

1.5.2 Требования к погрешности измерений
Требования к предельной допустимой погрешности измерений в нашей задаче стандартизованы (см. ГОСТ 17353-89 [13]). Они получены исходя из предельной допустимой вероятности ошибки IиIIрода. При этом учтены ограничения, определяемые, с одной стороны, технической возможностью средств измерений (контактные кругломеры), а с другой стороны, требованиями погрешностей контролируемой детали наивысшего класса точности. Класс точности и допускаемая погрешность приведены в таблице 4. В пределах данной таблицыh – это высота над базовой поверхностью узла крепления контролируемой детали, выраженная в миллиметрах. На этой поверхности деталь устанавливается в процессе контроля (см. рисунок 15).
Таблица 4 – Предельные допустимые погрешности кругломеров [12]
|
Класс точности прибора |
Допускаемая погрешность, мкм | |
|
радиальная |
осевая | |
|
1 |
0,05
|
0,08 |
|
2 |
0,12
|
0,15 |
|
Примечание–h , вмм‑ высота щупа над уровнем подставки под деталь (см. рисунок 9). | ||
|
а) |
б) |
|
участки поверхности, имеющей типичные локальные микродефекты: а) точечные, б) в виде короткой риски Рисунок 17 ‑ Увеличенные изображения участков контролируемой поверхности | |


На погрешность измерений, описанных в данном учебном пособии, заметно влияют локальные микродефекты (примеры см. на рисунке 17). Они приводят к уменьшению амплитуды входного сигнала и искажению его формы. Из-за этого измеренные значения информативных параметров имеют большие отклонения от модели, описанной в приложении А (см. рисунок 18). Это приводит к недопустимому увеличению погрешности измерений.
|
|
|
|
а) | |
|
| |
|
б) |
в) |
|
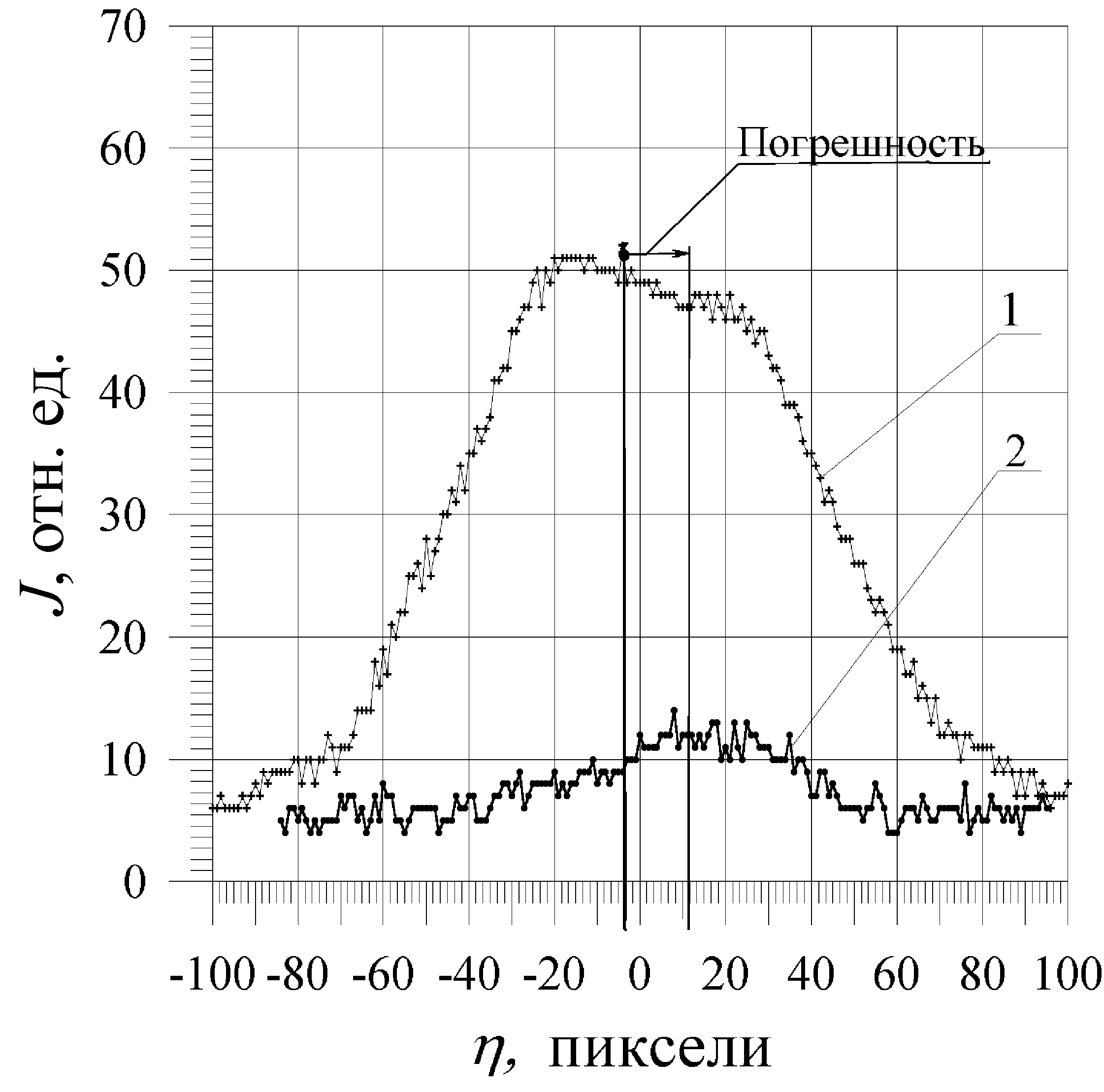
профили 1 – в
горизонтальной плоскости, соответствует
фотографии (а); профиль 2 – полученный
с участка поверхности с локальным
дефектом, соответствует фотографии
(б); J –
уровень сигнала с пикселя; Рисунок 18 ‑ Распределение мощности пучка света на ПЗС-матрице | |


Борьба с этими помехами ведется с помощью адаптивной пороговой фильтрации. Она выполняется в программе сбора данных. Для этого устанавливается относительный пороговый уровень амплитуды входного сигнала, преобразованного в цифровую форму. Сигналы ниже этого уровня отбрасываются, а на их место записываются медианные значения.
Эти значения
определены по близлежащим дискретным
отсчетам
![]() с помощью линейной интерполяции.
Можно экспериментально определить
оптимальную величину указанного уровня.
с помощью линейной интерполяции.
Можно экспериментально определить
оптимальную величину указанного уровня.
Величина относительного уровня в данном случае в программе задается постоянной в процессе измерений. Она может быть изменена пользователем с помощью функциональной клавиши F9, с последующим вводом нового значения с клавиатуры, которое высвечивается в появившемся окне, для контроля правильности ввода.
Программа сбора данных в АС по этому значению автоматически определяет абсолютный уровень фильтрации, который задается в количестве пикселей квантования по уровню оцифрованного входного сигнала.
Отметим, что использовать математическое моделирование в данном случае довольно сложно из-за непараксиальности угла падения зондирующего пучка на контролируемую поверхность и неплоскостности экрана – освещенного участка контролируемой поверхности. В классической теории дифракции (интеграл Кирхгофа), широко используемой для подобных задач, эти условия не предусмотрены. Корректное решение могло бы быть получено с помощью классической электромагнитной теории (уравнения Максвелла).