

СМиНСК
.pdf49.Как строится решение задачи ОПК в случае выхода на границу допустимой области варьирования параметров?
50.Сущность поисковых методов решения задач ОПК.
51.Понятие о принципе декомпозиции и многоуровневой оптимизация.
52.Как выполняется и как влияет на результаты решения задачи ОПК аппроксимация параметров состояния и ограничений?
53.Понятие о многокритериальной оптимизации.
54.Что такое регулирование напряженно-деформирован- ного состояния (НДС) сооружения (конструкции)?
55.Что называется регулируемыми параметрами и регуляторами?
56.Критерий и условия (уравнения) регулирования; каковы взаимосвязь и различия между ними?
57.Основные виды регулируемых параметров, регуляторов и критериев регулирования.
58.Какие регуляторы не могут быть использованы для изменения усилий в статически определимых системах?
59.По каким признакам классифицируются задачи регулирования НДС конструкций?
60.Как проверяется корректность постановки задачи регулирования?
61.Каким условиям должны удовлетворять количества регуляторов и регулируемых параметров?
62.Какие требования предъявляются к регуляторам?
63.Каковы признаки независимости регуляторов? Каким может получиться решение задачи при использовании зависимых регуляторов?
64.Как формируется система уравнений для определения искомых значений регуляторов в линейных задачах регулирования?
65.Как определяются силовые факторы в системе, получающиеся в результате регулирования?
49

Задача 11. Расчет системы с конечным числом степеней свободы на собственные и вынужденные колебания
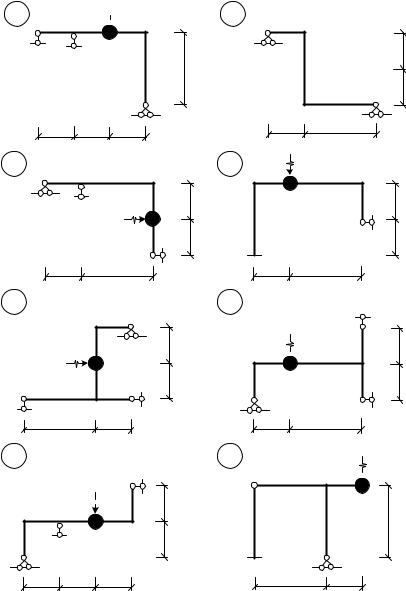
Задание: Для плоской системы с невесомыми стержнями, выбранной согласно шифру (рис. 9), требуется:
а) определить число степеней свободы массы системы; б) выполнить расчет на собственные колебания и опреде-
лить их угловые и технические частоты, изобразить главные формы собственных колебаний системы;
в) выполнить расчет на установившиеся вынужденные колебания при заданной вибрационной нагрузке F (t) = F sin ωF t
(частоту вынужденных колебаний ωF принять равной 0,9 ми-
нимальной частоты собственных колебаний). По расчету на вынужденные колебания построить эпюру амплитуд динамических изгибающих моментов;
г) построить эпюру изгибающих моментов от статического действия веса сосредоточенной массы;
д) построить эпюру расчетных изгибающих моментов; е) построить эпюры поперечных и продольных сил, соот-
ветствующие расчетной эпюре изгибающих моментов при sin ωF t = +1 .
Исходные данные выбираются в соответствии с шифром из табл. 10.
Таблица 10
Первая цифра шифра |
,aм |
,mт |
Вторая цифра шифра |
,FкН |
Третья цифра шифра |
,EI кН·м |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
3,0 |
2,0 |
1 |
8 |
1 |
25000 |
2 |
2,5 |
1,6 |
2 |
6 |
2 |
24000 |
3 |
2,0 |
1,2 |
3 |
4 |
3 |
22000 |
4 |
2,5 |
1,8 |
4 |
5 |
4 |
23000 |
5 |
3,0 |
2,2 |
5 |
7 |
5 |
26000 |
6 |
3,5 |
2,8 |
6 |
10 |
6 |
24000 |
7 |
3,0 |
2,4 |
7 |
9 |
7 |
25000 |
8 |
2,5 |
2,0 |
8 |
7 |
8 |
22000 |
9 |
2,0 |
1,6 |
9 |
5 |
9 |
20000 |
0 |
3,5 |
2,6 |
0 |
9 |
0 |
26000 |
50

МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Для определения частот собственных колебаний рамы с двумя степенями свободы массы необходимо:
1. Записать систему двух уравнений свободных колебаний с двумя неизвестными инерционными силами J1 и J2, действующими в направлениях возможных перемещений массы:
|
|
|
- |
1 |
|
|
|
× J1 |
+ δ12 × J2 = 0, |
||||||
|
δ11 |
|
|
|
|
|
|||||||||
m × |
ω |
2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
δ21 |
× J1 |
+ |
δ22 |
- |
|
|
|
|
× J2 |
= 0. |
|||||
m × ω |
2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2. Построить единичные эпюры изгибающих моментов М1, М2 от действия сил инерции J1 = 1, J2 = 1 и вычислить коэффициенты уравнений:
δ11 = ∑ ∫ |
M12 |
ds; |
δ12 = δ21 = ∑∫ |
M1 × M 2 |
ds; |
δ22 = ∑∫ |
M 22 |
ds. |
EI |
EI |
EI |
3. Подставить найденные коэффициенты в уравнения и умножить оба уравнения на EI:
|
δ11* |
- |
EI |
|
|
× J1 + δ12* × J2 = 0, |
|
||||||
2 |
|
||||||||||||
|
|
|
m × ω |
|
|
|
|
* |
= δik × EI. |
||||
|
|
|
|
|
|
|
|
|
|
|
где δik |
||
δ*21 × J1 |
+ |
δ*22 |
- |
EI |
|
× J2 = 0, |
|
||||||
m × ω |
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
4. Обозначить λ = |
|
EI |
|
и подставить в уравнения: |
|||||||||
m × ω2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
(δ11* - λ)× J1 + δ12* × J2 = 0, |
|
||||||||
|
|
|
|
|
|
|
|
|
(δ*22 - λ)× J2 = 0. |
|
|||
|
|
|
|
δ*21 × J1 + |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
5. Уравнения собственных колебаний являются линейными однородными, поэтому решение, при котором хотя бы одна из инерционных сил J1 или J2 отлична от нуля, отвечает условию:
(δ11* - λ) δ12*
= 0.
δ*21 (δ*22 - λ)
51
Раскрытие определителя дает квадратное уравнение относительно λ :
λ2 - (δ11* + δ*22 ) × λ + δ11* ×δ*22 - (δ12* )2 = 0 .
6.Решив полученное квадратное уравнение, найти два ве-
щественных корня λ1 , λ2 и определить искомые значения угловых и технических частот собственных колебаний заданной системы:
ω1 = |
|
EI |
|
|
(с–1 ); |
f1 |
= |
ω1 |
|
(Гц); |
|
m × λ1 |
|
|
|||||||||
|
|
|
|
|
2π |
||||||
|
|
|
|
|
|
|
|
|
|||
ω2 = |
|
EI |
|
(с–1 ); |
f2 |
= |
ω2 |
(Гц). |
|||
|
m × λ2 |
|
|
||||||||
|
|
|
|
|
|
|
2π |
||||
Значение λ1 = λmax соответствует минимальной частоте собственных колебаний системы:
ω1 = ωmin = |
EI |
|
|
. |
|
|
||
|
m × λmax |
|
7. Подставив в уравнение частот в амплитудах перемещений массы (δ11 – λi) · Y1i + δ12 · Y2i = 0 значения λ1, λ2 и задав амплитудные перемещения Y11 = 1, Y12 = 1, получить значения перемещений Y21, Y22 и изобразить главные формы собственных колебаний системы.
Для расчета на установившиеся вынужденные колебания необходимо:
1. Записать систему двух уравнений вынужденных колебаний с двумя неизвестными инерционными силами J1 и J2:
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
- |
|
× J1 + δ12 × J2 + ∆1F = 0, |
||||||||
δ11 |
|
|
|
|
||||||||
m × |
2 |
|
||||||||||
|
|
|
ωF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
δ21 |
× J1 |
+ δ22 |
- |
|
|
|
× J2 |
+ ∆2 F |
= 0. |
|||
m × ωF |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
52

2. Принять ωF = 0,9 × ωmin |
, тогда wF |
2 = 0,81× |
EI |
и соот- |
||||||||
m × λmax |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
ветственно: |
|
|
|
|
|
|
|
|
|
|
||
1 |
|
= |
1 |
|
= |
λmax |
|
. |
|
|
||
|
m × wF |
2 |
m × 0,81× EI |
|
0,81× EI |
|
|
|||||
m× λmax
3.Построить эпюру изгибающих моментов MF в заданной системе от амплитуды F вынуждающей силы F (t) и вычислить
перемещения:
D1F = ∑∫ |
M1 × M F |
ds; |
D2 F = ∑∫ |
M 2 × M F |
ds. |
||||||
|
|
|
|
||||||||
|
|
EI |
|
|
|
|
|
|
|
EI |
|
1 |
|
, |
D1F , D2 F |
|
|
|
|||||
4. Подставить |
|
|
и известные из расчета |
||||||||
m × wF |
2 |
||||||||||
на собственные колебания |
перемещения |
δ11 , δ22 , δ12 = δ21 |
|||||||||
в систему уравнений, умножить на |
EI и, |
решив ее, найти ам- |
|||||||||
плитудные значения сил инерции |
J1 |
и |
J2 |
вынужденных коле- |
|||||||
баний системы. |
|
|
|
|
|
|
|
|
|
||
5. Построить эпюру амплитуд динамических изгибающих |
|||||||||||
моментов по формуле |
|
|
|
|
|
|
|
|
|
||
M dyn = ±(M F |
+ M1 × J1 + M 2 × J2 ) . |
||||||||||
Знак «+» соответствует значению sin ωF t = +1 , соответственно знак «–» – значению sin ωF t = −1 .
6. Построить эпюру изгибающих моментов M st от статического действия веса сосредоточенной массы Q = m × g , приняв
g= 9,8 м/с2.
7.Построить эпюру расчетных изгибающих моментов по формуле
M= M st + M dyn .
8.По эпюре M построить эпюры поперечных и продольных сил при sin ωF t = +1 .
53

1 |
F(t) |
2 |
F(t) |
|
m |
m |
|||
|
|
|
2a |
a |
|
a |
a |
a |
3 |
|
|
4 |
|
|
|
|
|
F(t) |
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
F(t) |
|
|
|
|
|
m |
|
|
2a |
a |
|
2a |
|
a |
5 |
|
|
6 |
|
F(t) |
|
|
|
m |
|
|
||
|
|
|
|
|
|
|
|
|
F(t) |
m |
|
|
|
|
|
|
|
|
|
|
|
a |
2a |
|
a |
|
2a |
|
|
|
|
|
||
7 |
F(t) |
|
8 |
|
|
F(t) |
m |
|
|
m |
|
||
|
|
|
|
|
a |
a |
a |
a |
a |
a |
|
|
|
Рис. 9
54

9 |
10 |
F(t) m
2a a
11 F(t)
m 
2a a
13 m |
F(t) |
F(t)
m
a2a
12
F(t) m 

3a
14
F(t)
m 
2a a
a 2a
15 |
F(t) |
16 |
m
F(t)
m
|
2a |
|
a |
|
|
2a |
|
a |
|
|
|
|
|
|
|||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9 (продолжение)
55
17
19
21
23
 F(t)
F(t)
m 
2a
a a a
F(t) |
a |
|
m |
||
|
||
|
a |
a2a
|
a |
F(t) |
m |
|
|
|
a |
2a |
a |
F(t)
 a m
a m
a
a a a
18
20
22
24
m 


a
F(t)
m
a
F(t)
m
a
2a
Рис. 9 (окончание)
F(t) |
a |
|
|
|
a |
2a |
|
|
a |
|
a |
2a |
|
a a
2a
F(t)
m 
2a
a
56
Вопросы для самопроверки по теме «Динамика и устойчивость стержневых систем»
1.Динамика сооружений. Особенности расчетов. Классификация динамических нагрузок. Виды колебаний. Динамические степени свободы систем.
2.Основные задачи динамических расчетов сооружений. Методы решения задач динамики.
3.Колебания систем с одной степенью свободы. Обобщенная расчетная модель. Свободные колебания систем с одной степенью свободы без учета демпфирования.
4.Системы с конечным числом степеней свободы. Принятые гипотезы и допущения. Расчетная схема системы при свободных и вынужденных колебаниях.
5.Собственные колебания систем с конечным числом степеней свободы. Система канонических уравнений. Виды ее решения. Определение коэффициентов при неизвестных.
6.Уравнение частот, его решение. Определение частот и форм собственных колебаний. Ортогональность главных форм.
7.Расчет систем с конечным числом степеней свободы на гармонические воздействия. Установившиеся колебания.
8.Понятие устойчивости стержневых систем. Виды равновесия. Критическая нагрузка. Виды потери устойчивости. Бифуркация.
9.Общий порядок расчета с учетом устойчивости. Принятые допущения при линейной постановке задачи устойчивости. Пределы применения принятой постановки.
10.Методы расчета на устойчивость. Расчет на устойчивость методом перемещений. Основная система. Система канонических уравнений, ее физический смысл.
11.Стандартные задачи для расчета на устойчивость методом перемещений. Определение коэффициентов при неизвестных.
12.Получение уравнения устойчивости. Определение критической нагрузки и формы потери устойчивости.
57
СПИСОК ЛИТЕРАТУРЫ
1.Дарков А. В. Строительная механика : учебник / А. В. Дарков, Н. Н. Шапошников. – 12- е изд., стер. – СанктПетербург ; Москва ; Краснодар : Лань, 2010. – 656 с.
2.Строительная механика. Кн. 1. Статика стержневых систем : учебник для вузов / В. Д. Потапов [и др.]. – Москва : Высшая школа, 2007. – 511 с.
3.Анохин Н. Н. Строительная механика в примерах и задачах : учеб. пособие для вузов по строит. спец. Ч. 1. Статически определимые системы / Н. Н. Анохин. – 2- е изд., перераб. и доп. – Москва : Ассоц. строит. вузов, 2007. – 336 с.
4.Анохин Н. Н. Строительная механика в примерах и задачах : учеб. пособие для вузов по строит. спец. Ч. 2. Статически неопределимые системы / Н. Н. Анохин. – 2- е изд., перераб. и доп. – Москва : Ассоц. строит. вузов, 2007. – 464 с.
5.Себешев В. Г. Строительная механика. Ч. I. Статически определимые системы : иллюстративный конспект лекций [Электронный ресурс] / В. Г. Себешев ; Новосиб. гос. архи- тектур.-строит. ун-т (Сибстрин). – Новосибирск : НГАСУ
(Сибстрин), 2008.
6.Себешев В. Г. Строительная механика. Ч. II. Статически неопределимые системы : иллюстративный конспект лекций [Электронный ресурс] / В. Г. Себешев ; Новосиб. гос. архитектур.-строит. ун-т (Сибстрин). – Новосибирск : НГАСУ (Сибстрин), 2010.
7.Крамаренко А. А. Лекции по строительной механике стержневых систем. Ч. 1, 2. Статически определимые системы : курс лекций / А. А. Крамаренко. – Новосибирск : НГАСУ
(Сибстрин). – Ч. 1. – 2000 ; ч. 2. – 2002.
8.Крамаренко А. А. Лекции по строительной механике стержневых систем. Ч. 3–5. Статически неопределимые системы : курс лекций / А. А. Крамаренко, Л. А. Широких. – Новосибирск : НГАСУ (Сибстрин). – Ч. 3 – 2002 ; ч. 4. – 2004 ; ч. 5. – 2009.
58