gos / Obzor_Lection_VM12
.doc
![]()
![]() Московский
Инженерно-Физический Институт.
Московский
Инженерно-Физический Институт.
Кафедра № 17
Численные Методы.
Обзорные лекции для К10-171,172.
Лектор: Лавренюк С. Ю.
Москва 2012г.
1. Метод Гаусса.
Решаем СЛАУ:
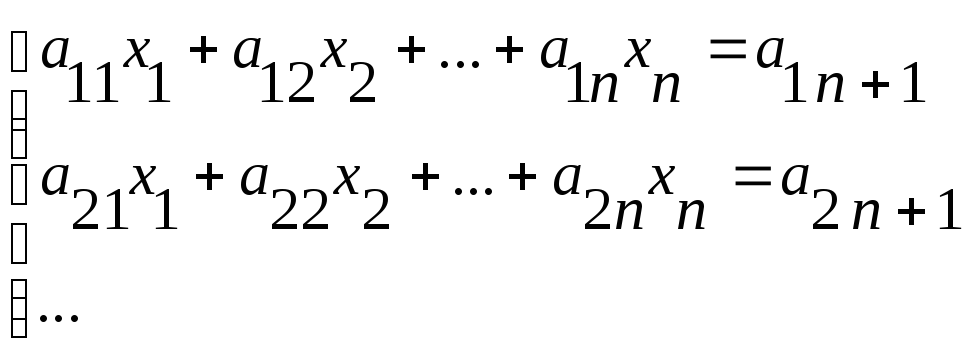
Выполняем n-1 шаг вперёд (приведение матрицы к верхнеугольной), потом n-1 шаг назад (нахождение х)

По аналогичной формуле преобразуются все нижеследующие строчки.
На (n-2)-ом шаге получается треугольная матрица.
Метод Гаусса с выделением главного элемента.
1)
В текущей строке находится
![]()
2)
Переставляются столбцы (то есть
переименовываются хi
в хj
и наооборот), чтобы
![]() оказался спереди.
оказался спереди.
Метод дает выше точность для матриц большой размерности
2. Метод простой итерации решения СЛАУ.

С

 ходится,
если хотя бы одна норма у B
< 1 по модулю, т.е., например, если max||
< 1.
ходится,
если хотя бы одна норма у B
< 1 по модулю, т.е., например, если max||
< 1.
Этот метод имеет ограниченную область сходимости.
Д оказательство:
оказательство:


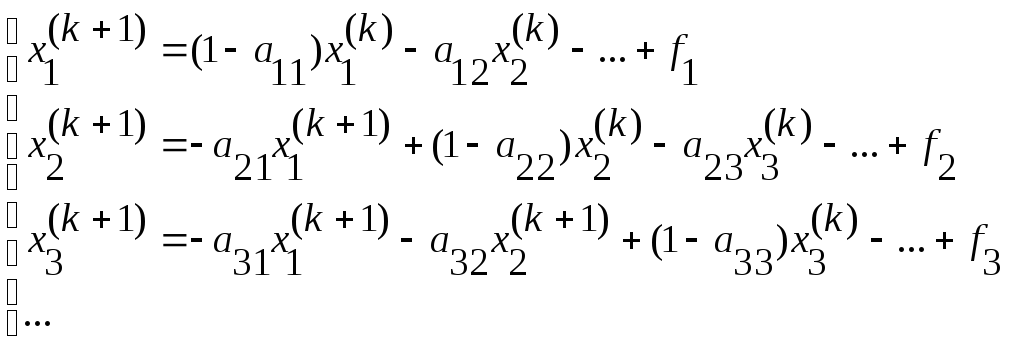
Напишем это же самое в развёрнутом виде:
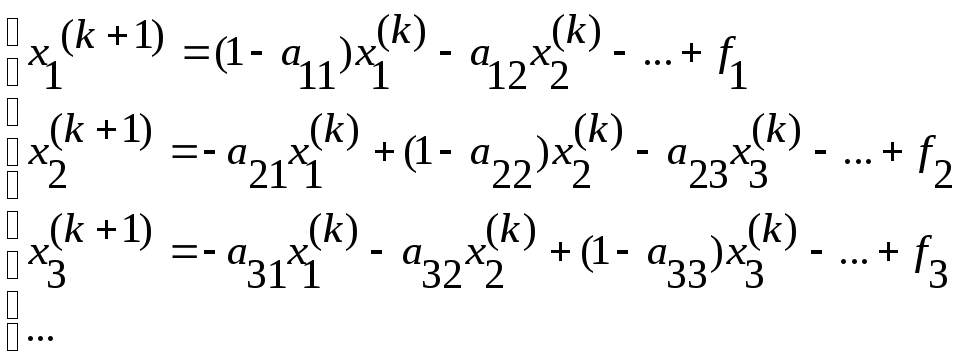
Метод Зейделя.
Усовершенствуем предыдущую систему:
Свойства:
-
Скорость сходимости увеличивается.
-
Можно останавливаться в середине итерации (в середине цикла).
-
Области сходимости той же мощности (некоторые матрицы, которые методом последовательных приближений сходятся, методом Зейделя сходиться не будут, и наоборот).
-
Нет требования к симметричности или положительности .
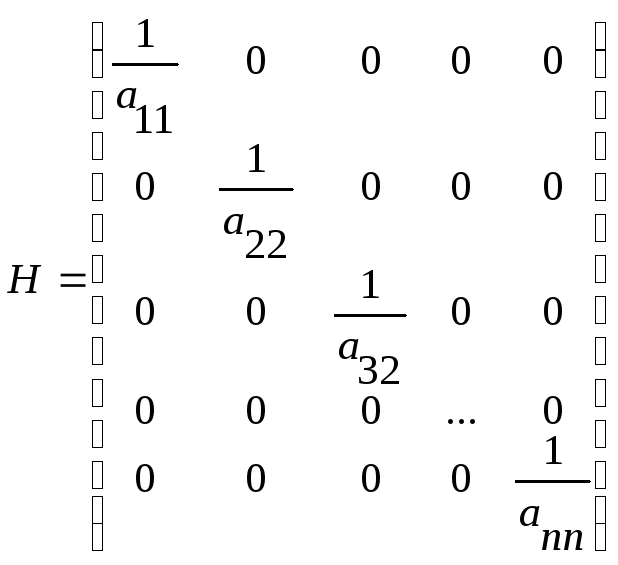
Метод обеспечения сходимости метода Зейделя.
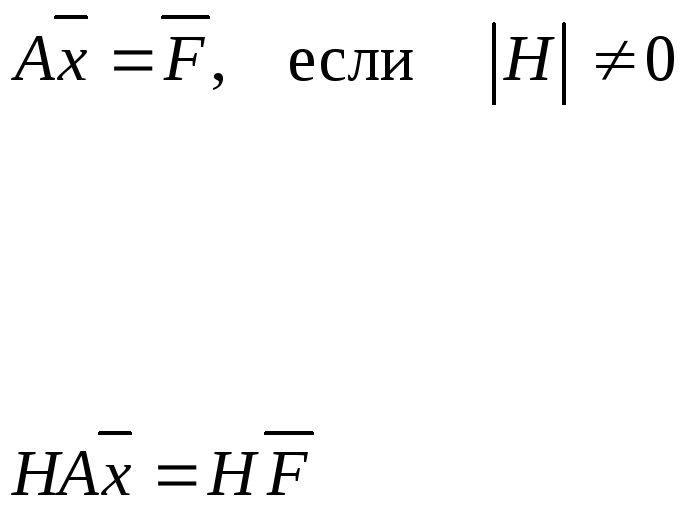
 то
две СЛАУ равносильны
то
две СЛАУ равносильны
тогда
![]()
Выбор H, чтобы все || < 1 у HA
Итерационный процесс:
1)
2) Если 1) не дало результата (процесс не стал сходиться).
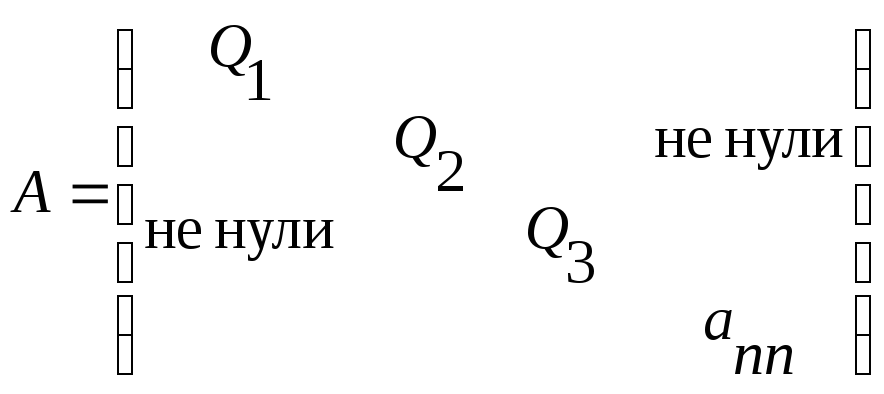
















Ищем блоки 2*2, если их нечётное количество, то останется 1 блок 1*1=ann
![]()
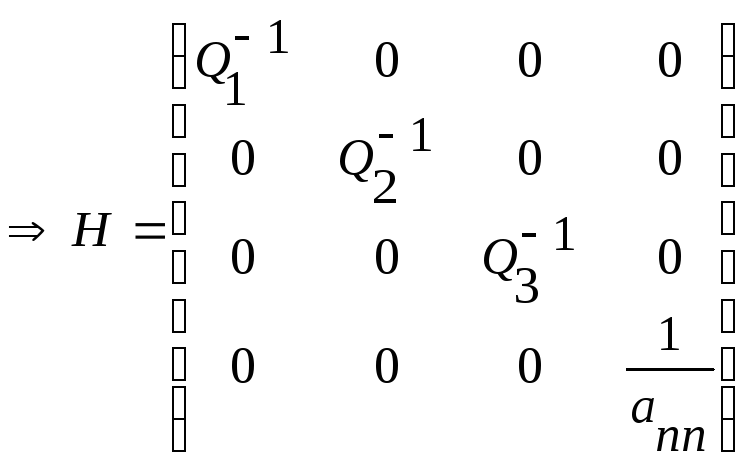












3) и т. д.
3. Численное обращение матриц методом окаймления.
А:
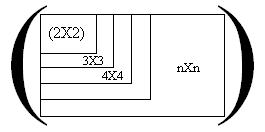
На k-ом шаге находится обратная матрица углового минора kk, при этом известна обратная матрица для предыдущего углового минора (k-1)(k-1).
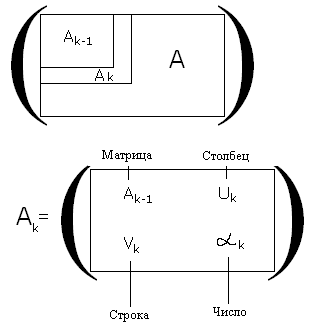
Будем искать Аk-1 в виде (матрица):
Pk-1 rk
qk 1/k
Аk*Ak-1 = E = [Ak-1 Uk; Vk k]*[ Pk-1 qk; rk 1/k] =
[Ak-1*Pk-1+Uk*qk Ak-1*rk+Uk*1/k; Vk*Pk-1+k*qk Vk*rk+k*1/k] =
= [Ek-1 0; 0 1]
(1) Ak-1*Pk-1+Uk*qk = E;
(2) Ak-1*rk+Uk*1/k = 0;
(3) Vk*Pk-1+k*qk = 0T;
(4) Vk*rk+k*1/k = 1;
Следовательно:
rk = -Аk-1-1 * Uk/k; (5)
Где Аk-1-1 известна на предыдущем шаге.
Подставим (5) в (4):
Vk*(-Аk-1-1*Uk/k) + k/k = 1; k = k - Vk*Аk-1-1*Uk;
Подставим в (5):
rk = -Аk-1-1 * Uk/k;
Выразим из (1) Pk-1 и подставим в (3):
qk = -Vk*Аk-1/k;
Pk-1 = Аk-1-1 + (Аk-1*Uk*Vk Аk-1-1)/k.
4. Преобразование Хаусхолдера.
(Для приведения матрицы n*n к виду Хессенберга ровно за n-2 итерации)
Некоторые определения (воспоминания).
D
– диагональная:
![]()
Q
– ортогональная:
![]()
R
– правая (верхняя) прямоугольная:
![]()
L
– левая (нижняя) треугольная:
![]()
H
– Хессенберга : 1) правая, верхняя
![]()
2)
левая, нижняя
![]()
Подобные матрицы: если Q, что B = QTAQ (у подобных матриц одинаковые собственные значения)
Конец воспоминаний
Выполняется n-2 шага (начиная с последней строки, и далее вверх).
На каждом шаге:
Исключаем нулевые элементы в очередной строке (j<i-1),
Пример i-ого шага: работаем со строкой l = n-i+1
До
главн. диаг. i =4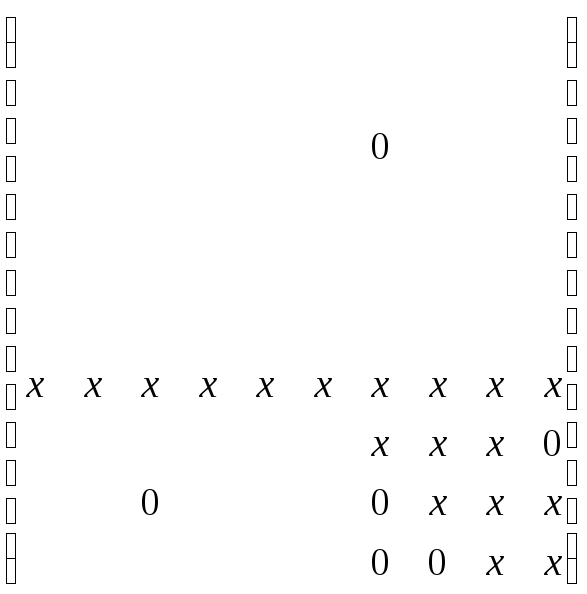



1)
Рассчитывается величина
![]()
2)
![]()
3)
![]() ( это скаляр )
( это скаляр )
4)
![]() ( это матрица)
( это матрица)
5)
![]() - (первую Р не транспонируем, т.к. матрица
симметричная)
- (первую Р не транспонируем, т.к. матрица
симметричная)
5. QR – разложение матрицы.
Задача
представить матрицу А в виде произведения:
![]() ,
где Q
– ортогональная
(
,
где Q
– ортогональная
(
![]() -- верхнетреугольная.
-- верхнетреугольная.
Теорема: Если А – верхняя матрица Хессенберга, то у неё существует
QR – разложение, и оно осуществляется последовательным уничтожением поддиагональных нулей.
![]()
Уничтожаем а21 : (в общем случае: аij, где j = i+1)
Берём
 ,
где
,
где
![]()
Получаем:
![]()
![]()
Домножим
слева на
![]()
Получим:
![]()
Алгоритм:
1)
Находим
![]()
![]()
2)
…
n-1)
![]()
6. Нахождение всех у матрицы при помощи
QR – разложения.
Первоначально матрицы надо привести к виду Хессенберга. После этого можно запускать итерационный процесс.
![]() --
раскладываем
--
раскладываем
![]() --
перемножаем
--
перемножаем
![]() --
раскладываем
--
раскладываем
![]() --
перемножаем
--
перемножаем
…
Делаем, пока сумма квадратов элементов на диагонали не станет значительно больше суммы квадратов элементов под диагональю; либо пока матрица не перестаёт меняться (этот второй критерий используется, если есть комплексно-сопряжённые ).
Свойства метода.
Свойства итерационной последовательности (А(i)).
1) В пределе получается верхне-блочнотреугольная матрица, в которой на диагонали стоят в порядке убывания, а блоки 2*2 соответствуют комплексно-сопряжённым .
2) Если исходная была симметричная матрица (при действительных ), то получится диагональная матрица, если не симметричная, то треугольная.
Скорость сходимости определяется тем, как стремятся к нулю недиагональные элементы:
Все поддиагональные элементы на каждом шаге уменьшаются, что приводит к уменьшению суммы квадратов элементов под диагональю.
7. Нахождение всех у матрицы при
помощи QR – разложения со сдвигом.
 Это
пример, когда обычный метод QR-разложения
работает медленно.
Это
пример, когда обычный метод QR-разложения
работает медленно.
Алгоритм разложения со сдвигом:
![]() --
раскладываем
--
раскладываем
![]() --
перемножаем
--
перемножаем
где
![]() -- некоторые числа.
-- некоторые числа.
Свойства метода, свойства полученной последовательности матриц
1) тот же (В пределе получается верхне-блочнотреугольная матрица, в которой на диагонали стоят в порядке убывания величины -l, а блоки 2*2 соответствуют комплексно-сопряжённым .)
2)
скорость сходимости: a
i
j
0 так же, как
![]()
0
0
Если
![]() ,
то скорость
,
то скорость
![]() -- быстрее, чем у обычного метода
-- быстрее, чем у обычного метода
Если
![]() то после (n-1)
итерации все аij
=
0.
то после (n-1)
итерации все аij
=
0.
8. Метод Рунге-Кутта 4-ого порядка.
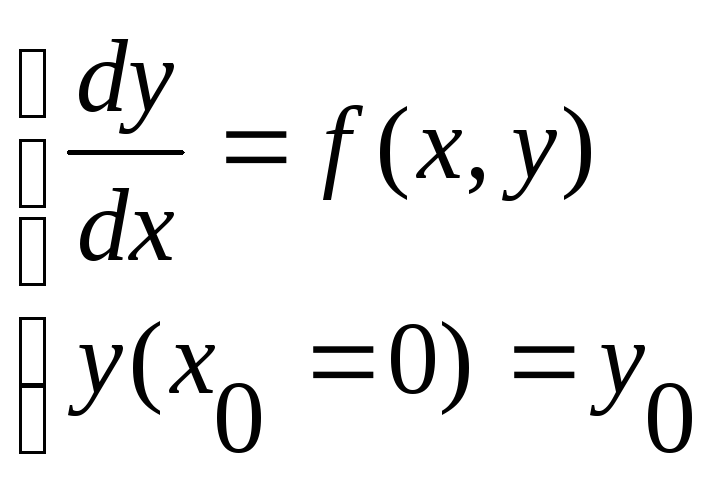
Общая часть: Поставка задачи.
1) Задача Коши
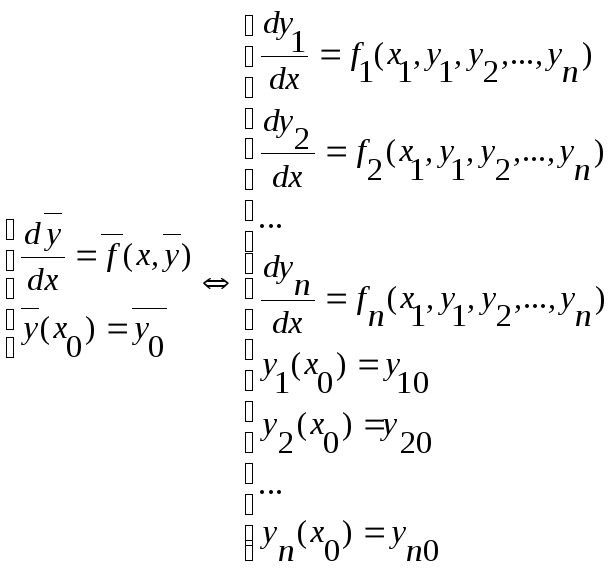
2) Система ДУ
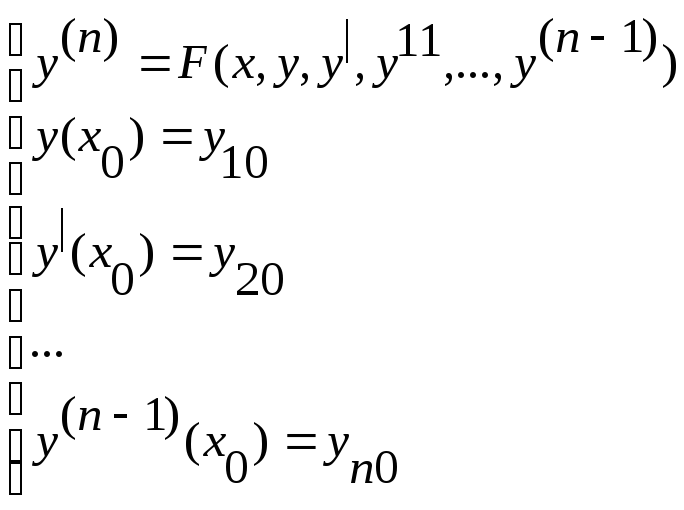
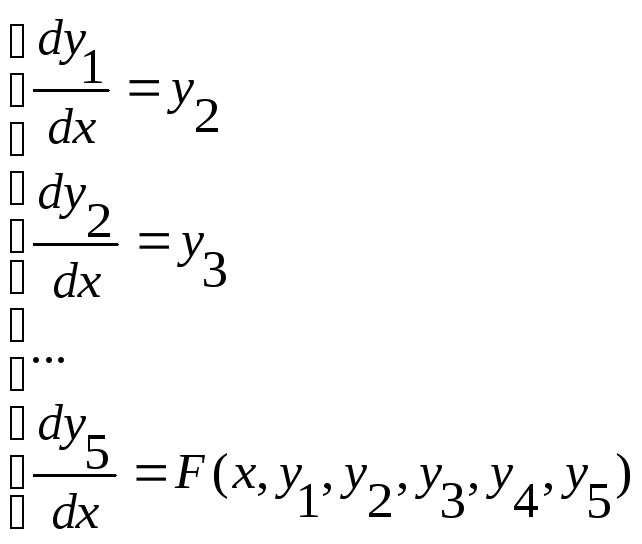
3) Уравнение с высшими производными
 тоже
Задача Коши, как 1) и 2)
тоже
Задача Коши, как 1) и 2)
1), 2), 3) – одно и тоже (один вид постановки задачи может быть преобразован к другому)
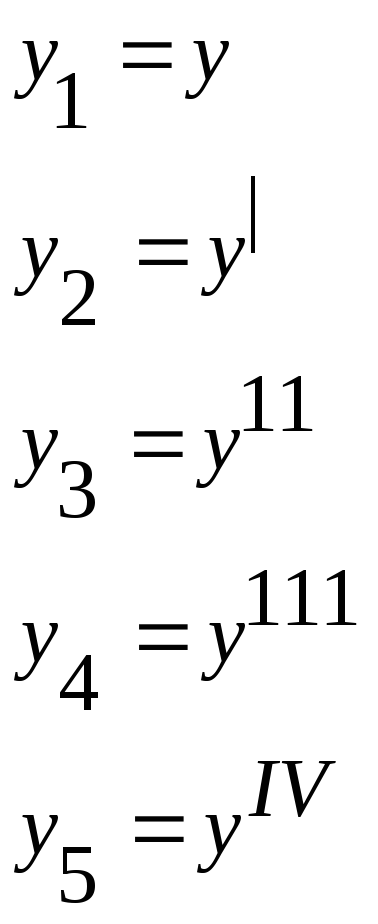
Пример этого преобразования:
Для системы 5-ого порядка:
Алгоритм Рунге-Кутта:
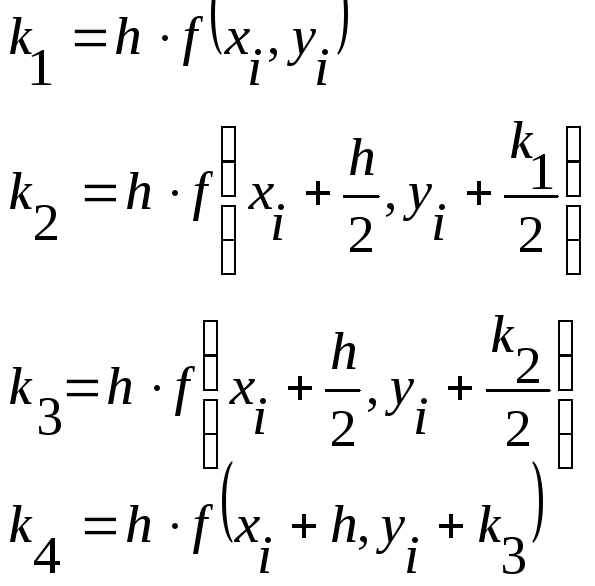
Тогда,
![]()
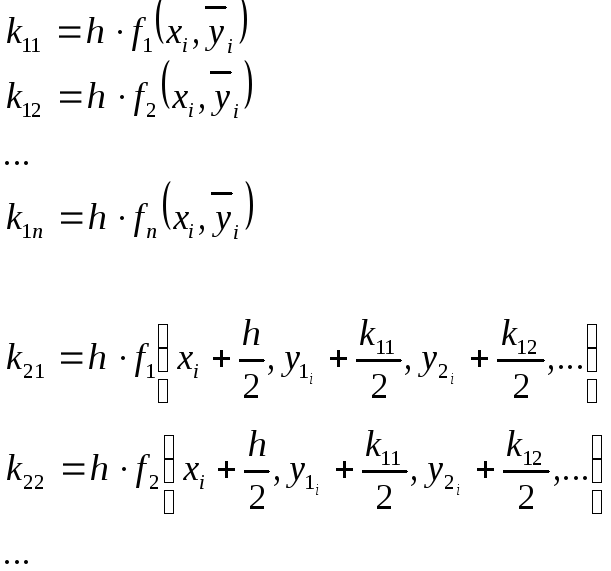
Для системы: всё точно также, только стоят вектора над k, f, y.
Распишем вектора в нормальном виде.
При описании k надо не забыть, что это 2-мерная матрица 4*n:
Критерий
устойчивости:
![]()
![]()
Критерий
точности:
![]()
(Для
многомерного случая вместо
![]() берется
берется
![]() у матрицы частных производных
у матрицы частных производных
![]() )
)
Критерий увеличения (уменьшения) шага:
(при динамическом определении шага)
![]()
если crit > порог 1, то надо уменьшить шаг, если Crit < порог 2 < порог 1, то можно шаг увеличить.
Алгоритм:
-
Считаем
 у матрицы частных производных в
у матрицы частных производных в

-
Берём
-
Делаем 1-ый шаг и считаем
-
Устанавливаем пороги:

9. Метод прогноза и коррекции 4-ого порядка.
Таких методов много, отличаются значением коэффициентов коррекции.
Алгоритм:
-
Считаем
 методом RK4
(первые 3 шага)
методом RK4
(первые 3 шага)
Дальше собственно метод:
Делаем расчёты, исходя из прогноза, для которого нужна основа, например, 4 точки (поскольку метод 4-ого порядка) в качестве начальных условий.
-
Р
 асчёт
предсказания:
асчёт
предсказания:

-
Изменение предсказания:
-
И
 зменение
производной:
зменение
производной:
-
Коррекция:

-
Значение
 в точке xi+1:
в точке xi+1:




Г арантированная
погрешность.
арантированная
погрешность.
Свойства:
-
2 раза расчёт f на каждом шаге (остальные f рассчитаны ранее)
-
П
 огрешность
< a
= o(h5)=
огрешность
< a
= o(h5)=
Достоинства метода: 1) маленькая погрешность
2) всего 2 раза высчитываем функцию.
Недостатки метода: не может работать самостоятельно, сначала надо прорешать несколько шагов методом RK.
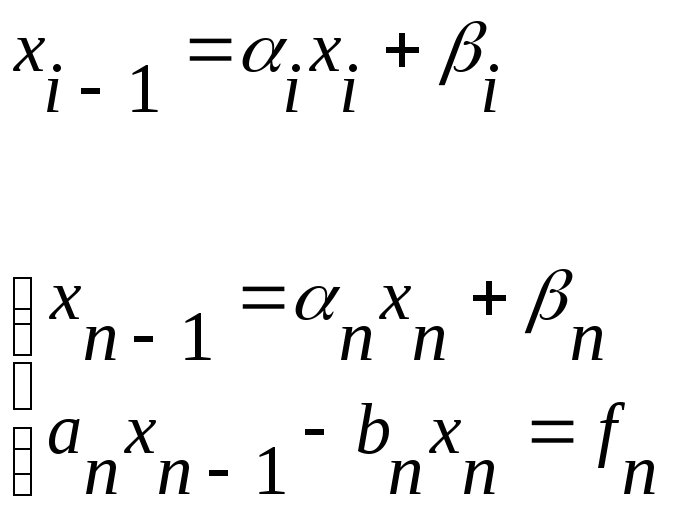
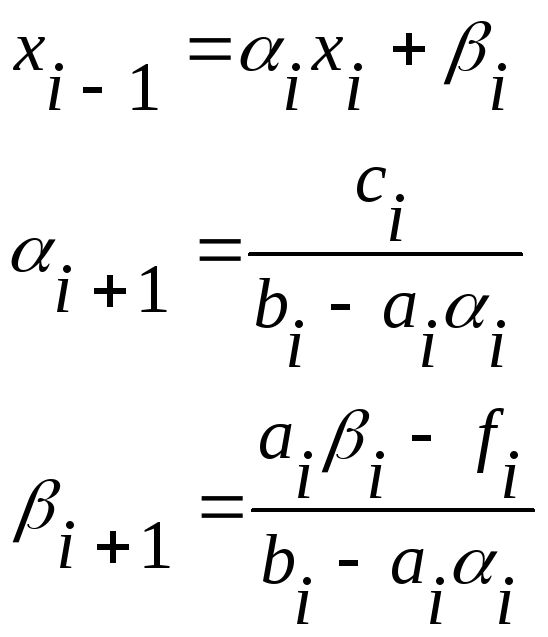
10. Решение трёх-диагональных СЛАУ методом прогонки.

Решение (алгоритм):
Ищем
решение в виде:
![]() ,
где
,
где
![]() и
и
![]() неизвестные пока функции.
неизвестные пока функции.
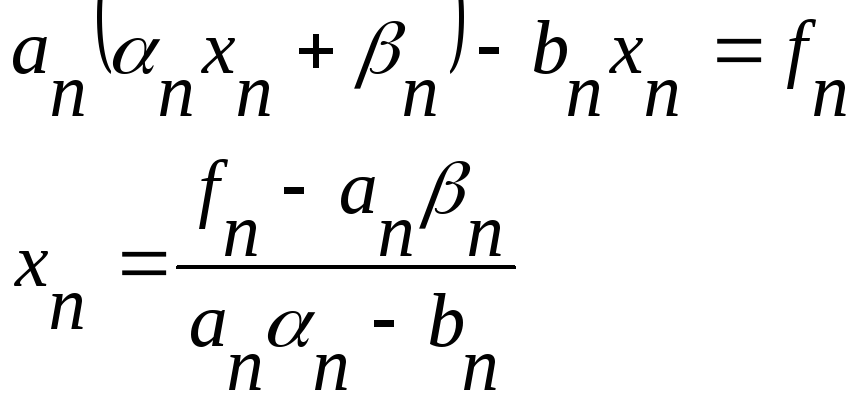
Подставим
![]() в исходную систему:
в исходную систему:
![]()
![]()
1, 1 берутся из 1-ого начального условия:
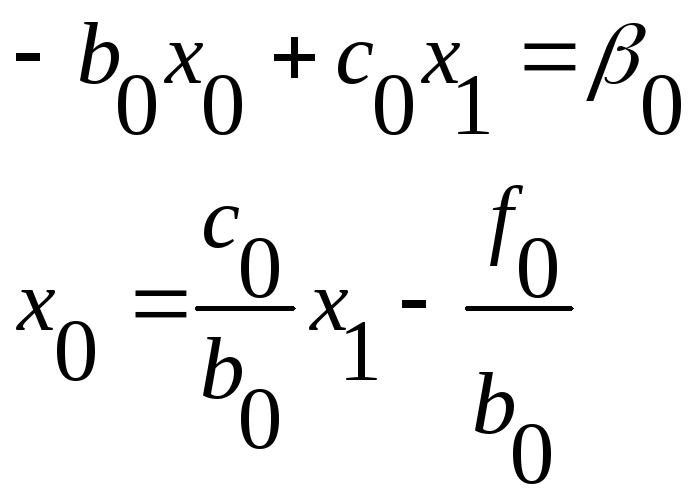








![]()
Алгоритм.
-
Находим 1, 1 из 1-ого начального условия.
-
Прямая прогонка: i = 1, 2, …, n-1
cчитаем
все
![]()
![]() i+1
и i+1
i+1
и i+1
-
И

 з
последнего начального условия находим
xn
з
последнего начального условия находим
xn -
Обратная прогонка: i = n, n-1, …, 1