

-
Принципы определения навигационных параметров воздушного судна в снс
-
Общие принципы функционирования снс
Принципы функционирования GNSS сравнительно просты, однако для их реализации используются передовые достижения науки и техники.
Все спутники GPS или ГЛОНАСС являются равноправными в своей системе. Каждый спутник через передающую антенну излучает кодированный сигнал на двух несущих частотах (L1; L2), который может быть принят соответствующим приемником пользователя, находящегося в зоне действия спутника. Передаваемый сигнал содержит следующую информацию:
-
эфемериды спутников;
-
коэффициенты моделирования ионосферы;
-
информация о состоянии спутника;
-
системное время и уход часов спутника;
-
информация о дрейфе спутника.
В приемнике бортового оборудования ВС генерируется код, идентичный принимаемому со спутника. При сравнении двух кодов определяется временной сдвиг, который пропорционален дальности до спутника. Принимая одновременно сигналы от нескольких спутников, можно определить местоположение приемника с высокой точностью. Очевидно, что для функционирования системы необходима точная синхронизация кодов, генерируемых на спутниках и в приемниках.
Ключевым фактором, определяющим точность системы, является то, что все составляющие спутникового сигнала точно контролируются атомными часами. Каждый спутник имеет по четыре квантовых генератора, являющихся высокоточными стандартами частоты со стабильностью 10-13. Часы приемника менее точны, но их код постоянно сравнивается со спутниковыми часами и вырабатывается поправка, компенсирующая уход.
Наземный сегмент осуществляет контроль за спутниками, выполняет управляющие функции и определяет навигационные параметры спутников. Данные о результатах измерений, выполненных каждой контрольной станцией, обрабатываются на главной станции управления и используются для прогнозирования эфемерид спутников. Там же, на главной станции управления, формируются сигналы для коррекции спутниковых часов.
Местоположение воздушного судна с использованием GPS и ГЛОНАСС определяется в геодезических системах координат, которые могут отличаться от геодезических координат, используемых в бортовых навигационных комплексах.
-
Физико-технические принципы функционирования снс.
В основу определения координат ВС положен принцип измерения дальностей до навигационных спутников.
Геометрическая
интерпретация реализации этого принципа
может быть объяснена следующим образом.
Предположим, что в любой момент времени
позиции спутников в околоземном
пространстве известны, и могут быть
измерены первичные навигационные
параметры - дальности до спутников,
находящихся в поле зрения приемника
СНС. Измеренная дальность
![]() до одного спутника определяет поверхность
положения в виде сферы с радиусом, равным
измеренной дальности (рис. 4.1). Дальности
до одного спутника определяет поверхность
положения в виде сферы с радиусом, равным
измеренной дальности (рис. 4.1). Дальности
![]() до двух спутников определяют две
поверхности положения, пересечение
которых определяет линию положения в
виде окружности. Поверхность положения,
полученная с помощью третьего спутника
в виде сферы с радиусом
до двух спутников определяют две
поверхности положения, пересечение
которых определяет линию положения в
виде окружности. Поверхность положения,
полученная с помощью третьего спутника
в виде сферы с радиусом
![]() ,
может иметь пересечение с линией
положения в виде окружности, полученной
от первых двух спутников, только в двух
точках
,
может иметь пересечение с линией
положения в виде окружности, полученной
от первых двух спутников, только в двух
точках
![]() .
.
Таким образом, измеренные дальности до трех спутников ограничивают возможную позицию двумя возможными точками. Методом логического исключения определяется, какая из двух точек является позицией приемника СНС. Например, если одна из точек слишком далеко от поверхности Земли, или имеет слишком большую скорость перемещения относительно земной поверхности, или находится на очень большом удалении от ранее определенной позиции, то такая точка не может быть искомой позицией. В компьютеры бортовой аппаратуры заложено несколько алгоритмов, позволяющих отличить правильную позицию от ложной.

Рис. 4.1. Определение позиции ВС по спутникам
Определение дальности D от спутника до приемника СНС выполняется в результате измерения времени прохождения радиосигнала от спутника до потребителя СНС сигналов по формуле:
D = c t ,
где c - скорость распространения радиосигнала;
t - время прохождения радиосигнала.
Для дальностей порядка D = 20000 км и скорости c = 300000 км/сек время прохождения сигнала t = 0,06 сек. Поэтому в аппаратуре потребителя должно быть обеспечено высокоточное измерение весьма малых промежутков времени.
Для определения времени прохождения радиосигнала от спутника до приемника сигналов использован метод сравнения псевдослучайных кодов, генерируемых в аппаратуре спутника и приемника СНС.
В
самых общих чертах данный метод состоит
в следующем. Аппаратура спутников и
приемников синхронизирована с очень
высокой точностью. И на спутниках, и в
приемниках одновременно генерируются
одинаковые последовательности весьма
сложных цифровых кодов. Эти коды настолько
сложны, что внешне выглядят как длинные
цепочки случайных импульсов, которые
принято называть псевдослучайными
кодами. И так как аппаратура спутников
и приемников генерирует одинаковые
коды в одни и те же моменты времени, то
время прохождения сигнала от спутника
до приемника определяется по задержке
принятого кода (рис. 4.2). Генерируемые
псевдослучайные коды повторяются каждую
микросекунду, т.е. через каждые
![]() сек.
сек.

Рис. 4.2. Измерение времени прохождения сигнала от спутника
Большинство
СНС приемников обеспечивают измерение
времени с точностью до
![]() сек
(т.е. до одной наносекунды).
сек
(т.е. до одной наносекунды).
Для высокоточного определения позиции ВС необходимо, чтобы точность синхронизации часов на спутниках и в аппаратуре потребителей соответствовала потребной точности измерения времени прохождения радиосигнала от спутника до приемника.
На спутниках устанавливаются комплекты из четырех высокоточных атомных часов и, кроме того, эти часы корректируются наземными станциями управления. В СНС приемниках устанавливаются сравнительно неточные кварцевые часы.
Погрешность определения момента времени t по часам приемника, по сравнению с отсчетом на часах спутников, определяется компьютером аппаратуры потребителя в результате вычисления по специальному алгоритму.
Предположим, что спутники и приемник СНС находятся в одной плоскости. Если t=0, т.е. нет погрешностей в измерении времени прохождения радиосигнала одновременно от трех спутников, то линии положения пересекутся в одной точке. В тех же случаях, когда погрешность t, то вычисленные линии положения будут отстоять от фактических линий положения на величину ct и образовывать некоторую область возможных положений приемника СНС (область погрешностей). Размеры этой области определяются величиной ct и углами пересечения линий положения. По специальному алгоритму в компьютере приемника СНС после серии измерений обеспечивается вычисление величины t, которая становится третьей координатой, определяющей позицию приемника на плоскости (рис. 4.3).

Рис. 4.3. Влияние на определение позиции ВС погрешности во времени
Для вычисления погрешности в определении времени по часам приемника СНС и местоположения приемника СНС в пространстве (т.е. в системе трех координат), необходимо одновременное измерение расстояний до четырех спутников. При этом погрешность во времени t является некоторой четвертой координатой. И, следовательно, четыре поверхности положения в виде сфер с радиусами, равными соответствующим дальностям от четырех спутников, определяют некоторую область возможных положений приемника СНС.
Таким образом, для высокоточного определения позиции ВС в реальном масштабе времени, необходимо сочетание многоканального приемника и быстродействующего компьютера. Приемник обеспечивает одновременный прием сигналов от четырех спутников, компьютер вычисляет погрешность часов t и координат приемника в выбранной системе координат.
В тех случаях, когда возможен прием сигналов только от трех спутников, то в алгоритмах аппаратуры потребителей СНС в качестве четвертого спутника принимается центр Земли. И, следовательно, одной поверхностью положения является сфера с радиусом, равным расстоянию от центра Земли до ВС (до приемника СНС). Расстояние от центра Земли до поверхности общеземного эллипсоида вычисляется компьютером аппаратуры потребителя СНС, а расстояние от поверхности эллипсоида до ВС (абсолютная высота) вводится в компьютер вручную или автоматизировано от бортовых систем ВС.
Высокоточное определение местоположения ВС возможно только при условии точного вычисления координат навигационных спутников на момент измерения расстояний до спутников. Рабочие орбиты спутников выбраны такими, чтобы была обеспечена высокая точность сохранения спутниками заданных орбит и периода обращения относительно центра Земли. Эфемериды спутников (параметры, определяющие их положение на орбите) определяются и уточняются с помощью наземного командно-измерительного комплекса. Информация об эфемеридах всех спутников, в виде так называемого "альманаха", вводится в память компьютера аппаратуры потребителя СНС сигналов. И, следовательно, компьютер обеспечивается данными для вычисления координат спутников на любой момент времени. Но, так как под воздействием гравитационных пульсаций Луны и Солнца и давления солнечного излучения на поверхность спутника, возникают изменения в эфемеридах спутника, то на наземном командно-измерительном комплексе определяются эфемеридные ошибки, которые передаются на спутник. В сигналах, передаваемых спутником, содержится информация об эфемеридных ошибках данного спутника.
Данные об эфемеридах спутника, содержащиеся в альманахе, и информация об эфемеридных ошибках, обеспечивают высокоточное вычисление координат спутника компьютером приемника СНС.
Возможная
точность измерения расстояния до
спутника оценивается суммарной средней
квадратической погрешностью в определении
дистанции до спутника
![]() =
5-10м. Точность
определения координат позиции приемника
СНС определяется не только величинами
погрешностей в измерении расстояний
до спутников, но и взаимным расположением
поверхностей положения приемника СНС,
т.е. взаимным расположением спутников.
=
5-10м. Точность
определения координат позиции приемника
СНС определяется не только величинами
погрешностей в измерении расстояний
до спутников, но и взаимным расположением
поверхностей положения приемника СНС,
т.е. взаимным расположением спутников.
Предположим, что два спутника и приемник СНС расположены в одной плоскости (рис. 4.4). Обе линии положения определяются с погрешностью D. Тогда область возможного положения приемника СНС будет значительно меньше при угле пересечения линий положения, близком к (рис. 4.4а), чем при угле пересечения, близком к (рис. 4.4б). Возможная погрешность в определении координат за счет так называемого "геометрического фактора" может возрасти в несколько раз.
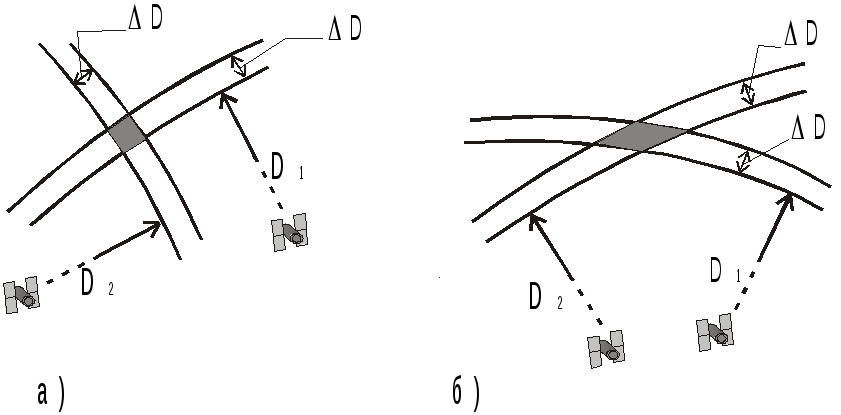
Рис. 4.4. Влияние на определение позиции ВС “геометрического фактора”
При измерении расстояний до четырех спутников погрешности D также определяют область возможного нахождения приемника СНС, и точность определения координат находится в большой зависимости от взаимного расположения спутников, а если в поле зрения антенны приемника СНС находится более четырех спутников, то по определенному алгоритму могут быть выбраны четыре спутника, взаимное расположение которых обеспечивает, в данный момент наибольшую точность вычисления позиции ВС.
Для оценки влияния взаимного расположения спутников и приемника СНС на точность определения координат используется критерий GDOP - Geometric Delution of Precision (Геометрическое снижение точности, "геометрический фактор"). Геометрический фактор GDOP, как правило, обозначается аббревиатурой DOP (в некоторых приемниках СНС этот критерий обозначается PDOP - Position Delution of Precision).
Величина
критерия DOP
определяется из следующих соображений.
Если позиции четырех спутников:![]() и потребителя M
(рис. 4.5)
рассматривать как вершины многогранника,
соединив их прямыми линиями, то будет
очерчен некоторый объем V.
И чем лучше взаимное расположение
спутников для пеленгования, тем будет
больше объем V
такого многогранника, определяющий
величину DOP.
и потребителя M
(рис. 4.5)
рассматривать как вершины многогранника,
соединив их прямыми линиями, то будет
очерчен некоторый объем V.
И чем лучше взаимное расположение
спутников для пеленгования, тем будет
больше объем V
такого многогранника, определяющий
величину DOP.

Рис. 4.5. Многогранник, определяющий “геометрический фактор”
Величина критерия DOP принимается обратно пропорциональной объему V с учетом некоторого коэффициента пропорциональности k:
DOP = k /V.
Величина DOP, как правило, колеблется от единицы до 10. Считается, что при DOP 4 обеспечивается высокая точность определения позиции ВС. Используя сведения из Альманаха, компьютер в аппаратуре потребителя непрерывно вычисляет критерий DOP, определяя лучшую четверку, как правило, из шести-восьми спутников.
Средняя квадратическая радиальная погрешность в определении позиции ВС с учетом геометрического фактора может быть оценена по формуле:
![]()
где
![]() -
средняя квадратическая радиальная
погрешность при DOP
= 1,0.
-
средняя квадратическая радиальная
погрешность при DOP
= 1,0.
За счет оптимального выбора для пеленгования четырех спутников из находящихся в поле зрения антенны, как правило, шести-восьми спутников, точность определения позиции ВС повышается в четыре-шесть раз.
Таким образом, высокая точность определения позиции приемника СНС обеспечивается на основе следующих основных принципов:
-
использования в качестве первично определяемого навигационного параметра дальности до спутника;
-
определения времени прохождения сигнала от спутника с помощью специального генерируемого на спутниках и в аппаратуре потребителя псевдокода;
-
обеспечения точной синхронизации часов на спутниках и в аппаратуре потребителя;
-
вычисления в аппаратуре потребителя с помощью Альманаха и эфемридных поправок координат спутника;
-
оптимального выбора спутников для пеленгования с учетом их взаимного расположения.
Использование псевдослучайного кода в СНС обусловлено не только необходимостью обеспечения высокоточного измерения времени прохождения радиосигнала от спутника до приемника СНС, но и необходимостью принимать и обрабатывать очень слабые радиосигналы от спутника.
Сигналы от навигационных спутников настолько слабы, что не могут быть зарегистрированы на фоне естественного радиоизлучения Земли. Естественный радиошум Земли - это случайные вариации электронных пульсаций. В то время как принимаемый псевдослучайный код - это строго определенная последовательность электронных импульсов. А, так как псевдослучайный код повторяется каждую микросекунду, то с помощью быстродействующего компьютера представляется возможным выполнять многократное сравнение принимаемых сигналов и выделять псевдослучайный код на фоне естественного радиошума Земли. В результате, приемник СНС может иметь очень маленькую антенну, а, в целом аппаратура потребителя сравнительно небольшие габариты и вес и, кроме того, относительно небольшую стоимость. А это, в свою очередь, способствует превращению СНС в систему массового использования.
Одна из важнейших причин применения псевдослучайного кода в СНС - это целесообразность использования всеми спутниками одной и той же несущей частоты в своих передатчиках. Но, так как каждый спутник передает только ему присущий код, приемник легко может отличить сигналы конкретного спутника, и спутники не "забивают" друг друга, работая на одной и той же частоте.
Применение псевдослучайного кода в СНС позволяет также собственнику системы контролировать режим доступа к системе.
Так в американской GPS применяются два вида кодов:
-
C/A-code (Clear/Acquisition - свободного использования);
-
P-code (Protected - защищенный).
P-код засекречен и доступ к нему имеет только Министерство обороны США. C/A-код является общедоступным. Но в процесс использования C/A-кода может быть введен режим S/A (Selective Availability - ограниченного доступа), который предназначен для снижения точности пеленгования простым "загрублением" сигналов времени, передаваемых спутником.
Для повышения точности определения координат ВС, например, при выполнении захода на посадку, в СНС предусмотрен дифференциальный режим.
Сущность дифференциального режима СНС заключается, в общих чертах, в следующем. В районе аэродрома, радиусом 50-100 км, устанавливается контрольная станция, которая принимает сигналы спутников, определяет поправки в координаты для данного района и для текущего момента времени и передает полученные поправки потребителям по специальной линии радиосвязи. Для работы в этом режиме аппаратура потребителя должна иметь приемное устройство для связи с контрольной станцией и специальный дифференциальный режим работы компьютера.