


35.3. Навигационное обеспечение плавания судна при подходе к побережью
35.3.1. Варианты подхода судна к побережью
Под термином «подход к побережью» понимается этап перехода от плавания в открытом море к прибрежному плаванию с определениями места судна по береговым ориентирам.
Важнейшей навигационной проблемой является обеспечение безопасного выхода судна к заданному участку побережья, его своевременное обнаружение и надежное опознание открывающихся ориентиров. В течение многих столетий огромное число навигационных аварий было связано именно с тем, что судно из-за больших ошибок счисления и промахов судоводителей оказывалось на мели прежде, чем были достоверно опознаны береговые ориентиры и определено место.
Успешное решение задачи подхода к побережью зависит, главным образом, от точности текущих координат судна, характера побережья, условий видимости.
При изучении района плавания особое внимание обращается на характер побережья, характер и пределы распространения навигационных опасностей, наличие приметных ориентиров, обнаруживаемых и надежно опознаваемых на больших расстояниях, вероятные дальности и направления открытия ориентиров, характеристики СНО и РТСНО. Важно заранее выделить ориентиры, схожие по очертаниям, и навигационные огни с одинаковыми или схожими характеристиками, которые могут послужить причиной промаха в их опознании. Непосредственно перед подходом к побережью оцениваются погодные условия, и в первую очередь метеорологическая видимость.
Исходя из радионавигационной обеспеченности района, навигационного оборудования судна, условий плавания, опыта предыдущих переходов оцениваются возможные варианты подхода к побережью и выбирается оптимальный из них. При использовании современных РНС и СРНС,
удовлетворяющих требованиям стандартов точности судовождения ИМО, судно может выйти к побережью на дальность надежного радиолокационного обнаружения с предельной (Р = 0,95) погрешностью текущего места
(35.2)
то есть острота проблемы снимается. Для подхода к побережью выбираются общепринятые кратчайшие курсы, безопасные в навигационном отношении.
При использовании традиционных методов навигации для подхода к побережью обычно практиковалась последовательная смена способов навигационных определений: астрономические методы или РНС дальнего действия → прибрежные РНС (т. «Декка») или КРМКИ → радиолокационные определения → визуальные обсервации. При этом дискретность обсерваций естественным образом
уменьшалась, а точность обсерваций и точность текущего места судна повышались, что и обеспечивало уверенный выход судна на заданный участок побережья.
Худшим вариантом является подход к побережью по счислению после длительного плавания без обсерваций.
Даже малая систематическая погрешность (в учетеα, β, К, Л) приводит к значительным погрешностям счислимого места при длительном переходе.
Анализ записей судовых журналов показывает, что вплоть до установки на судах АПИ СРНС даже крупнотоннажные суда выходили к проливу Ла-Манш из Атлантики с погрешностью счислимого места до 30÷40 миль.
Такие погрешности могут стать причиной промаха в опознавании открывшегося участка берега либо промаха в устранении многозначности при входе в зону действия фазовых РНС (т. «Декка»).
Если судно вынуждено подходить к побережью после длительного плавания, то до подхода необходимо принять все меры для получения надежной обсервации, а если это невозможно →
уточнить место судна хотя бы по одной линии положения. Если полученная линия положения перпендикулярна или почти перпендикулярна побережью, она укажет вероятный участок выхода к побережью. Напротив, линия положения параллельная побережью, укажет, на каком расстоянии от берега находится судно, но останется неизвестным участок выхода судна к побережью. (Следует заметить, что даже поток судов, выходящих из важного судоходного пролива или уходящих от крупного порта, может служить своеобразным ориентиром при подходе к побережью).
При подходе к побережью резко возрастает роль навигационного эхолота как средства для непрерывного контроля глубин и предупреждения об опасности (несовпадение НЭ с НК, неожиданное резкое уменьшение глубин и т.п.). Измеренную глубину (обсервованную изобату) можно использовать

и для уменьшения площади вероятного места судна, когда глубины в районе плавания изменяются достаточно быстро, но не беспорядочно:
1.→ если в районе плавания изобаты параллельны или почти параллельны между собой, то используется общий прием уточнения счислимого места по одной линии положения → обсервованной изобате;
2.→ если в районе плавания изобаты расходятся под углом более 30°, то возможно уточнение счислимого места методом «крюйс-изобаты» по разновременным измерениям глубины
(плавание по счислению  за t между замерами Н вмещается между соответствующими изобатами на карте);
за t между замерами Н вмещается между соответствующими изобатами на карте);
3.→ если в районе имеются отличительные глубины, то при обнаружении этой отличительной глубины площадь вероятного места судна уменьшается до ее размеров.
Все методы уточнения места по глубинам носят ориентировочный характер и являются резервными, а результаты такого уточнения должны проверяться при первой возможности более точными навигационными способами.
35.3.2. Выбор курсов подхода
При большой погрешности текущего места судна курсы подхода к побережью следует выбирать особым образом – так, чтобы обеспечить гарантированное обнаружение, опознание побережья и определение места судна по береговым ориентирам до подхода к навигационным опасностям (рис.
35.1).
(35.3)
где  – предельная радиальная погрешность текущего места судна при подходе к побережью; DОП– расстояние от «приметного» ориентира до опасной изобаты в секторе вероятных курсов подхода к побережью;
– предельная радиальная погрешность текущего места судна при подходе к побережью; DОП– расстояние от «приметного» ориентира до опасной изобаты в секторе вероятных курсов подхода к побережью;
DОМС , DЗН – расстояния, на которых должна обеспечиваться возможность определения места судна по данному ориентиру и возможность надежного опознания ориентира соответственно;
ДОБН – требуемая дальность обнаружения ориентира при данных условиях плавания.
Рис. 35.1. Выбор курса подхода к берегу при большой погрешности в месте судна
При отсутствии особых рекомендаций, в общем случае, для подхода к побережью выбирается приглубый участок, чистый от подводных опасностей, где имеется характерный, далеко видимый ориентир, надежно опознаваемый на экране РЛС. Курс судна прокладывается прямо на такой ориентир и по возможности перпендикулярно к изобатам. После обнаружения и опознавания такого
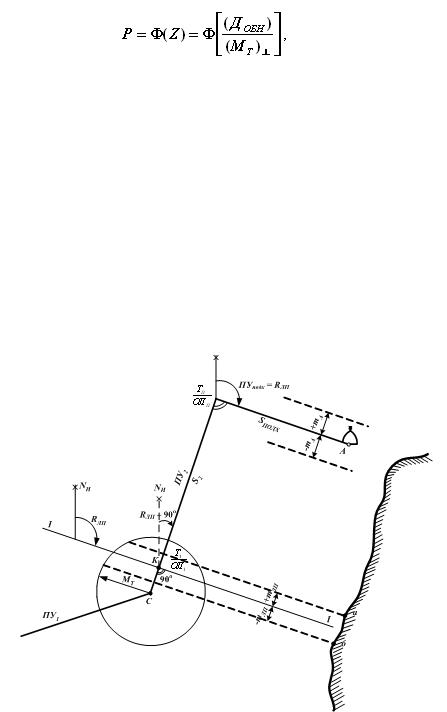
ориентира относительно него опознается вся открывающаяся обстановка и определяется место судна.
При этом важнейшей задачей является – обеспечение выхода судна к побережью в пределах
надежной дальности обнаружения «приемного» ориентира (ДОБН). Вероятность обнаружения такого ориентира определяется функцией Лапласа(см. табл. 18.1):
(35.4)
по табл. 1б «МТ-75» (с. 61) или по табл. 4.7 «МТ-2000» (с. 395).
Следуя принципу «Считай себя ближе к опасности», СКП текущего места судна по направлению, перпендикулярному курсу (МТ ) , можно принимать равной радиальной (круговой) СКП текущего
места, то есть (МТ) |
|
≈ МТ. Так, |
если М |
Т |
≤ 1/3 (Д |
), то вероятность Р = 0,997, то есть обнаружение |
|
|
|
|
ОБН |
||||
ориентира |
практически гарантируется. |
|
|
|
|||
|
|
|
|
|
|
|
|
При больших погрешностях текущего места, не гарантирующих попадание судна в зону видимости «приемного» ориентира, курс судна прокладывается таким образом, чтобы выйти к побережью в заведомо определенной стороне (справа или слева) от заданного ориентира и,
обнаружив побережье, уверенно поворачивать в сторону ориентира.
Этот прием вполне применим при подходе к однообразному побережью с редкими ориентирами.
При отсутствии возможности определения места судна даже единственная линия положения позволяет не только уменьшить площадь вероятного места судна, но и обеспечить более точный выход в заданную точку (точку А). Для этого необходимо (рис. 35.2):
Рис. 35.2. Выбор курса подхода при плавании судна по счислению
1.→ проложить обсервованную линию положения I-I на путевой карте, снять ее направление RЛП, перенести счислимое место судна (т. С) в определяющую точку К на линию положения;
2.→ проложить путь подхода к заданной точке параллельно полученной линии положения
ПУПОДХ = RЛП;
3.→ кратчайшим и безопасным путем ПУ2 = RЛП ± 90° выйти на линию курса подхода: tП=S2 / V;
TП = Т1 + tП; РОЛ=S2 / KЛ ; ОЛП = ОЛ1 + РОЛ .
4.→ в момент ТП/ОЛП лечь на ПУПОДХ = RЛП и следовать им до выхода в заданную точку (т. А).
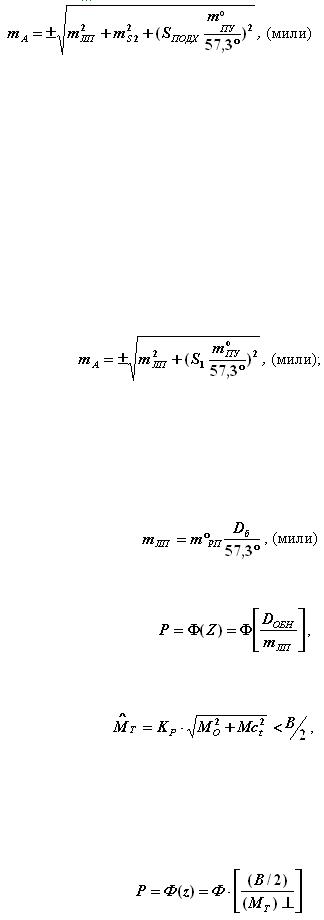
Ширина полосы выхода (± mА) оценивается формулой:
|
|
mЛП |
|
|
|
|
|
|
|
|
Т1, |
|
(35.5) |
где |
|
– |
СКП |
обсервованной |
линии |
положения |
на |
(мили); |
|||||
mS2 |
|
– |
|
СКП |
плавания |
|
судна |
по |
|
ПУ2, |
|
(мили); |
|
mПУ |
– |
СКП |
в |
путевом |
угле |
судна |
при |
плавании |
курсом |
подхода, |
(°); |
||
SПОДХ – плавание судна курсом подхода, (мили). |
|
|
|
|
|
|
|
||||||
Чем сложнее условия, ниже точность линии положения, больше S2 и SПОДХ, тем шире полоса выхода в назначенную точку (т. А), ограниченную ±mА.
Плавание может осуществляться и непосредственно по обсервованной линии положения при использовании ее в качестве ведущей. При этом различают два случая, навигационные возможности которых также резко различны:
1.→ Если обсервованная линия положения получена на основе измерений, которые нельзя повторить (ВЛП), то она способна вывести судно лишь на произвольный участок побережья а-б (рис. 35.2), случайно оказавшийся на ее продолжении, а ширина полосы выхода:
(35.6)
2.→ Если же данный навигационный параметр возможно измерять (контролировать) непрерывно или, по крайней мере, достаточно часто, то можно выбрать такую ведущую изолинию, следуя по которой судно выйдет в заданную точку.
Проложив, например, линию ведущего радиопеленга на КРМК через приемный буй, можно, используя радиопеленгатор, вывести судно на буй с СКП:
|
Dб |
|
|
|
КРМКА |
|
|
|
(35.7) |
где |
– |
расстояние |
от |
до |
приемного |
буя, |
(мили). |
Вероятность обнаружения приемного буя:
(35.8)
Курс судна прокладывается на середину полосы движения СРД только в том случае, если  не более ½ ширины полосы, то есть если:
не более ½ ширины полосы, то есть если:
(35.9)
В противном случае курс прокладывается на S= от границы зоны разделения СРД с тем, чтобы исключить случайный заход судна в зону разделения из-за погрешностей счисления. При больших возможных погрешностях текущего места судна, может быть, более благоразумно прокладывать курс в стороне от СРД, на достаточном расстоянии от нее.
от границы зоны разделения СРД с тем, чтобы исключить случайный заход судна в зону разделения из-за погрешностей счисления. При больших возможных погрешностях текущего места судна, может быть, более благоразумно прокладывать курс в стороне от СРД, на достаточном расстоянии от нее.
При прокладке курса на середину полосы движения СРД вероятность попадания судна в полосу описывается функцией Лапласа:
(35.10)
значит, если (МТ)≤ В/6, то Р = 0,997, т.е. попадание в полосу практически гарантировано.