

1.1. Постановка задачи и варианты ее решения
В лабораторной работе задание предполагает разработку микропроцессорной системы на базе МК семейства MCS‑51, ориентированного на обработку битовой информации.
МК получает от внешнего устройства считывания и согласования уровней показания трёх битовых датчиков, обрабатывает их в соответствии с заданной логической функцией и формирует управляющее воздействие, являющееся значением вычисленной логической функции. Значения входных переменных и соответствующее им значение функции записываются также во внутреннюю память данных МК.
В данной микропроцессорной системе работа МК и внешнего устройства никак не синхронизирована, каждое их них работает по своей программе. Для получения верного результата они (в этом частном случае) работают в режиме handshaking – синхронизируют свою работу при помощи двух осведомительных сигналов – «Разрешение» и «Подтверждение». МК может считывать значения входных логических переменных только поле того, как внешнее устройство установит их истинные значения. При этом внешнее устройство задает активный уровень сигнала «Разрешение». Когда МК дождётся установки этого уровня, он считывает значения логических переменных и оповещает об этом внешнее устройство установкой активного уровня сигнала «Подтверждение». Внешнее устройство после этого изменяет значение сигнала «Разрешение» – устанавливает пассивный уровень – и может готовиться к приёму результата. МК может выдать на выходе своего порта результат, но внешнее устройство может не заметить факт выдачи результата – новое значение может быть равно предыдущему. Единственная возможность у МК сообщить об этом – изменить уровень сигнала «Подтверждение».
В общем случае у МК для выполнения задачи обмена с внешними устройствами можно использовать любые порты. Выберем для примера порт Р1, который имеется у всех микроконтроллеров семейства MCS-51.
Каждый из сигналов от датчиков поступает на МК по определенной входной линии: X – по P1.0, Y – по P1.1, Z – по P1.2. Сигнал разрешения чтения показаний датчиков поступает по линии P1.3, а сигнал подтверждения приема МК информации выдается по линии P1.6. Результат выводится по линии P1.7.
После завершения цикла работы управление передается на обработку очередных показаний, считываемых с датчиков.
Структурная схема микропроцессорного устройства приведена на рис. 1.1. Микроконтроллер представлен на рисунке лишь своим портом Р1, распределение линий которого существенно для данной работы.
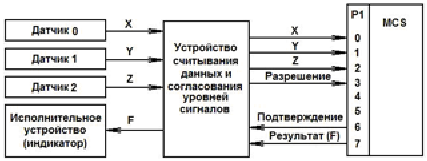
Рис. 1.1. Структурная схема микропроцессорной системы обработки битовой информации
Индивидуальные варианты заданий на выполнение лабораторной работы различаются видом логической функции, вычисляемой МК по показаниям от датчиков, а также уровнями сигналов, которыми обмениваются микроконтроллер и внешнее устройство.
Для подготовки к выполнению собственно лабораторной работы необходимо:
- изучить пример подготовки работы;
- составить в среде разработки μVision программу на языке Ассемблер МК с учетом реализации микропроцессорного устройства на универсальном лабораторном стенде;
- составить таблицу истинности логической функции, реализуемой МК.
Порядок выполнениялабораторной работы:
- отладить программу на всех наборах логических переменных с использованием программного симулятора/отладчика dScope;
- продемонстрировать работу отлаженной программы преподавателю;
- создать в системе Xilinx [5] проект, обеспечивающий подключение источников и приемников битовых сигналов к контактам порта МК;
- загрузить проект в ПЛИС универсального лабораторного стенда;
- загрузить программу в память микропроцессорной системы (МПС) стенда;
- отладить работу спроектированного микропроцессорного устройства на УЛС с использованием управляющей программы MCS51;
- продемонстрировать работу отлаженной программы преподавателю;
- ответить на вопросы преподавателя.