

11.4 Системные свойства ис пл
Эти свойства имеют важное значение при использовании ИС ПЛ в составе систем.
Уровни напряжений питания, которые образуют следующий ряд: изначально + 5В, сейчас 3В, 2В, 2.5В, 1.8В, 1.6В. В самой микросхеме ИС ПЛ имеется встроенный источник питания, который вырабатывает повышенное напряжение для программирования.
Управление энергопотреблением. Выделяют активный и пассивный режимы. В пределах активного режима существует несколько подрежимов: повышенное быстродействие с высоким энергопотреблением и стандартное быстродействие с пониженным энергопотреблением. Пассивный режим делится на 2 подрежима:
Первый подрежим (wait) характеризуется существенным снижением мощности, но со способностью к быстрому переходу в активный режим;
Второй подрежим (stop) – режим глубокого снижения энергопотребления, когда на переход в активное состояние требуется длительное время.
Использование интерфейса (JTAG) - интерфейс граничного сканирования. Используется для программирования внутренних элементов схем, занесения программы в статическую память.
Защита памяти конфигурации.
Возможность внутрисхемного программирования.
Управление крутизной фронтов. Используется для снижения помех, генерируемых самой схемой. Выходные буферные элементы являются источниками сильных помех (особенно при высокой крутизне фронтов), как правило, крутизна выходных фронтов делается низкой и только в специальных случаях ее увеличивают.
11.5 Типовые схемотехнические решения
На рис. 11.5 а) приведена схема управляемого делителя напряжения, который может сформировать на выходе либо сигнал напряжения низкого уровня (логический «0»), либо сигнал напряжения высокого уровня (логическая «1»).
В роли программируемого резистора выступает полевой транзистор, при запирании которого выходное напряжение стремится к логической «1», а при открывании – к логическому «0».
|
Рис. 11.5 Схемы выработки программируемых сигналов управления (а) и программируемых мультиплексоров (б, в, г) |
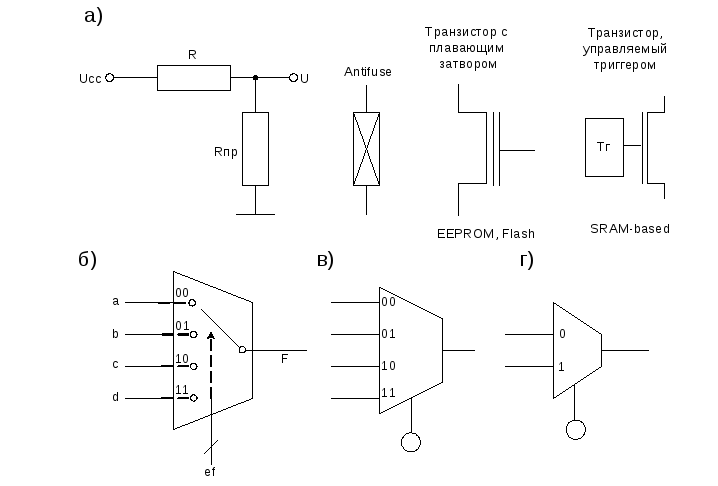
На рис. 11.5 б) приведена схема программируемого мультиплексора, который применяется для конфигурирования межсоединений и построения логических блоков. В последнем случае (рис. 11.5 б) мультиплексор можно условно отобразить в виде переключателя, который под управлением адресных входов передает на выход F одну из входных величин – a, b, c или d. Возле линии каждого входа отмечена комбинация сигналов адреса, подключающая данный вход к выходу мультиплексора. В условном обозначении программируемого мультиплексора в режиме коммутации сигналов (рис. 11.5 в) факт программируемости обозначается кружком на группе адресных входов. При программировании устанавливается определенный код ef и соответствующая ему связь между выходом схемы и одним из входов. Для часто применяемых программируемых мультиплексоров размерности 2-1 условное обозначение имеет вид, показанный на рис. 11.5 г). Комбинации сигналов адреса возле линий входов могут и не указываться, если в этом нет необходимости.
11.6 Приемы дополнительной обработки сигнала
Программирование полярности формируемых функций. Этот прием (рис. 11.6) наиболее часто используется в CPLD, реализующих логические функции в форме ДНФ. Полезность данного приема заключается в том, что логическая функция F и ее инверсия не идентичны по сложности и выражения для них могут иметь существенно различные числа термов.
|
|
|
Рис. 11.6 Схема управления полярностью функции |
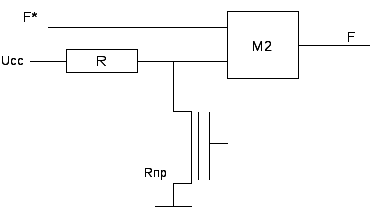
Рассмотрим реализацию схемы управления полярностью функции. В ней М2 – сумматор по модулю 2 («исключающее ИЛИ»).
Пусть
Uуправления = 0 и транзистор закрыт. На
нижнем входе М2 формируется логическая
«1». F*=0
F=1; F*=1
F=0. F=![]() т.е. произошло изменение полярности.
т.е. произошло изменение полярности.
Пусть Uуправления = 1 и транзистор закрыт. На нижнем входе М2 формируется логический «0». F*=0 F=0; F*=1 F=1. F = F*, т.е. полярность не изменяется.