

2.2.2. Построение классификации для нормального распределения.
Классификация объекта для двух нормальных распределений с равными матрицами ковариации и разными математическими ожиданиями:
![]() ,
,
![]()
![]()


![]()
 ,
матрица ковариации
,
матрица ковариации
где
![]() ковариация компонентi
и j;
ковариация компонентi
и j;
![]() -
дисперсия компоненты i
-
дисперсия компоненты i
Матрица может быть определена следующим образом:
![]()
Если взять f(x) = const и выбрать const таким образом, чтобы она была маленькой, то
![]()
 -
определяет эллипсы в многомерном
пространстве, дающие описание
-
определяет эллипсы в многомерном
пространстве, дающие описание
многомерной плотности с помощью линий равной плотности вероятности.
![]()
Как строится правило решения для классификации двух классов?
Предполагается, что есть 2 класса.
![]()
![]()
![]()
![]() ,
,
где К- порог.
Решение строится на основе функции правдоподобия:
![]() ;
;
 для
удобства работы прологарифмируем:
для
удобства работы прологарифмируем:
![]()
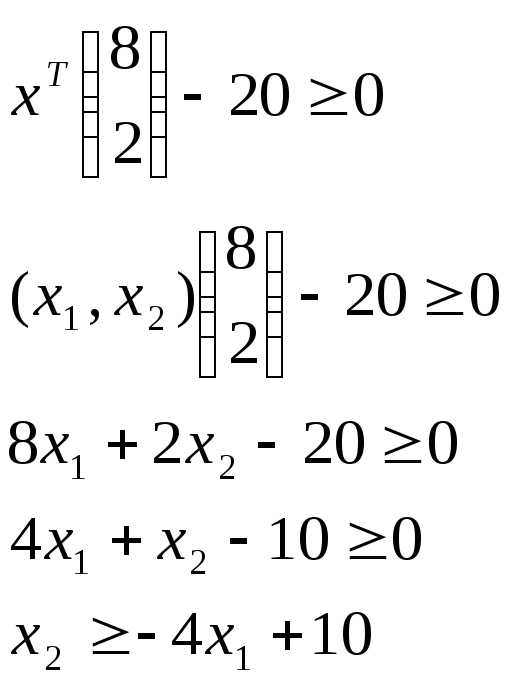
Преобразовав выражение, получим правило в следующем виде:
![]() -
это уравнение линейной дискриминантной
функции, полученной на основе Байесовского
решающего правила.
-
это уравнение линейной дискриминантной
функции, полученной на основе Байесовского
решающего правила.
![]()
Для дальнейшего анализа будем считать:
![]()
C (2/1) =C (1/2)
![]()
![]() -
простейшая дискриминантная функция
-
простейшая дискриминантная функция
Пусть
![]() ,
размерность пространства возьмем равную
2 . Тогда получаем следующее правило
решения
,
размерность пространства возьмем равную
2 . Тогда получаем следующее правило
решения
![]()


W – весовой вектор
Области
классов представляют собой сферы.
Положение
этой плоскости определяется вектором
W.
Решающая плоскость перпендикулярна
вектору
![]()
Уравнение решающей плоскости:
![]()
![]() -
это уравнение сферы можно свести к
выражению
-
это уравнение сферы можно свести к
выражению
![]()

Утверждение:
Для
данной решающей функции вектор
![]() лежит ровно на середине вектора
лежит ровно на середине вектора![]()
Таким образом, в случаях
a)
![]()
b)
![]()
решение выглядит следующим образом:
![]()
![]()
Рассмотрим случай, когда матрица не является единичной: нужно получить уравнение для решающей функции:
2.2.3.Числовые примеры
Вариант 1

![]()
![]()
Вариант 2
![]()
![]()
![]()
![]()
Решение варианта 1:





![]()
![]()





![]()


![]()

![]()
Решение варианта 2:






![]()
4

 3
3
![]()



![]() 1
1
 1
2 3 4
1
2 3 4 ![]()
Найдем уравнение эллипса равной плотности вероятностей для варианта 2.
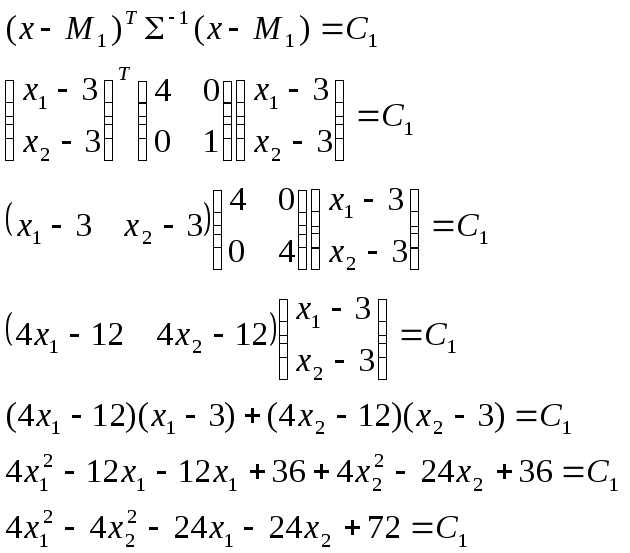
в общем виде:

соответственно полуоси:
![]()
2.2.4. Оценка качества классификации
Рассмотрим
случайную величину
![]() ,
являющейся значением решающей функции.
Решение принимается сравнением U
с порогом
,
являющейся значением решающей функции.
Решение принимается сравнением U
с порогом
![]()
![]()
![]() В
исходной постановке задачи мы
рассматривали многомерное пространство:
В
исходной постановке задачи мы
рассматривали многомерное пространство:
![]()

![]()
Так как решение принимается на основе одномерной величины U, то можно считать, что
задача
классификации сводится к редукции
пространства, то есть от n-мерного
пространства мы переходим к пространству
![]()
![]() Что
мы имеем: в исходно пространстве условные
плотности – многомерные нормальные
распределения:
Что
мы имеем: в исходно пространстве условные
плотности – многомерные нормальные
распределения:
![]()
![]()
C




![]()

![]()













А в редуцированном пространстве переходим к одномерным условным нормальным распределения величины U.
![]()
то есть каждому многомерному распределению соответствует одномерное.
![]() -
это пороговое значение, то есть проблему
принятия решения мы сводим к одномерной
задаче. Ошибки классификации могут быть
определены через распределения U.
-
это пороговое значение, то есть проблему
принятия решения мы сводим к одномерной
задаче. Ошибки классификации могут быть
определены через распределения U.
![]() (принимаем
решение 1 при верности решения 2)
(принимаем
решение 1 при верности решения 2)
![]() ,
,
где C – порог
Прямое вычисление ошибок в многомерном пространстве приводит к техническим трудностям, поэтому и применяется редукция пространства.
Основная
задача состоит в поиске распределений
плотности вероятностей значений
решающей функции
![]() .
.
![]() в
конечном итоге, это линейная комбинация
нормально распределенных величин, она
сама – нормальная величина. Найдем
условные математические ожидании и
дисперсии U
по классам
в
конечном итоге, это линейная комбинация
нормально распределенных величин, она
сама – нормальная величина. Найдем
условные математические ожидании и
дисперсии U
по классам

, где
![]() -
расстояние Махаланобиса.
-
расстояние Махаланобиса.
Аналогично
мы должны посчитать
![]() :
:
![]()

Мы нашли математические ожидания ошибок.
Следующая задача состоит в нахождении дисперсий данной величины:
![]()
В предположении равенства матриц ковариации в исходном пространстве, получаем, что дисперсии U также равны по классам.
Здесь вывод достаточно длинный. Так как матрицы ковариации одинаковые, то можно сделать следующий вывод:
DU1 = DU2
M{(V - MV)2} = M{(V - MV)T(V - MV)}
D = (M1 - M2)Т-1(M1 - M2) = = 2 ,
где - расстояние Махаланобиса.
U может принадлежать двум нормальным распределениям:
U1
N(![]() ,
);
,
);
U2
N(-![]() ,
).
,
).
Эти распределения представлены на рисунке.
|
|
MU1
=
MU2
= - MU1 – MU2 =
|

- это не что иное, как обобщенное расстояние между классами в N-мерном пространстве.
= (M1 - M2)T -1(M1-M2)
Смысл этого расстояния довольно простой:
Если = I, то
=
(M1
-
M2)T(M1
-
M2)
=
![]() (M1i
-
M2i)2
= ║M1
-
M2║2
= d2
(M1i
-
M2i)2
= ║M1
-
M2║2
= d2
Если матрица диагональная, но с разными , то:
-


12 0
=
.
0 n2


2
- сумма взвешенных расстояний по каждой координате
=

M1i - M2i
i
хорошо описывает статистическую природу данных.
=
XT
-1(M1
-
M2)
-
![]() (M1
+
M2)T
-1(M1
-
M2)
(M1
+
M2)T
-1(M1
-
M2)
M{U/1}
=
![]()
= (M1
-
M2)T
-1(M1
-
M2)
= (M1
-
M2)T
-1(M1
-
M2)
M{U/2}
= -![]()
D[U] = M[(U - MU)2] = M[(U - MU)T(U - MU)]
D[U] =
n2 =
Нужно построить вероятности ошибок классификации.
-
U C C = ln K K =
q2C(1|2)
q1C(2|1)
N(![]() ,
) N(-
,
) N(-![]() ,
)
,
)

P = q1 P(2|1) + q2 P(1|2) - вероятность полной ошибки
P(2|1)
=
![]()
![]() exp[
exp[![]() ]dU
]dU
f(U|1)
=
![]() exp[
exp[ ]
]
P(2|1)
=
![]()
![]() exp[
exp[![]()
 ]dU
=
]dU
=
![]()
![]()
![]() dt
=
dt
=
=
Ф(![]() )
)
P(1|2)
=
![]()
![]() exp[
exp[![]()
 ]dU
=
]dU
=
![]()
![]()
![]() dt
=
dt
=
=
1 - Ф(![]() ),
где Ф(x)
– интеграл ошибок Гаусса.
),
где Ф(x)
– интеграл ошибок Гаусса.
Полная ошибка распишется следующим образом:
Pош
= q1
Ф(![]() )
+ q2
[1 - Ф(
)
+ q2
[1 - Ф(![]() ))]
))]
Рассмотрим свойства полной ошибки:
C
= ln
K
= ln
![]() = 0
= 0
q1 = q2 = 0.5
C(1|2) = C(2|1)
Pош
= 0.5 Ф(![]() )
+ 0.5 [1
- Ф(
)
+ 0.5 [1
- Ф(![]() )]
=
)]
=
=
0.5 [1
- Ф(![]() )]
+ 0.5 [1
- Ф(
)]
+ 0.5 [1
- Ф(![]() )]
= 1 - Ф(
)]
= 1 - Ф(![]() )
)
Так как Ф(-х) = 1 – Ф(х).
Вернемся к рассмотрению :

Пусть

=
(M1
-
M2)T
-1(M1-M2)
=

Если
i2
= 1, тогда
=
![]() (M1i
-
M2i)2
= d2
(M1i
-
M2i)2
= d2

Ошибка зависит от обобщенного расстояния d2, чем больше d2, тем меньше ошибка (так как расстояние между распределениями увеличивается).
-
M1i - M2i
=
- это взвешенное нормальное распределение
i
Если = const, тогда будет представлять собой следующее:
=
![]() 2
= n
2
2
= n
2
d
=
![]()
Pош
= 1 – Ф(![]() )
)

Пусть мы хотим сделать вероятность ошибки 0,005 = 0,5%.
Pош
= 1 – Ф(x),
где х =
![]()
По таблице можно найти данную величину:
-
 =
2,6
=
2,6n = [
 ]
]
= 0.1 – это означает, что классы сильно пересекаются.
n
= [![]() ]
= 2700 для
= 0,1
]
= 2700 для
= 0,1
Для
= 5 n
= [![]() ]
= 2
]
= 2
Подбирая размерность пространства всегда можно добиться уменьшения ошибок (с ростом размерности ошибка падает).

(X|2)
P1пр
=
![]() f(U|1)dU
f(U|1)dU
Pпр2
=
![]() f(U|2)dU
f(U|2)dU
Pпрср = q1 P1пр + q2 P2пр