

3.9 Индукционные датчики
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Они относятся к датчикам генераторного типа. Принцип действия индукционных датчиков основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
Основным отличием индукционных датчиков от индуктивных является то, что в них используется постоянное магнитное поле, а не переменное (питание индуктивных датчиков осуществляется от сети переменного тока). Постоянное магнитное поле в индукционных датчиках создается двумя способами:
постоянными магнитами;
катушкой, обтекаемой постоянным током.
На рисунке 14,а показана схема датчика с обмоткой W2, размещенной в воздушном зазоре, в котором постоянный магнитный поток Ф создается катушкой W1, включенной на постоянное напряжение U=.

Рисунок 14
При перемещении катушки в магнитном поле в ней индуцируется ЭДС, пропорциональная скорости перемещения:
![]() ,
,
где k – коэффициент пропорциональности, зависящий от числа витков W2 и конструктивных параметров датчика.
На рисунке 14,б показан датчик, в котором постоянный магнитный поток создается с помощью постоянного магнита с полюсными наконечниками. ЭДС, индуцируемая во вращающейся катушке, пропорциональна скорости вращения Ω:
![]() .
.
В обоих этих датчиках катушки подвижны, поэтому для отвода от них выходного сигнала (ЭДС) необходимы гибкие токоподводы или контактные кольца со щетками.
Индукционный датчик может быть выполнен и другой конструкции: с неподвижной катушкой и вращающимся постоянным магнитом (рисунок 14,в). Надежность при этом повышается за счет отсутствия скользящего контакта.
Возможен и другой способ повышения надежности датчика по схеме (рисунок 14,б): и катушка, и постоянный магнит неподвижны, а в зазоре между ними вращается ферромагнитное кольцо с вырезами (рисунок 14,г) или иной элемент, имеющий существенно разную магнитную проводимость по взаимно перпендикулярным осям. При вращении изменяется поток, пронизывающий плоскость катушки.
В датчиках (рисунок 14, б,в,г) в качестве выходного сигнала можно использовать частоту ЭДС. Принцип их действия по существу такой же, как у синхронных генераторов. Для измерения частоты вращения используются и специальные электрические машины малой мощности – тахогенераторы.
Тахогенератор постоянного тока (рисунок 15,а) имеет обмотку возбуждения, создающую при питании постоянным током магнитный поток Ф. При вращении якоря в нем создается ЭДС, пропорциональная частоте вращения n:
![]() ,
где k
– постоянная, определяемая конструкцией.
,
где k
– постоянная, определяемая конструкцией.
С помощью коллектора и щеток выходной сигнал подается на нагрузку в виде выпрямленного напряжения.
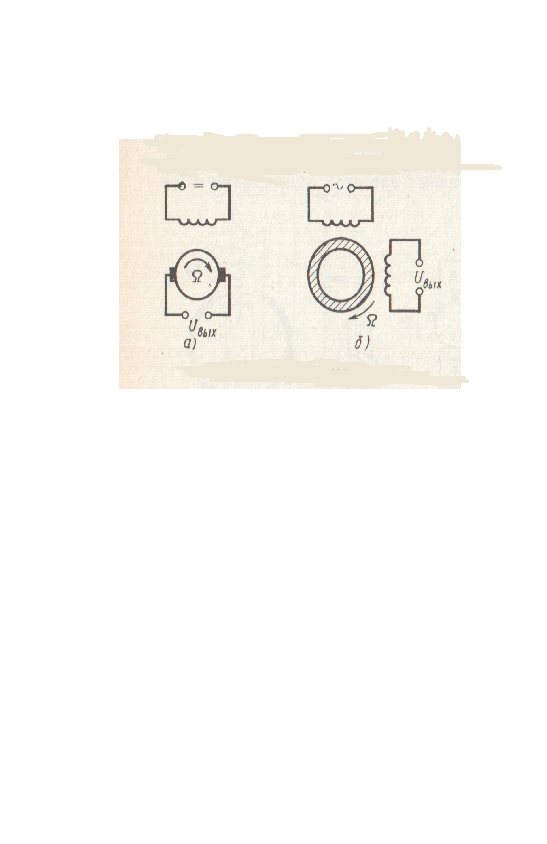
Рисунок 15
Тахогенератор переменного тока (рисунок 15,б) имеет на статоре две обмотки, сдвинутые одна относительно другой на 90 электрических градуса. Одна обмотка включается в сеть переменного тока. При вращении ротора, выполненного в виде тонкостенного электропроводящего цилиндра, в другой обмотке наводится переменная ЭДС, которая пропорциональна частоте вращения n. Для повышения температурной стабильности в качестве материала полого ротора используется константан.
Тахогенераторы обладают высокой чувствительностью и мощностью выходного сигнала. Общим недостатком всех генераторных датчиков является зависимость выходного сигнала от сопротивления нагрузки.