

Индуктивный преобразователь трансформаторного типа
Л
Обмотка W1 питается от источника переменного тока. К зажимам вторичной обмотки W2 подключается вольтметр или вибратор осциллографа. При изменении воздушного зазора, изменяется магнитное сопротивление для потока Ф, сцепленного с витками обмотки W2 (ток I1 – постоянен).
Таким образом, величина потока и индуктированная во вторичной обмотке ЭДС Е2 будут функциями длины воздушного зазора, т.е. величины Р:
Е2=W2Ф=W2F/ZM=f(P)
Чувствительность трансформаторных преобразователей с изменяющейся длиной или площадью воздушного зазора растет с ростом частоты источника питания и тока в обмотке возбуждения.
Для трансформаторных преобразователей применяют обычные методы измерения напряжения переменного тока. При необходимости определения знака измеряемой величины используют фазочувствительные демодуляторы.
Основным достоинством таких преобразователей является возможность получения большой мощности преобразователя (до 1-5 ВА), это позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи и регистрировать измеряемую переменную величину самописцем или вибратором осциллографа без предварительного усиления.
Дифференциальный индуктивный преобразователь
Как любой параметрический преобразователь, индуктивный преобразователь может выполняться дифференциальным, т.е. с двумя магнитными системами, изменяющими свои параметры в разных направлениях.
Использование дифференциальных преобразователей позволяет увеличить линейный участок характеристики по сравнению с линейным участком характеристики одинарного преобразователя, причем, рабочее перемещение якоря увеличивается до
=(0,30,4) 0, а также является радикальным средством уменьшения погрешности от влияния внешних факторов и увеличения относительной чувствительности преобразователя к измеряемой величине. Для увеличения чувствительности преобразователя к измеряемой величине следует максимально использовать длину зазора, т.е. увеличивать / (вплоть до =0).
По сравнению с другими преобразователями перемещения индуктивные преобразователи отличаются значительными по мощности выходными сигналами, простотой и надежностью в работе.
Области применения индуктивных преобразователей весьма разнообразны, поскольку ИП данного типа используются в широком диапазоне измерений перемещений:
- преобразователи с малым воздушным зазором имеют рабочее перемещение 0,01-10 мм;
- преобразователи с изменяющейся площадью воздушного зазора применяют при измерении перемещений порядка 5-20 мм;
- преобразователи с разомкнутой магнитной системой – для измерения значительных перемещений сердечника – 10-100 мм.
Датчик перемещения с изменяющейся индуктивностью.
Наиболее широко для контроля размеров изделий, перемещений движущихся деталей, усилий, давлений, веса грузов и других физических величин используются индуктивные преобразователи.
Такое широкое распространение они получили благодаря своим достоинствам: большой выходной мощности, не требующей дальнейшего усиления сигнала, высокой чувствительности к измеряемой величине, широким пределам измерений, достаточной точности контроля, долговечности в работе, удобству в эксплуатации, простоте конструкции и схемных реализаций.
Однако наряду с отличными достоинствами индуктивные преобразователи обладают нелинейностью характеристики. Поэтому при разработке индуктивного измерительного преобразователя необходимо провести оптимизацию его конструкции, т.е. выбрать такие конструктивных и основных параметров преобразователя, которые бы позволили получить наилучшие метрологические характеристики.
Очень часто в практических целях возникает необходимость осуществлять допусковый контроль размеров изделий, т.е. не самих размеров, а отклонений их от номинальных параметров. Поэтому определенный интерес представляет выяснение протяженности линейного участка характеристики индуктивного преобразователя вблизи заданной ее рабочей точки.
Датчик перемещения с изменяющейся индуктивностью предназначен для преобразования линейного перемещения в изменение индуктивности его обмоток.
Датчик перемещения с изменяющейся индуктивностью, во время работы должен быть устойчивым и прочным к воздействию однократных и многократных механических ударов.
Данные датчики должны сохранять свои характеристики при воздействии постоянных магнитных полей сетевой частоты с напряженностью до 400А/м.
Эксплутационные требования:
Безопасность эксплуатации датчика перемещения с изменяющейся индуктивностью должна обеспечиваться
1)прочностью установленной в стандартах,
2)изоляцией электрических цепей,
3)надежным креплением при монтаже на объекте.
Структурная схема:
Для получения выходного сигнала, индуктивный датчик должен быть включен в электрическую схему.

Принцип действия датчика перемещения с изменяющейся индуктивностью:
Действие датчика основано на преобразование линейного перемещения в изменение индуктивности его обмоток путем воздействия на подвижный элемент магнитной системы - якорь(1).Обмотки(2) датчика включены в фазочувствительный мост с выпрямителем, собранный по кольцевой схеме .

![]()
Принцип действия индуктивного датчика основан на изменении
индуктивной системы под воздействием входной величены. Индуктивность электромагнитной системы L определяется отношением потока сцепления к вызвавшему их I.
![]()
![]()

В индуктивных датчиках изменяющимся параметром цепи является индуктивное сопротивление
![]()
частота переменного тока
L![]() x-
индуктивность датчика, изменяющаяся
при перемещение подвижной системы
датчика.
x-
индуктивность датчика, изменяющаяся
при перемещение подвижной системы
датчика.
Эти системы применяются лишь на переменном токе, величина которого будет изменяться при изменении
![]()
И![]()
 ндуктивность
дроселя при ненасыщенном магнитопроводе
может быть выраженна следующей формулой
ндуктивность
дроселя при ненасыщенном магнитопроводе
может быть выраженна следующей формулой
Где w-число витков обмотки дросселя,
Rm-магнитное сопротивление сердечника и якоря,
![]() -длинна
воздушного зазора,
-длинна
воздушного зазора,
Sb- площадь поперечного сечения воздушного зазора.
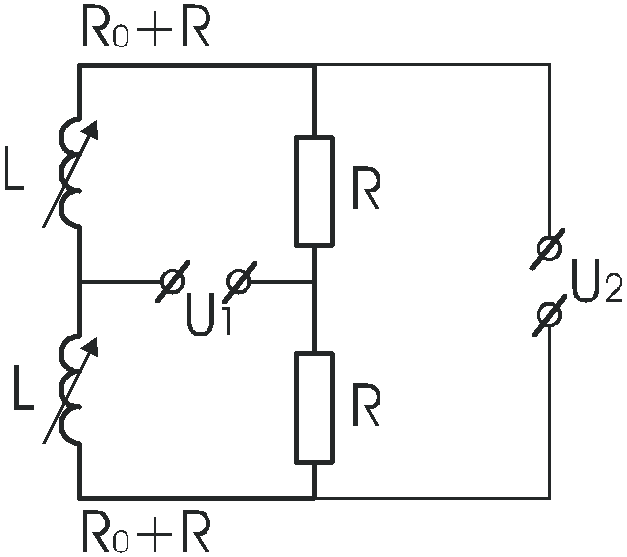
ля тока и тангенса угла сдвига фаз в цепи нагрузки имеем:


где R-активное сопротивление обмотки дросселя
![]()
Z![]() н
- полное сопротивление нагрузки
н
- полное сопротивление нагрузки
Т![]() аким
образом, при изменении длинны или
площади поперечного сеченияSb
воздушного зазора будет изменяться
величина тока и угол сдвига фаз между
векторами напряжения и тока.
аким
образом, при изменении длинны или
площади поперечного сеченияSb
воздушного зазора будет изменяться
величина тока и угол сдвига фаз между
векторами напряжения и тока.
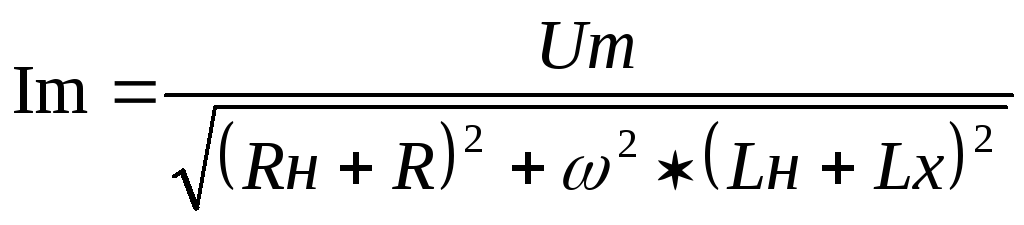
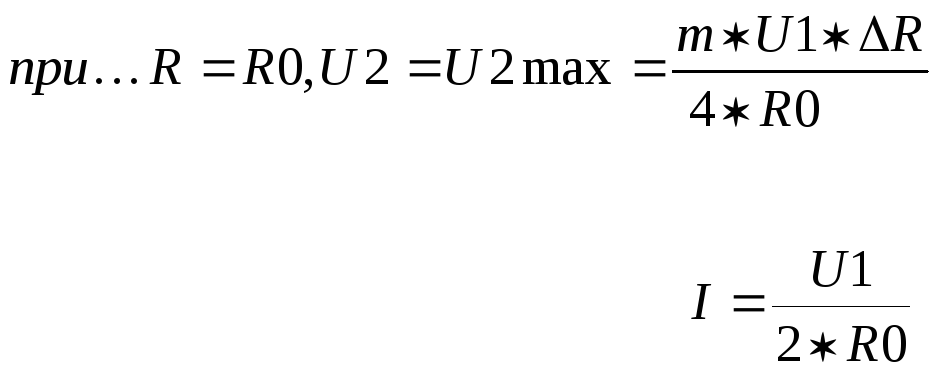
Д![]() ля
определения пределов изменения тока в
цепи нагрузки для магнитных систем при
различных положениях якоря можно
поступить следующим образом: амплитуда
тока в цепи нагрузкиZн,
С
ля
определения пределов изменения тока в
цепи нагрузки для магнитных систем при
различных положениях якоря можно
поступить следующим образом: амплитуда
тока в цепи нагрузкиZн,
С![]()
![]() другой стороны, где значение магнитного
потока
другой стороны, где значение магнитного
потока
может быть выражено через магнитную индукцию B как
![]()
![]() таким образом,
таким образом,
![]()
П![]() ри
определение магнитного потока
ри
определение магнитного потока![]() формула для индуктивности
формула для индуктивности
и![]() меет
следующий вид
меет
следующий вид
и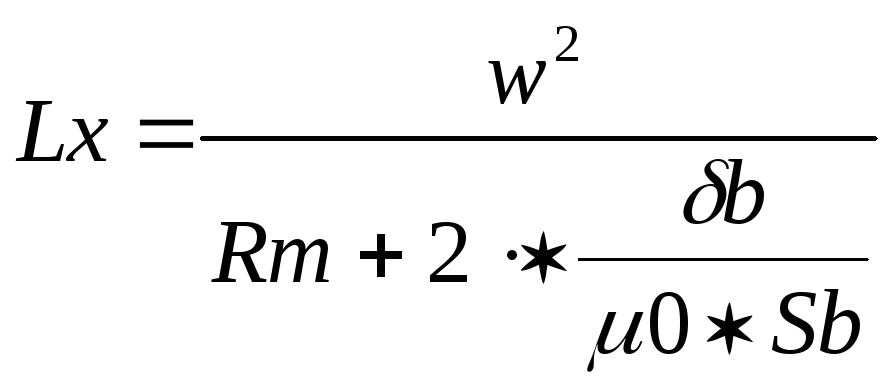 ли
ли
![]()
![]() Подставляя
Im
и умножая на ,находим
Подставляя
Im
и умножая на ,находим
Н аконец
из выражения
аконец
из выражения
![]()
![]()
Где Lc-средняя длинна магнитной силовой линии в сердечнике,
Sc-площадь поперечного сечения сердечника
Lяк- длинна пути магнитного потока в якоре
Sяк-площадь поперечного сечения якоря
![]()
![]() -магнитная
проницаемость для сердечника при
значении магнитной индукции Bm1
-магнитная
проницаемость для сердечника при
значении магнитной индукции Bm1
м

 агнитная
проницаемость для якоря при значении
магнитной индукции в якореBm2
агнитная
проницаемость для якоря при значении
магнитной индукции в якореBm2
![]()
![]()
![]() Далее имеем
Далее имеем
З![]() адаваясь
значениемLx
по формуле №1 определяется величина Bm
и соответствующие ей значения
, а затем по формуле №2
адаваясь
значениемLx
по формуле №1 определяется величина Bm
и соответствующие ей значения
, а затем по формуле №2
![]()
Л![]() ибо
в зависимости оттого,какая из этих
величин изменяется при работе датчика.
ибо
в зависимости оттого,какая из этих
величин изменяется при работе датчика.
Как пример рассмотрим LVDT-датчики перемещения:
Датчики перемещения находят применение во многих приложениях, и, хотя выбор устройств довольно широк, все же рассматриваемые в статье датчики компании Macro Sensors следует выделить из ряда подобных благодаря, как минимум, двум причинам. Во-первых, значительный динамический диапазон измеряемых перемещений, во-вторых — способность работать в самых жестких условиях эксплуатации.
Аббревиатура LVDT образована от словосочетания Linear Variable Differential Transformer — линейный дифференциальный трансформатор с переменным коэффициентом передачи. LVDT-датчики — электромеханический преобразователь, преобразующий прямолинейное перемещение объекта, с которым он связан механически, в электрический сигнал. К отличительным особенностям рассматриваемых датчиков можно причислить очень большой динамический диапазон измеряемых перемещений (от десятков микрон до ±0,5 м) и возможность работать в самых жестких условиях эксплуатации. Первое следует из принципа действия, а второе — из конструктивного исполнения.
Существует довольно много импульсных датчиков перемещения, принцип действия которых основан на регистрации момента пересечения (с помощью магнитных или оптронных датчиков) движущимся объектом определенной метки. При наступлении указанного события на выходе датчика генерируется импульс. Подобные устройства по понятным причинам имеют не только ограниченный динамический диапазон измерений перемещений, но и увеличивают ошибку вычисления скорости и ускорения (первая и вторая производная от перемещения), что не всегда является приемлемым. Рассматриваемые в статье LVDT-датчики, в силу того что их выходной сигнал непрерывен, лишены отмеченных недостатков.