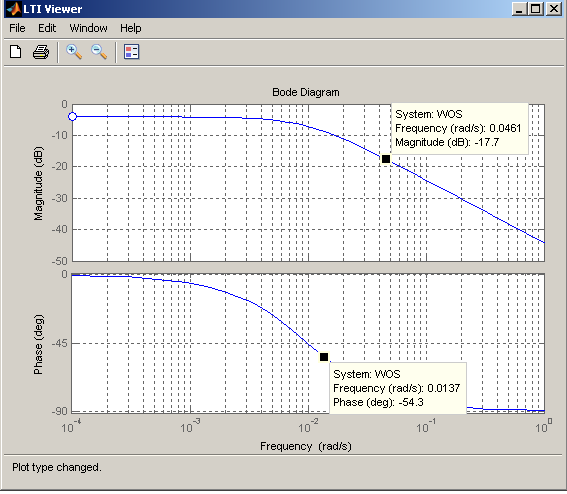
Замкнем систему отрицательной обратной связью с помощью функции Feedback и определим переходный процесс замкнутой системы
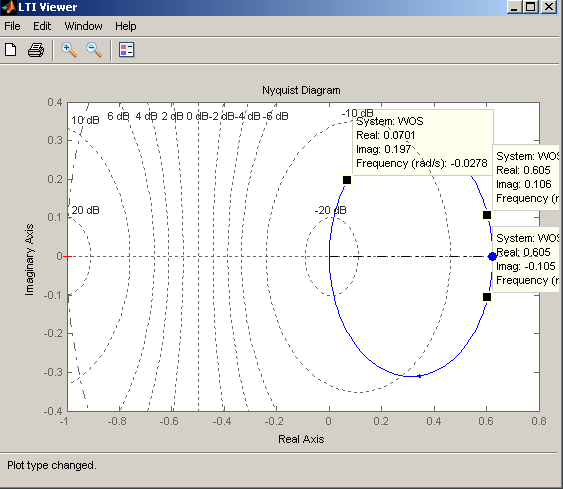
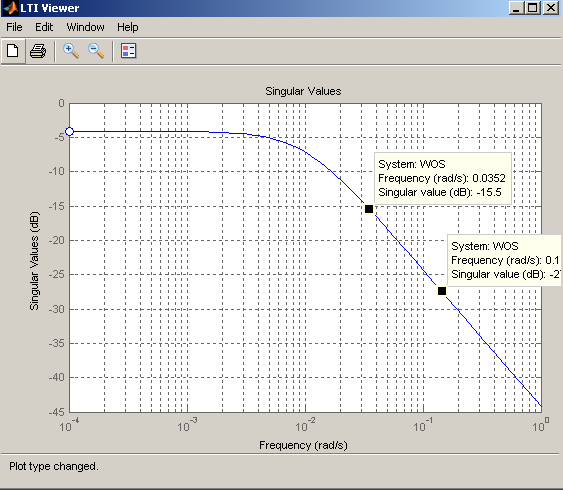
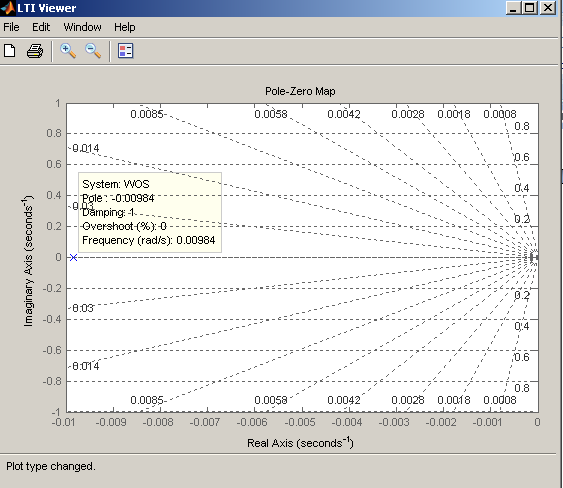
>>WOS=feedback(WRS,[1])
Transfer function:
1.656
-------------
270 s + 2.656
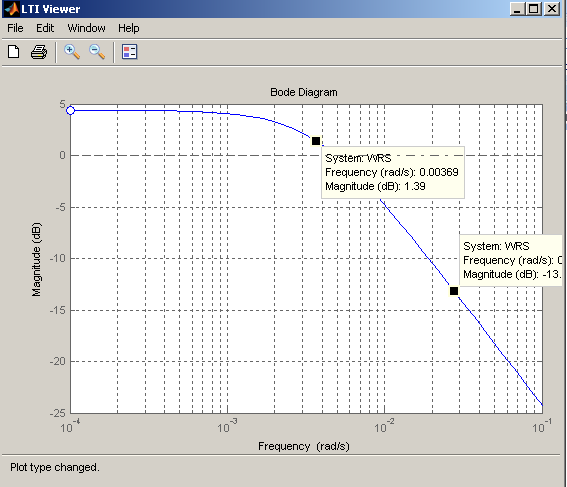
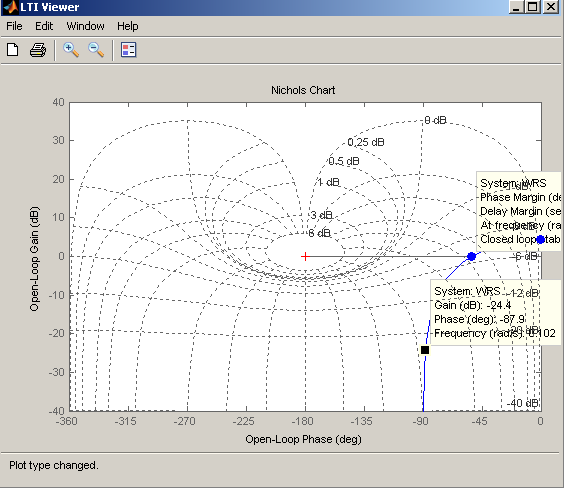
>>ltiview
>>
2.1.ФункцияWOS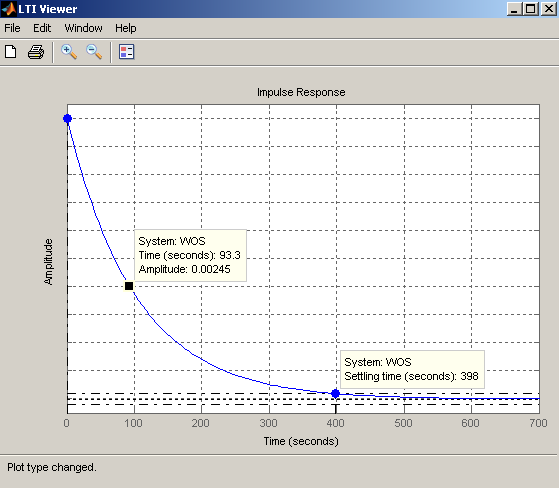
2.2.ФункцияWOS
2.3.ФункцияWOS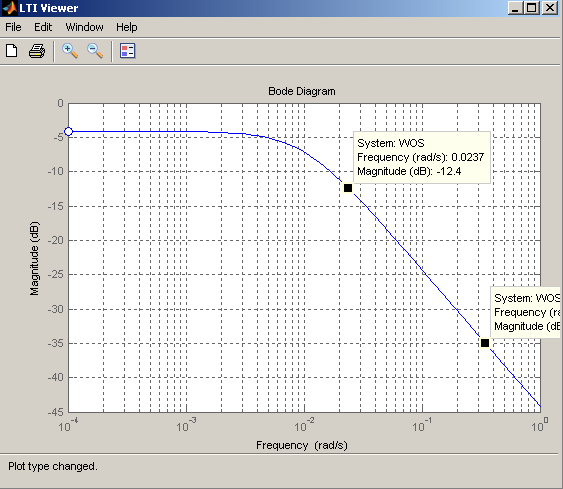
2.4.ФункцияWOS
2.5.ФункцияWOS
2.6.ФункцияWOS
2.7.ФункцияWOS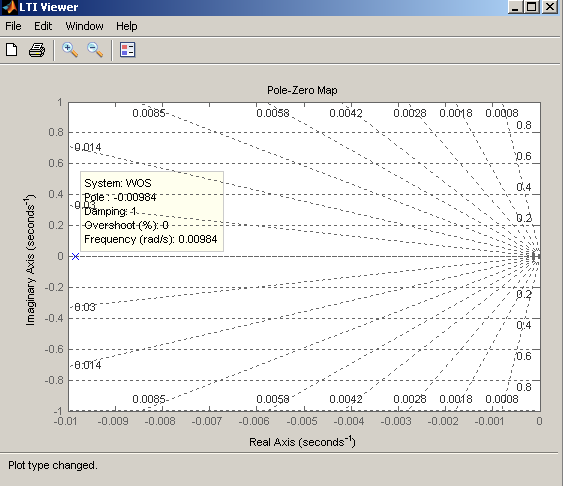
2.8.ФункцияWOS
2.9.ФункцияWOS
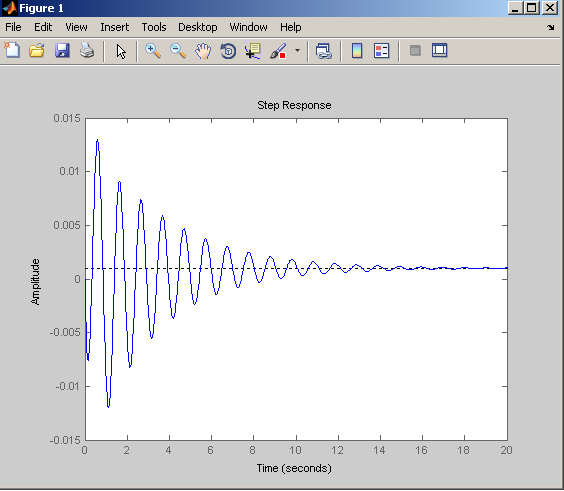
Рассмотрим замкнутую систему с учетом запаздывания
Составим передаточную функцию звена чистого запаздывания
>> n3=[1 -0.125 0.0052]; m3=[1 0.125 0.0052]; WZ=tf(n3,m3)
Transfer function:
s^2 - 0.125 s + 0.0052
----------------------
s^2 + 0.125 s + 0.0052
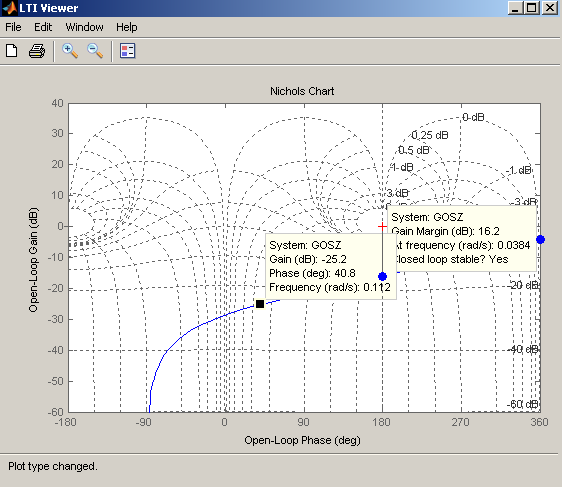
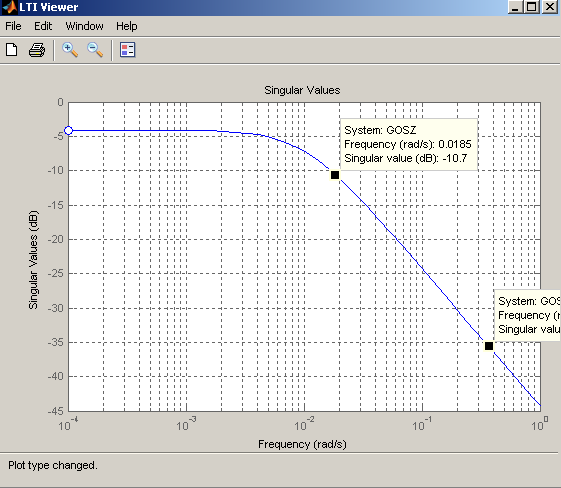
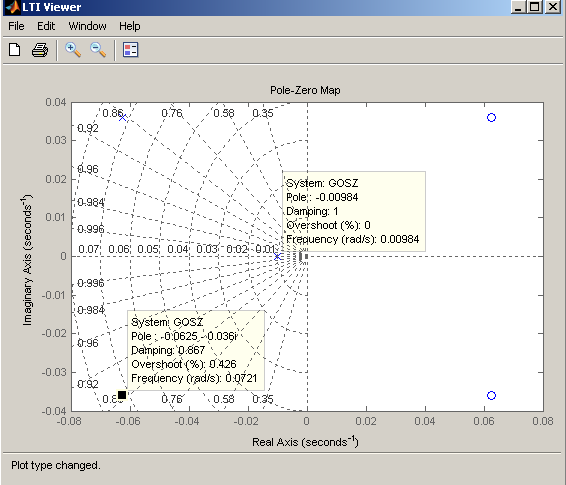
>> GOSZ=WOS*WZ
Transfer function:
1.656 s^2 - 0.207 s + 0.008611
---------------------------------------
270 s^3 + 36.41 s^2 + 1.736 s + 0.01381
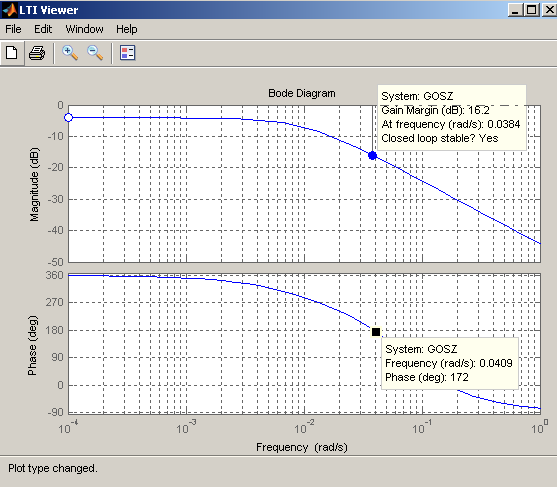
>>ltiview
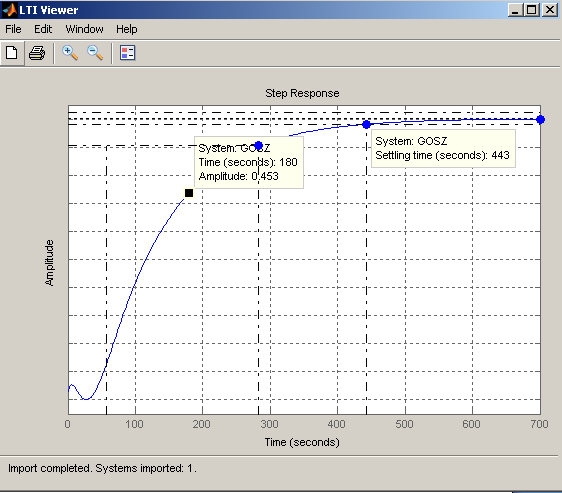
3.0.ФункцияGOSZ
3.1.ФункцияGOSZ
3.2.ФункцияGOSZ 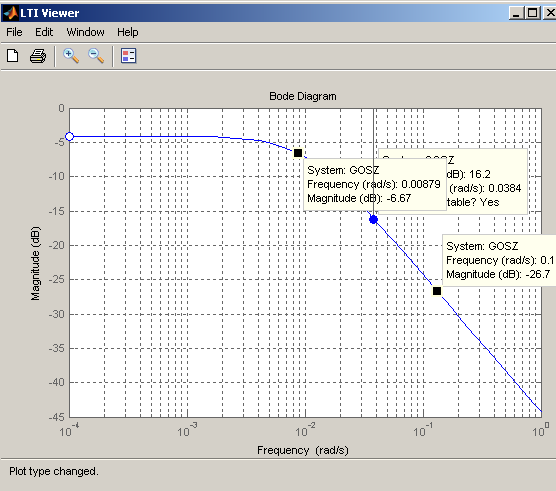
3.3.ФункцияGOSZ
3.4.ФункцияGOSZ 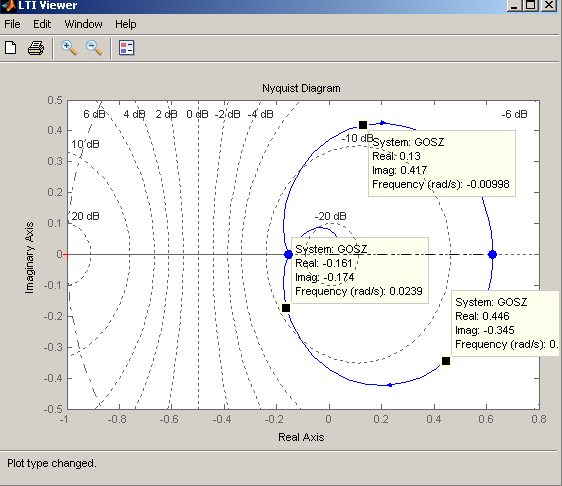
3.5.ФункцияGOSZ
3.6.ФункцияGOSZ 
3.7.ФункцияGOSZ
3.8.ФункцияGOSZ
Передаточная функция ПИ-регулятора
Формируем передаточную функцию регулятора
>>n1=[4.6]; m1=[1]; Kr=tf(n1,m1)
Transfer function:
4.6
>> n2=[1]; m2=[162,0]; Ti=tf(n2,m2)
Transfer function:
1
-----
162 s
Вид передаточной функции регулятора
>>Wr=Kr+Ti
Transfer function:
745.2 s + 1
-----------
162 s
Формируем передаточную функцию объекта управления
n3=[0.36]; m3=[270,1]; Woy=tf(n3,m3)
Transfer function:
0.36
---------
270 s + 1
Найдем переходный процесс для разомкнутой системы функцией (WRS)
>> WRS=Wr*Woy
Transfer function:
268.3 s + 0.36
-----------------
43740 s^2 + 162 s
>>ltiview