

Решение: 1) |
Из табл. 18.1 по аргументу Р = 0,866 определяем Z = 1,5. |
2) |
Вычисляем искомые пределы погрешности |
|
υD = 1,5 · 0,5 = ±0,75кб. |
Задача 5: Определить вероятность того, что действительное расстояние до ориентира не выйдет за
пределы 105÷108кб, если среднее арифметическое (вероятнейшее) расстояние до ориентира D = 106кб., а СКП измерения расстояния mD = ±2 кб.
Решение: 1) Рассчитываем аргументы функции Лапласа для случайных величин:
 и
и
2)Из табл.18.1 по аргументам Z1 и Z2 выбираем значения вероятностей: Р1 = 0,383 и Р2 = 0,683
3)Вычисляем искомую вероятность Р = 0,5 (0,683 + 0,383) = 0,533. (т.к. «Z1» величина отрицательная, то функции Лапласа складываются).
18.2. Оценка точности счисления координат судна
Современный уровень штурманской техники все еще не позволяет перейти к обсервационному способу судовождения, то есть судовождению на основе непрерывного определения места судна по внешним ориентирам. Поэтому основой выработки текущих (счислимых) координат места судна является счисление его пути, на основе которого получают (графически, аналитически, графоаналитически) текущие координаты (счислимое место судна) на любой момент времени.
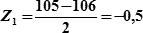
Счислимое место судна на любой момент времени определяется точкой пересечения двух линий
(рис. 18.2.):
•линии пути судна;
•дуги окружности, проведенной из исходной точки плавания, радиусом, равным пройденному судном расстоянию.
Рис. 18.2. Счислимое место судна
Врезультате неточного учета (или их изменения со временем) таких элементов, как поправка
курсоуказателя (ΔК), величина угла дрейфа (α°), направление учитываемого течения (КТ) и его скорости (υТ) и пр. – путевой угол (ПУ) будет отличаться от расчетного на некоторую величину (ΔПУ).
Врезультате же неточного учета (или их изменения со временем) таких элементов, как поправка
лага (Δ Л%), скорость учитываемого течения (υТ) и пр. – пройденное судном расстояние (SЛ) будет отличаться от расчетного на некоторую величину (ΔS).
Учтя все погрешности, влияющие на путевой угол и все погрешности, влияющие на пройденное судном расстояние (см. табл. 12.1.), можно получить СКП путевого угла (mПУ) и СКП пройденного судном расстояния (mS).
Под воздействием этих погрешностей (mПУ и mS) счислимое место судна на какой-то момент времени Т1 (рис. 18.3) будет располагаться не в конкретной точке (т. а), а в пределах некоторой площади (на рис. 18.3 – заштриховано), но где именно – заранее не известно.
Рис. 18.3. Погрешность счисления пути судна
Это объясняется тем, что величина и знак абсолютного изменения путевого угла ( ПУ) и пройденного расстояния (ΔS) проявляются как случайные величины.
Ссылаясь на теорию погрешности можно оценить вероятность нахождения счислимого места на время Т1 в «заштрихованной» (рис. 18.3) фигуре погрешности величиной Р = 46% (0,46).
Если в эту фигуру вписать эллипс на полуосях
(18.7)
то вероятность нахождения счислимого места на время Т1 в эллипсе оценится в Р ≈ 39% (0,39). → рис.
18.11.
В практике судовождения точность места принято оценивать радиальной или круговой
среднеквадратической погрешностью
(18.8)
Зная значение М из т. а проведем окружность радиусом R = М . Вероятность нахождения счислимого места в круге, радиусом R = M, составит 63÷68% (0,63÷0,68) в зависимости от соотношения полуосей эллипса (а и в).
Как видно из рис. 18.3 величина радиуса R = M будет увеличиваться постоянно с увеличением пройденного судном расстояния (S).
На основании многолетних наблюдений получены следующие приближенные значения радиуса R
=M для нормальных условий плавания в зависимости от пройденного расстояния:
•без ветра и течения: М ≈ 0,02·S → если S = 100 миль, то М = 2 мили;
•с учетом дрейфа от ветра: М ≈ 0,03·S → если S = 100 миль, то М = 3 мили;
•с учетом дрейфа от ветра и течения: М ≈ 0,03÷0,07·S → если S = 100 миль, то М = 3÷7 миль.
Для конкретного проекта (типа) судна для конкретного района плавания (Черное море, Средиземное море и др.) нужно знать значение радиальной СКП счисления (МС), чтобы иметь возможность в любое время оценить навигационную безопасность плавания.
Величина МС зависит от пройденного судном расстояния, то есть от времени плавания по счислению. Осталось выяснить «скорость» увеличения МС, то есть знать величину – коэффициента точности счисления (КС).

Вероятность радиальной погрешности (из табл. 1в «МТ-75» и табл. 4.13 «МТ-2000»)
Таблица 18.2.
КР = |
|
|
Отношение полуосей эллипса погрешностей е = в/а |
|
|
||||||
0,0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,1 |
0,080 |
0,045 |
0,025 |
0,018 |
0,014 |
0,012 |
0,011 |
0,011 |
0,010 |
0,010 |
0,010 |
0,2 |
159 |
135 |
092 |
068 |
056 |
048 |
044 |
042 |
040 |
039 |
039 |
0,3 |
236 |
223 |
179 |
142 |
119 |
105 |
096 |
091 |
088 |
086 |
086 |
0,4 |
311 |
303 |
270 |
229 |
198 |
177 |
164 |
156 |
151 |
149 |
148 |
0,5 |
383 |
377 |
356 |
319 |
285 |
260 |
243 |
232 |
225 |
222 |
221 |
0,6 |
452 |
448 |
434 |
406 |
374 |
347 |
328 |
315 |
307 |
304 |
302 |
0,7 |
516 |
514 |
505 |
486 |
459 |
434 |
415 |
401 |
393 |
389 |
387 |
0,8 |
576 |
575 |
570 |
558 |
539 |
517 |
499 |
487 |
478 |
474 |
473 |
0,9 |
632 |
631 |
629 |
623 |
610 |
594 |
579 |
568 |
560 |
556 |
555 |
1,0 |
0,683 |
0,683 |
0,682 |
0,680 |
0,674 |
0,663 |
0,652 |
0,643 |
0,636 |
0,633 |
0,632 |
1,1 |
729 |
729 |
730 |
731 |
729 |
723 |
716 |
710 |
705 |
703 |
702 |
1,2 |
770 |
771 |
772 |
775 |
776 |
775 |
772 |
768 |
765 |
764 |
763 |
1,3 |
806 |
807 |
810 |
814 |
817 |
819 |
819 |
818 |
817 |
816 |
815 |
1,4 |
838 |
840 |
842 |
847 |
852 |
856 |
858 |
859 |
859 |
859 |
859 |
1,5 |
866 |
868 |
870 |
875 |
881 |
886 |
890 |
892 |
894 |
894 |
895 |
1,6 |
890 |
891 |
895 |
899 |
905 |
911 |
916 |
919 |
921 |
922 |
923 |
1,7 |
911 |
912 |
915 |
919 |
925 |
931 |
936 |
940 |
943 |
944 |
944 |
1,8 |
928 |
929 |
932 |
936 |
942 |
947 |
952 |
956 |
959 |
960 |
961 |
1,9 |
943 |
944 |
946 |
950 |
955 |
960 |
965 |
968 |
971 |
972 |
973 |
2,0 |
0,954 |
0,955 |
0,958 |
0,961 |
0,965 |
0,970 |
0,974 |
0,978 |
0,980 |
0,981 |
0,982 |
2,1 |
964 |
965 |
967 |
970 |
974 |
978 |
981 |
984 |
986 |
987 |
988 |
2,2 |
972 |
973 |
975 |
977 |
980 |
984 |
987 |
989 |
991 |
992 |
992 |
2,3 |
979 |
979 |
981 |
983 |
985 |
988 |
990 |
992 |
994 |
995 |
995 |
2,4 |
984 |
984 |
985 |
987 |
989 |
991 |
993 |
995 |
996 |
997 |
997 |
2,5 |
988 |
988 |
989 |
990 |
992 |
994 |
995 |
997 |
998 |
998 |
998 |
2,6 |
991 |
991 |
992 |
993 |
994 |
996 |
997 |
998 |
998 |
999 |
999 |
2,7 |
993 |
993 |
994 |
995 |
996 |
997 |
998 |
999 |
999 |
999 |
999 |
2,8 |
995 |
995 |
996 |
996 |
997 |
998 |
999 |
999 |
999 |
999 |
1,000 |
2,9 |
996 |
996 |
997 |
997 |
998 |
999 |
999 |
999 |
1,000 |
1,000 |
1,000 |
3,0 |
0,997 |
0,997 |
0,998 |
0,998 |
0,999 |
0,999 |
0,999 |
1,000 |
1,000 |
1,000 |
1,000 |
КР = RР / М → коэффициент (нормированная радиальная погрешность), равный заданной радиальной погрешности (RР) в долях радиальной СКП места (М).
Если «а» и «в» неизвестны, то выборки по в/а = 1.
Задача: Определить вероятность нахождения места судна в круге радиуса  и круге радиуса RР = 2,9 мили, если полуоси эллипса погрешностей: а = 1,8 мили, в = 0,7 мили.
и круге радиуса RР = 2,9 мили, если полуоси эллипса погрешностей: а = 1,8 мили, в = 0,7 мили.
Решение: 1) рассчитываем отношение полуосей эллипса: e = b/a = 0,7/1,8 = 0,4.
2)вычисляем радиальную СКП места судна:
3)из табл. 18.2 по КР = 1 (для радиальной СКП RР = М) и е = 0,4 выбираем Р = 0,674 (67,4%)
4)из табл. 18.2 по 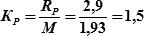 и е = 0,4 выбираем Р = 0,881 (88,1%).
и е = 0,4 выбираем Р = 0,881 (88,1%).

Вероятность радиальной погрешности при круговом распределении мест (из табл. 4.15 «МТ-2000»)
Таблица 18.3.
КР = |
0,00 |
0,01 |
0,02 |
0,03 |
0,04 |
0,05 |
0,06 |
0,07 |
0,08 |
0,09 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,1 |
0,010 |
0,012 |
0,014 |
0,017 |
0,019 |
0,022 |
0,025 |
0,028 |
0,032 |
0,035 |
0,2 |
039 |
043 |
047 |
052 |
056 |
061 |
065 |
070 |
075 |
081 |
0,3 |
086 |
092 |
097 |
103 |
109 |
115 |
122 |
128 |
134 |
141 |
0,4 |
148 |
155 |
162 |
169 |
176 |
183 |
191 |
198 |
206 |
213 |
0,5 |
221 |
229 |
237 |
245 |
253 |
261 |
269 |
277 |
286 |
294 |
0,6 |
302 |
311 |
319 |
328 |
336 |
345 |
353 |
362 |
370 |
379 |
0,7 |
387 |
396 |
405 |
413 |
422 |
430 |
439 |
447 |
456 |
464 |
0,8 |
473 |
481 |
490 |
499 |
506 |
514 |
523 |
531 |
539 |
547 |
0,9 |
555 |
563 |
571 |
579 |
587 |
594 |
602 |
610 |
617 |
625 |
1,0 |
0,632 |
0,639 |
0,647 |
0,654 |
0,661 |
0,668 |
0,675 |
0,682 |
0,689 |
0,695 |
1,1 |
702 |
708 |
715 |
721 |
727 |
734 |
740 |
746 |
752 |
757 |
1,2 |
763 |
769 |
774 |
780 |
785 |
790 |
796 |
801 |
806 |
811 |
1,3 |
815 |
820 |
825 |
829 |
834 |
838 |
843 |
847 |
851 |
855 |
1,4 |
859 |
863 |
867 |
871 |
874 |
878 |
881 |
885 |
888 |
891 |
1,5 |
895 |
898 |
901 |
904 |
907 |
910 |
912 |
915 |
918 |
920 |
1,6 |
923 |
925 |
928 |
930 |
932 |
934 |
936 |
939 |
941 |
943 |
1,7 |
944 |
946 |
948 |
950 |
952 |
953 |
955 |
956 |
958 |
959 |
1,8 |
961 |
962 |
964 |
965 |
966 |
968 |
969 |
970 |
971 |
972 |
1,9 |
973 |
974 |
975 |
976 |
977 |
978 |
979 |
979 |
980 |
981 |
2,0 |
0,982 |
0,982 |
0,983 |
0,984 |
0,984 |
0,985 |
0,986 |
0,986 |
0,987 |
0,987 |
2,1 |
988 |
988 |
989 |
989 |
990 |
990 |
991 |
991 |
991 |
992 |
2,2 |
992 |
992 |
993 |
993 |
993 |
994 |
994 |
994 |
994 |
995 |
2,3 |
995 |
995 |
995 |
996 |
996 |
996 |
996 |
996 |
997 |
997 |
2,4 |
997 |
997 |
997 |
997 |
997 |
998 |
998 |
998 |
998 |
998 |
2,5 |
998 |
998 |
998 |
998 |
998 |
998 |
999 |
999 |
999 |
999 |
2,6 |
999 |
999 |
999 |
999 |
999 |
999 |
999 |
999 |
999 |
999 |
2,7 |
999 |
999 |
999 |
999 |
999 |
999 |
1,000 |
1,000 |
1,000 |
1,000 |
2,8 |
1,000 |
1,000 |
1,000 |
1,000 |
1,000 |
1,000 |
1,000 |
1,000 |
1,000 |
1,000 |
КР =  – отношение заданной радиальной погрешности (RР) к радиальной СКП места (М) при b/a =
– отношение заданной радиальной погрешности (RР) к радиальной СКП места (М) при b/a =
1.
Задача 1: Определить вероятность нахождения действительного места судна в круге радиуса RР = 1,2
мили, если радиальная СКП при круговом распределении мест судна М = 0,6 мили.
Решение: |
|
из табл. 18.3 по коэффициенту |
выбираем значение Р = 0,982 (98,2%). |
Задача 2: Определить радиальную погрешность для вероятности Рзад = 0,95 (95%), если радиальная
СКП при круговом распределении мест судна М = 0,8 мили.
Решение: из табл. 18.3 по Рзад = 0,95 (95%) выбираем КР = 1,73 следовательно: R0,95 = 1,73 · 0,8 мили =
1,4 мили.