

7. Выбор регулятора
7.1 Основы выбора закона регулирования
Для выбора регулятора необходимо знать:
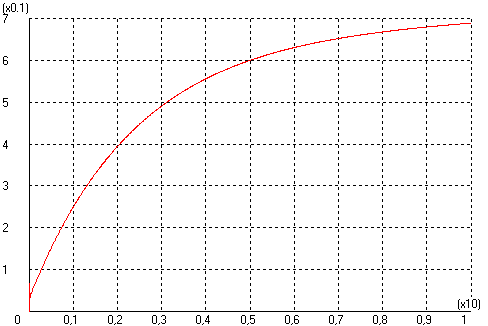
параметры объекта Коб , Т и τ, определяемые по кривой разгона;
максимальное допустимое динамическое отклонение Х1=0,7(единиц регулируемой величины);
допустимое или желаемое перерегулировапие (выбрать один из типовых переходных процессов);
допустимое остаточное отклонение ρ=0,7 (единиц регулируемой величины);
допустимое время регулирования tр=450 с ;
максимально возможные значения возмущения μ(Ув)=20 ,% хода РО.
Допустимые значения параметров определяются технологическим процессом.
Тип регулятора (непрерывный, релейный, импульсный) можно ориентировочно выбрать по величине отношения τ/Т:
τ/Т Регулятор;
<0,2 Релейный;
< 1,0 Непрерывный;
>1,0 Импульсный или непрерывный.
Для регуляторов непрерывного действия необходимо выбрать закон регулирования, используя следующую методику. Рассчитывают динамический коэффициент регулирования
Rд=Х1/Коб μ%=0,7/0,38*20=0,09
для астатических объектов
Rд=Х1Т/τ μ%
7.2 Динамический расчет сар
Расчет САР с серийными регуляторами заключается в определении настроек регуляторов, обеспечивающих заданное качество переходных процессов.
ПИД-регулятор Wпид(р)=Кр(1+1/Тир+Тпрр) коэффициентпередачи регулятора Кр, % хода РО/ед. регулируемой величины; время изодрома
Ти с; время предварения Тпр , с.
Апериодический Кр=0,95/(Коб*τ/Т)=0,95/0,31*(3,2/6)=5,74
Ти=2,4*τ=7,68
Тп=0,4*τ=1,28

При повышении коф. усиления до 50 мы получим.

Так мы можем повышать коэффициент усиления примерно до 900 увеличивая, уменьшая тем самым время перерегулирования. Но после 900 система становится неустойчивой.

Выбор регулятора
Основы выбора закона регулирования
Для выбора регулятора необходимо знать:
параметры объекта Коб , Т и τ, определяемые по кривой разгона;
максимальное допустимое динамическое отклонение Х1=0,7(единиц регулируемой величины);
допустимое или желаемое перерегулировапие (выбрать один из типовых переходных процессов);
допустимое остаточное отклонение ρ=0,7 (единиц регулируемой величины);
допустимое время регулирования tр=450 с ;
максимально возможные значения возмущения μ(Ув)=20 ,% хода РО.
Допустимые значения параметров определяются технологическим процессом.
Тип регулятора (непрерывный, релейный, импульсный) можно ориентировочно выбрать по величине отношения τ/Т:
τ/Т Регулятор;
<0,2 Релейный;
< 1,0 Непрерывный;
>1,0 Импульсный или непрерывный.
Для регуляторов непрерывного действия необходимо выбрать закон регулирования, используя следующую методику. Рассчитывают динамический коэффициент регулирования
Rд=Х1/Коб μ%=0,7/0,38*20=0,09
для астатических объектов
Rд=Х1Т/τ μ%
По графикам рис. 5.1 и по таблице выбирают простейший регулятор, обеспечивающий нужное значение Rд (И-регулятор на астатических объектах не применяют, так как такие системы всегда неустойчивы). П-регулятор
Rд=0,6

Рис. 5.1. Динамические коэффициенты регулирования на статических объектах: а — апериодический процесс; б — процесс с 20%-ным перерегулированием; в — процесс с
min ∫ х2dt;
1 — И-регулятор; 2 — П-регулятор; 3 — ПИ-регулягор; 4 — ПИД-рсгулятор
Затем проверяют по графикам рис. 5.2 для статических объектов и по табл. 5.1 для астатических объектов, обеспечит ли выбранный регулятор заданное время регулирования tp если не обеспечивает, то выбирают более сложный регулятор. Статическую ошибку определяют по рис. 5.8а и, если она больше допустимой, то вместо П-регулятора выбирают ПИ-регулятор.
Можно не определять заранее желательный тип переходного процесса, а задаваться только допустимыми значениями X1, p, tр . Тогда по графикам рис. 5.1, выбирают такой переходный процесс, который возможен при установке наиболее простого регулятора.
|
|
Апериодический процесс |
Колебательный процесс с 20% | ||
|
Регулятор |
регулирования |
перерегулированием | ||
|
|
Rд |
Tр/ τ |
Rд |
Tр/ τ |
|
П |
2,9 |
6 |
1,4 |
8 |
|
ПИ |
1,4 |
14 |
1,3 |
16 |
|
ПИД |
1,3 |
9 |
1,1 |
12 |

Рис.5.2 .Зависимость tр/τ от динамических свойств объекта τ/Т и типовых процессомрегулирования;1—И-регулятор;2—П-регулятор;3—ПИ-регулятор;4—ПИД-регулятор;апериодический процесс;процесс20%-ным перерегулированием; процесс с min ∫х2dt
Tр/ τ=10
После выбора закона регулирования подбирают конструкцию регулятора. Данные по наиболее часто применяемым регуляторам приведены в табл. 6.1. Более полные сведения можно получить в справочниках [7; 8; 14].
Тип регулятора РБА (аналоговый) , 0-5мА , Кр=0,3-50 , Ти=5-500 с , Тд=0-100 с