

12. Угловые характеристики синхронных генераторов.
Зависимости
 представленные графически, называются
угловыми характеристиками синхронной
машины.
представленные графически, называются
угловыми характеристиками синхронной
машины.
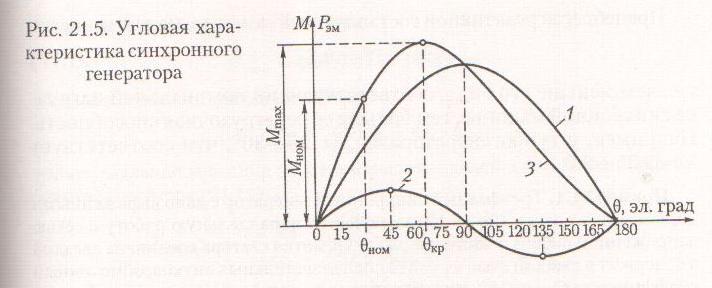
Данная характеристика активной мощности получена при условии:
1- основная составляющая электромагнитного момента (изменяется пропорционально синусу θ)
2- реактивная составляющая момента (изменяется пропорционально синусу 2θ)
3- итоговая (результирующая) кривая момента и соответственно электромагнитной мощности.
|
|
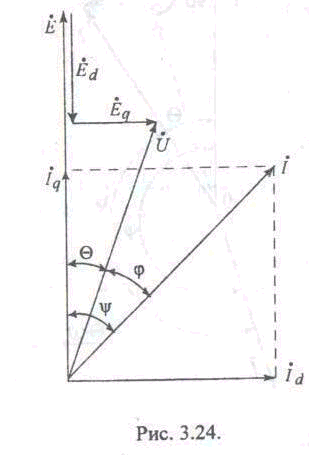
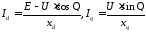
Значения составляющих тока якоря исходя из векторной диаграммы:
Подставляя это в ранее определенное выражения для мощности получим:
|

 .
.
Уравнение для угловой характеристики активной мощности явнополюсной СМ имеет две составляющие. Первая составляющая зависит как от напряжения, так и от ЭДС, созданной магнитодвижущей силой обмотки возбуждения. Вторая составляющая не зависит от возбуждения машины. Она возникает вследствие различия в индуктивных сопротивлениях по продольной и поперечной осям. За счет этой составляющей явнополюсный генератор может работать параллельно с сетью и при отсутствии тока возбуждения, когда Е=0. В этом случае магнитный поток будет создаваться только реакцией якоря. При номинальном возбуждении амплитуда второй составляющей мощности составляет 20-35% амплитуды первой, основной составляющей.
Максимальная мощность, которая определяет статическую перегружаемость в явнополюсной машине, будет иметь место при θ<π/2. Отношение максимального электромагнитного момента Ммах к номинальном Мном называют перегрузочной способностью см, или коэффициентом статической перегруженности.
Неявнополюсная машина. Из выражения активной мощности,
учитывая,
что
 получим:
получим:
При увеличении Р от нуля угол будет расти от = 0° и при критическом угле нагрузке кр = 90° достигается максимальная мощность Р = Рmax, которую способен развить генератор. При дальнейшем увеличении (более 90°) активная мощность генератора уменьшается. Таким образом, область 0 < < 90° -область устойчивой работы, область 90° < < 180° - неустойчивой работы. В двигательном режиме кривые аналогичны(отображаются относительно 0 ).
13. Механическая характеристика синхронного двигателя.
Уравнения механической характеристики нелинейны в связи с наличием произведения переменных. Приближенное уравнение механической характеристики двигателя может быть найдено с помощью угловой статической характеристики синхронной машины.
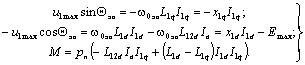
Положим и будем пренебрегать активным сопротивлением статора R1. Будем считать, что обмотка возбуждения питается от источника тока, и во всех режимах iв=Iв=const. В этом случае уравнения механической характеристики примут вид:
 (2.1)
(2.1)
Из первого и второго уравнений определяются токи статора:
![]() (2.2)
(2.2)
Подставив эти выражения в третье уравнение системы и, учитывая, что , после преобразований получаем уравнение угловой характеристики двухфазного явнополюсного синхронного двигателя:
![]() (2.3)
(2.3)
Подставив и , получим уравнение угловой характеристики трехфазного асинхронного явнополюсного двигателя:
![]() (2.4)
(2.4)
Из этого выражения видно, что момент синхронного двигателя содержит две составляющие. Первая обусловлена взаимодействием вращающегося магнитного поля статора с полем возбуждения ротора, а вторая представляет собой реактивный момент, обусловленный явнополюсным исполнением ротора. Вследствие явнополюсности, энергия магнитного поля максимальна при любом из двух положений ротора, поэтому вторая составляющая момента зависит от двойного угла Θэл.
На рис. 2.5 изображена угловая характеристика трехфазной синхронной машины с явновыраженными полюсами.
Θэл.ном.
обычно составляет 20°-30°. Это обеспечивает
перегрузочную способность двигателя
. Реактивный момент увеличивает крутизну
рабочего участка угловой характеристики
и несколько повышает перегрузочную
способность двигателя.
Рис. 2.5. Угловая характеристика трехфазной синхронной машины с явновыраженными полюсами.
Так как основная составляющая момента определяется линейной зависимостью момента от напряжения питания, то перегрузочная способность двигателя менее чувствительна к изменению напряжения сети, чем у асинхронного двигателя.
Вектор определяется геометрической суммой потокосцеплений обмотки статора по оси d (рис. 5.1б):
![]() (5.9)
(5.9)
и по оси q:
![]() (5.10)
(5.10)