

2. Расчет параметров дпт
Номинальная скорость вращения вала двигателя рассчитывается по формуле 2.13, рад/с:
 (2.1)
(2.1)
где n – номинальная частота вращения вала двигателя, об/мин.
Произведение конструктивного коэффициента двигателя на номинальный магнитный поток:
 (2.2)
(2.2)
где Rяц=Rоя+Rдп+Rщ – сопротивление якорной цепи, Rоя – сопротивление обмотки якоря, Ом; Rдп – сопротивление обмотки доп. полюсов, Ом; Rщ – сопротивление щеточных контактов, Ом; Uн – номинальное напряжение двигателя, В; Iн – номинальный ток двигателя, А.
Номинальный момент двигателя находится по формуле 2.3, Нм:
 (2.3)
(2.3)
где k=pN/2Па – конструктивный коэффициент. p – число полюсов;N – число активных проводников обмотки коря; a–число параллельных ветвей обмотки якоря.
Из уравнений 2.4 и 2.5 получается система уравнений 2.6.
 (2.6)
(2.6)
 (2.7)
(2.7)
 (2.8)
(2.8)
Электромагнитная постоянная времени обмотки возбуждения двигателя определяется по формуле 2.9:
 (2.9)
(2.9)
где LОВ – индуктивность обмоток возбуждения; wВ – число витков обмотки возбуждения; RОВ – сопротивление обмотки возбуждения, Ом (RОВ=UВН/IВН); ks – коэффициент рассеяния главных полюсов, ks = 1,1…1,25; dФ/dIВ определяется по диаграмме (рисунок 2.3.) согласно выражению dФ/dIВ≈(ΔФ/ΔI)(ФН/IВН).
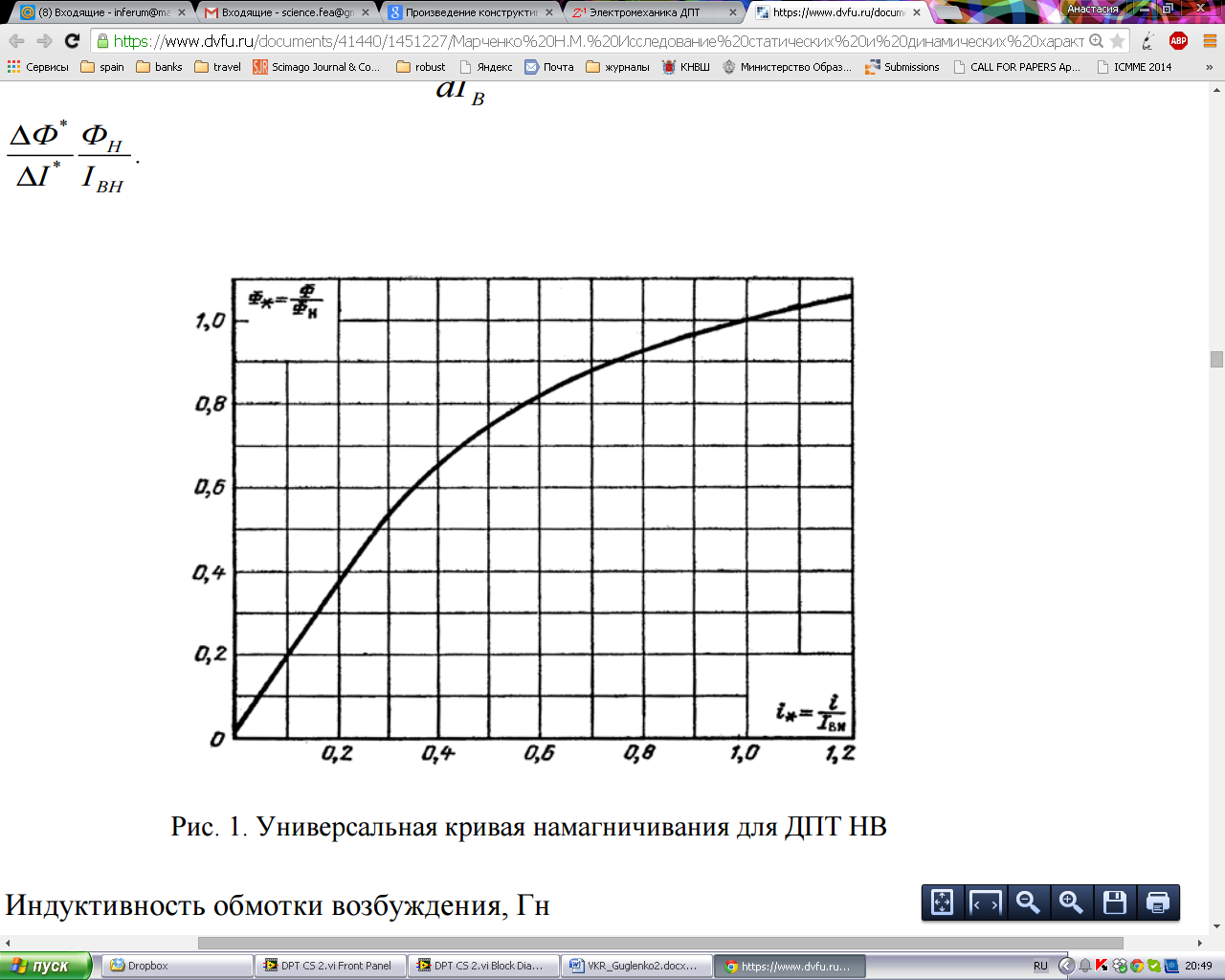
Рисунок 2.3 – Универсальная кривая намагничивания ДПТ.
Расчет момента инерции и механической мощности:
Работа – скалярная физическая величина, равная произведению проекции силы на направление Fи пути S, проходимое точкой приложения силы.

При вычислении момента инерции ротора
его, первом приближении, можно считать
сплошным однородным цилиндром с моментом
инерции, равным
 ,
где m – масса ротора, кг;
R – радиус.
,
где m – масса ротора, кг;
R – радиус.
3. Программная реализация математической модели дпт в LabView
Для программной реализации математической модели двигателя постоянного тока в пакете математического проектирования Labview были использованы три метода:
-
Формирование модели с помощью цикла For;
-
Задание модели с использование передаточной функции;
-
Реализация модели посредством структурной схемы.
Формирование модели дпт с помощью цикла For
-
напряжение (Voltage) – U;
-
момент инерции (Torque) – J;
-
угловая скорость – w;
-
ток – I.
Все эти величины описаны в программе,блок-диаграмма которой представлена на рисунке 2.3
Ввод параметров двигателя осуществляется в компоненте Cluster «Motor_para», имеющем сопротивление цепи якоря R, коэффициент ЭДС двигателя k, крутящий момент J и величину времени dt.
С помощью данного подхода возможно реализовать математическую модель ДПТ и построить переходную характеристику скорости вращения ротора.
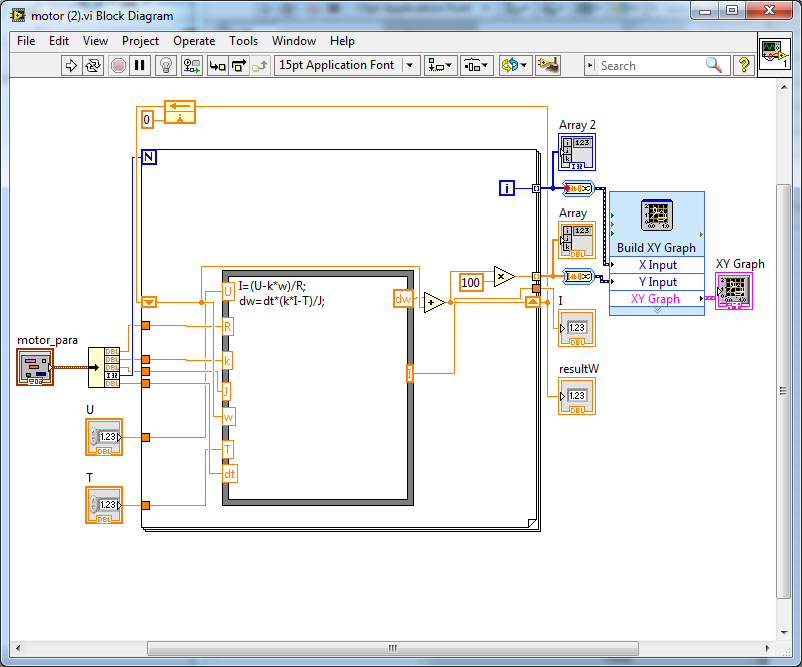
Рисунок 3.1 – блок-диаграмма программы.
Лицевая панель данного ВП представлена на рисунке 3.2
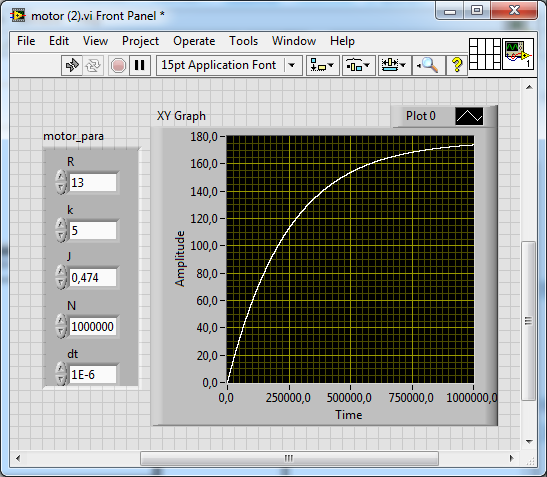
Рисунок 3.2 - Лицевая панель.
4. Задание модели дпт с использование передаточной функции
Задавшись структурной схемой двигателя постоянного тока, представленной на рисунке 4.3, можно найти передаточные функции двигателя по управлению W1(p)=ω(p)/U(p),W2(p)=M(p)/U(p) и по возмущению W3(p)=ω(p)/Mс(p). Для этого воспользуемся известными правилами преобразования структурных схем.
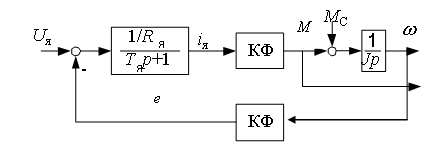
Рисунок 4.3 - Структурная схема ДПТ.
В результате получим:
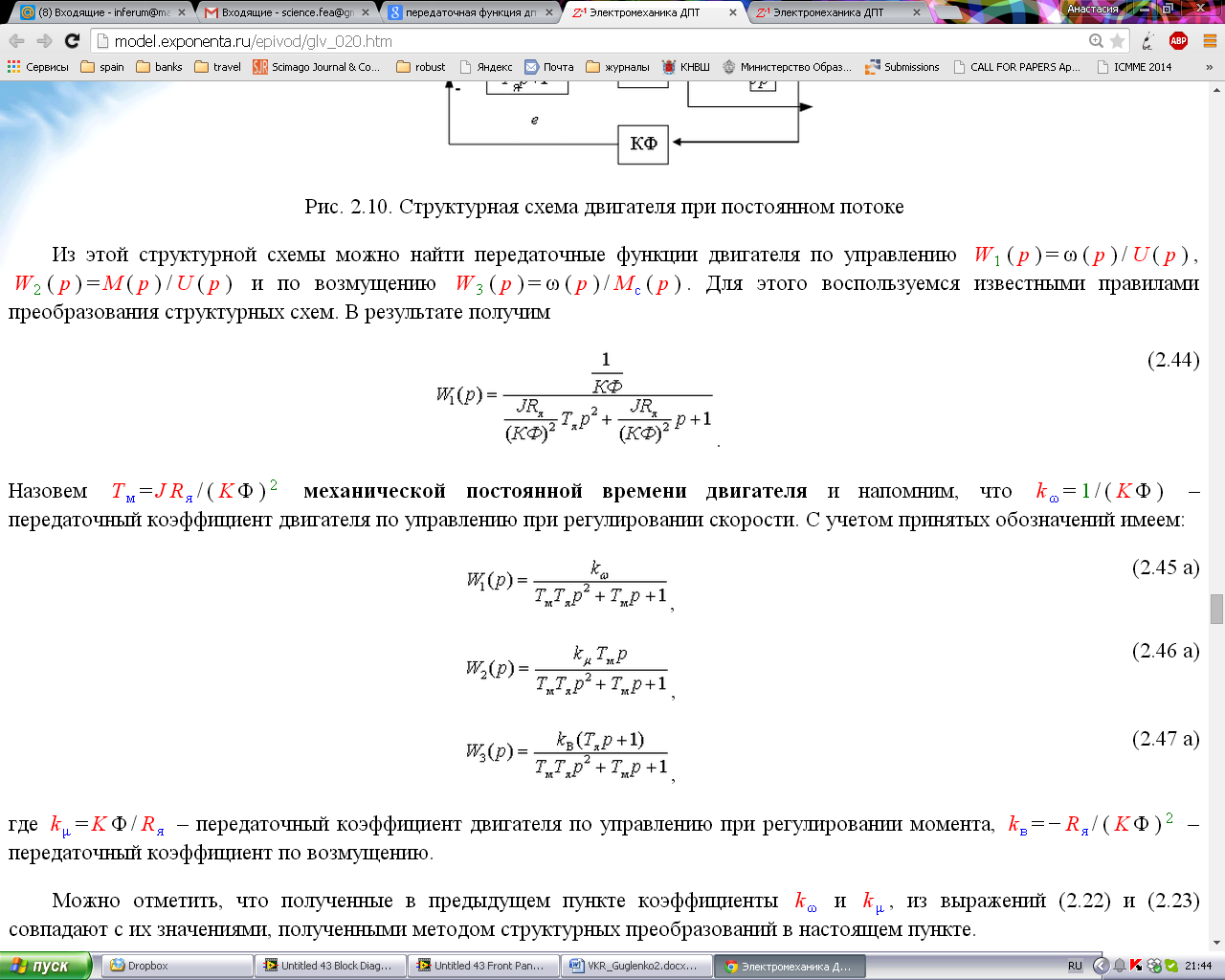
(4.1)
НазовемTм=JRя/(KΦ)2механической постоянной времени двигателяи напомним, чтоkω=1/(KΦ)– передаточный коэффициент двигателя по управлению при регулировании скорости. С учетом принятых обозначений:
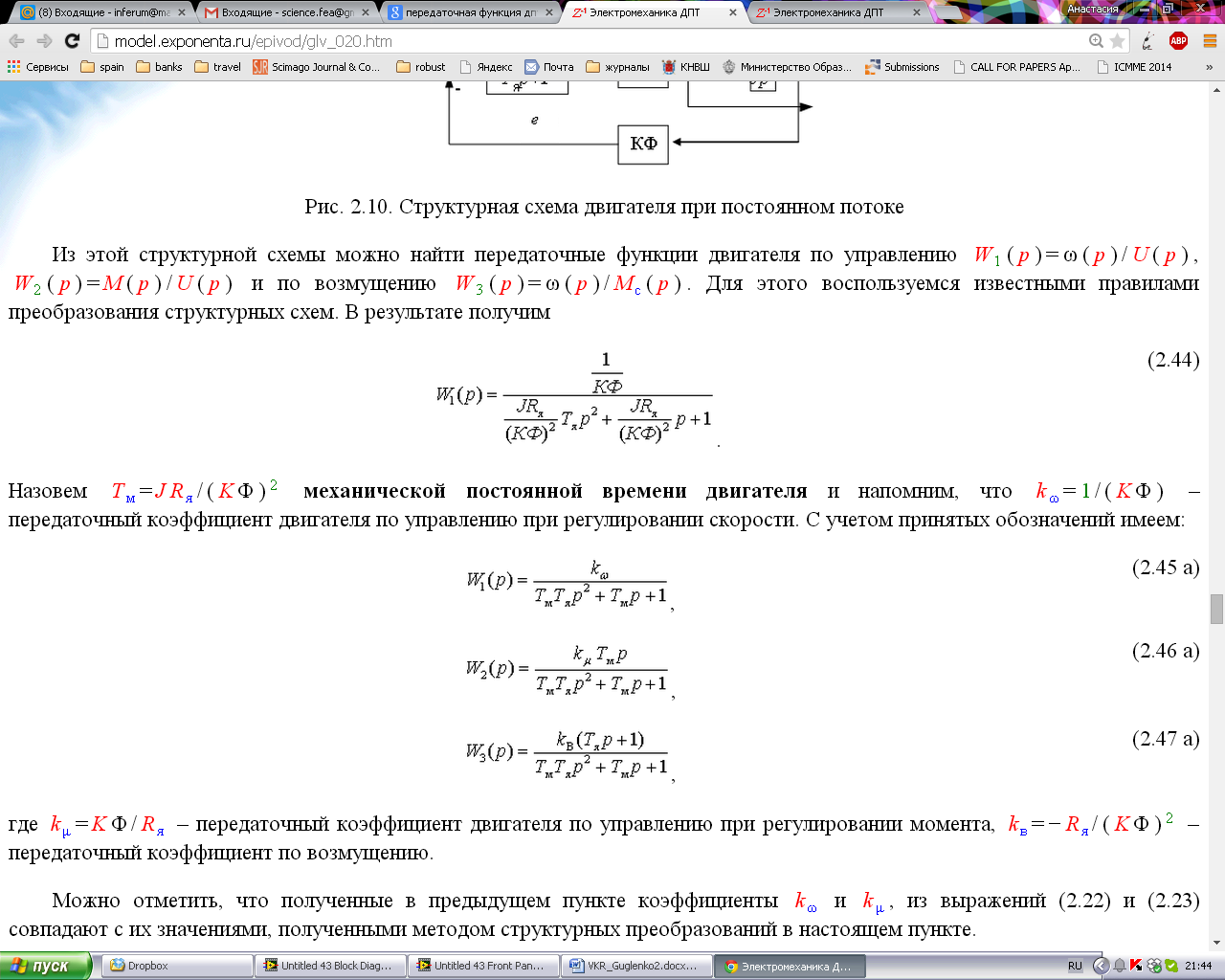
(3.2)
гдеkμ=KΦ/Rя– передаточный коэффициент двигателя по управлению при регулировании момента,kв=−Rя/(KΦ)2– передаточный коэффициент по возмущению.
Лицевая панель программы, реализующей построение математической модели ДПТ (разомкнутая система), представлена на рисунке 3.4.
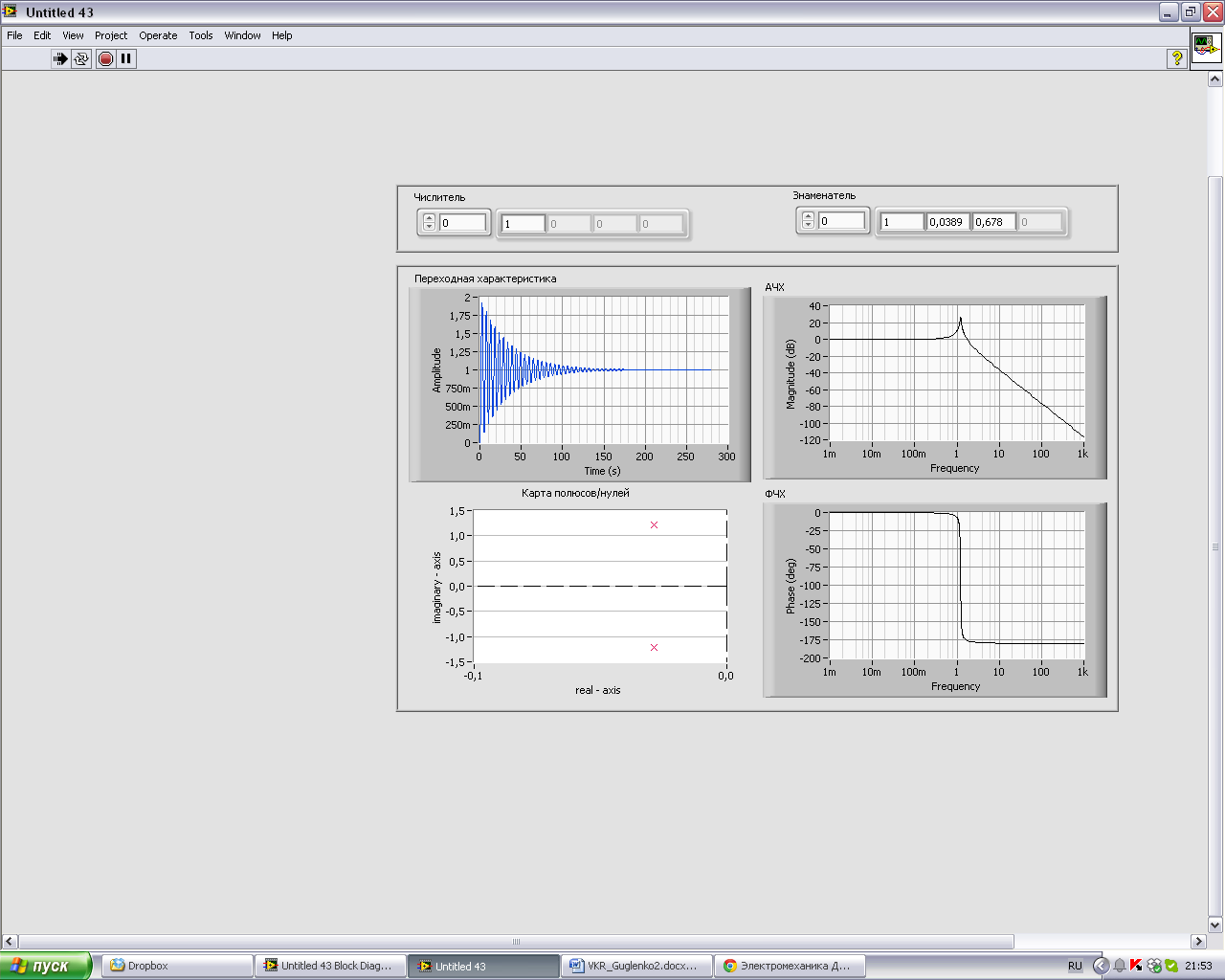
Рисунок 3.4 –лицевая панель программы.
При реализации данного подхода к реализации математической модели, в алгоритм программы были введены следующие функции, обеспечивающие исследования объекта управления:
-
построение переходной характеристики;
-
построение логарифмической амплитудно-частотной характеристики;
-
построение логарифмической фазовой-частотной характеристики;
-
построение карты полюсов и нулей;