

3 Электромагнитные датчики
3.1 Назначение. Типы электромагнитных датчиков
Электромагнитные датчики предназначены для преобразования перемещения в электрический сигнал за счет изменения параметров электромагнитной цепи. Эти изменения могут заключаться, например, в увеличении или уменьшении магнитного сопротивления RМ магнитной цепи датчика при перемещении сердечника. Если перемещается не сердечник, а обмотка, то происходит изменение потокосцепления обмотки.
Таким образом, изменения в электромагнитной цепи датчика могут быть вызваны:
перемещением элемента магнитной цепи (сердечника или якоря);
перемещением элемента электрической цепи (обмотки).
В результате таких перемещений изменяется индуктивность обмотки L или ее взаимоиндуктивность М с обмоткой возбуждения. Поэтому в технической литературе электромагнитные датчики часто называют индуктивными.
Электромагнитные датчики обычно рассматривают как параметрические, поскольку величины L и М зависят от перемещения х: L = ƒ(x), М = ƒ(х). Но электромагнитные датчики с изменяющейся взаимоиндуктивностью можно отнести и к генераторному типу, поскольку в результате изменяется и ЭДС обмотки, т.е. Е = ƒ(х).
Изменение индуктивности и взаимоиндуктивности может происходить и под влиянием механических напряжений в сердечнике электромагнитного датчика. Такие напряжения приводят к изменению магнитной проницаемости ферромагнитного материала сердечника. Электромагнитные датчики, основанные на таком физическом явлении, называются магнитоупругими датчиками.
Так как ЭДС в выходной обмотке появляется за счет изменения коэффициента взаимоиндукции с обмоткой возбуждения, то такие электромагнитные датчики называют трансформаторными. Ведь обмотку возбуждения можно рассматривать как первичную обмотку трансформатора, а выходную обмотку – как вторичную.
К генераторным датчикам относятся и индукционные датчики, в обмотках которых генерируется ЭДС в зависимости от скорости перемещения: Е = ƒ(dx/dt).
С помощью электромагнитных датчиков можно автоматически измерять:
механические силы;
давление;
температуру;
свойства магнитных материалов;
определять внутренние полости и трещины в деталях (дефектоскопия);
толщину немагнитных покрытий на стали;
расход жидкостей и газов в трубопроводах и др.
Достоинства электромагнитных датчиков:
простота и дешевизна;
механическая прочность;
высокая надежность за счет возможности съема выходного сигнала без скользящих контактов;
возможность питания от промышленной сети частотой 50 Гц;
возможность получения достаточно высокой мощности выходного сигнала;
возможность работы как в диапазоне малых (доли мм), так и больших (метры) перемещений.
Недостатки электромагнитных датчиков:
влияние на выходной сигнал внешних электромагнитных полей и частоты питающего напряжения;
возможность работы только на переменном токе (питание постоянным током возможно лишь для индукционных датчиков, рассматриваемых ниже).
3.2 Принцип действия и основы расчета индуктивных датчиков
Простейший индуктивный датчик представляет собой дроссель с переменным воздушным зазором в магнитопроводе. На рисунке 1 показаны две наиболее распространенные конструктивные схемы индуктивных датчиков на одном сердечнике. Это одинарные индуктивные датчики.
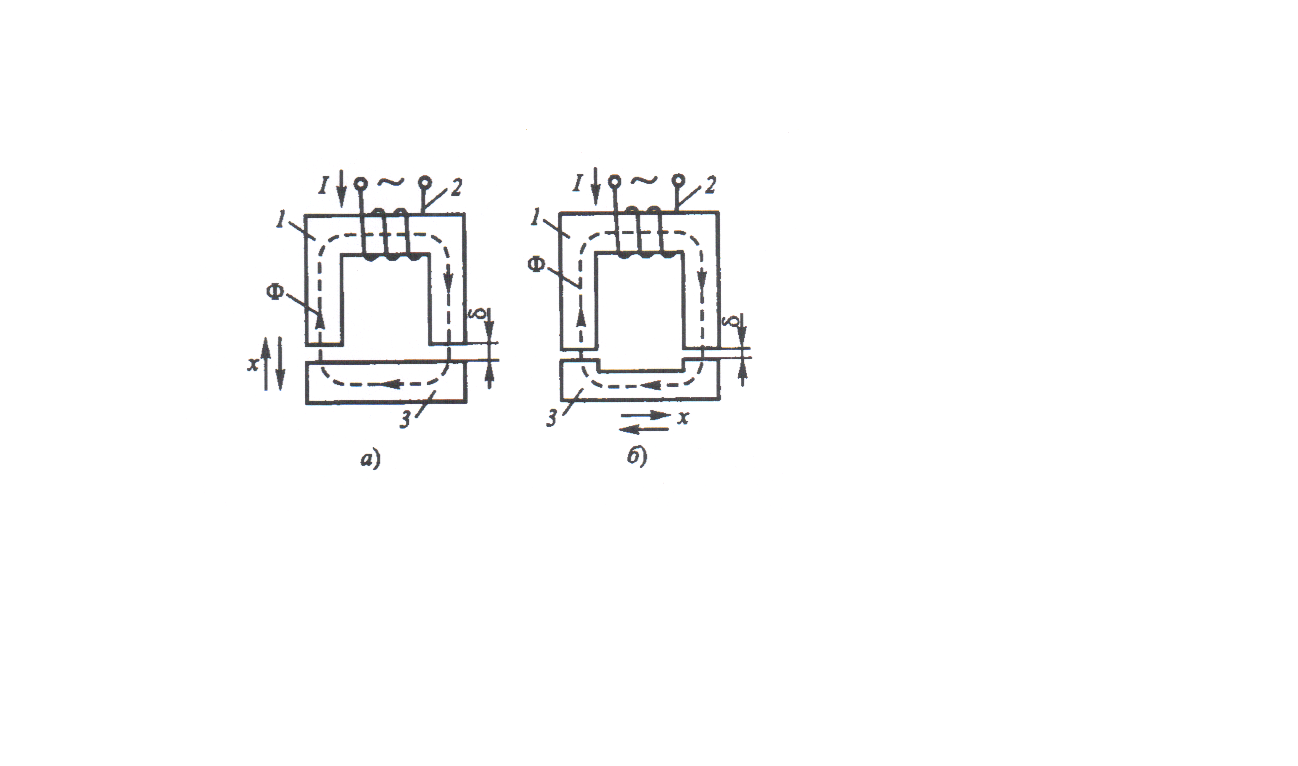
Рисунок 1
На сердечнике 1 из электротехнической стали размещена обмотка 2, подключаемая к источнику переменного напряжения. Магнитный поток в сердечнике замыкается через якорь 3, который может перемещаться относительно сердечника 2. Якорь 3 механически связан с деталью, перемещение которой необходимо измерить. Эта деталь на рисунке не показана, но перемещение х ее может происходить в вертикальном направлении (рисунок 1, а) или в горизонтальном направлении (рисунок 1, б).
Перемещение якоря изменяет магнитное сопротивление магнитной цепи, состоящей из сердечника, якоря и воздушного зазора δ. Следовательно, изменится индуктивность обмотки 2. поскольку эта обмотка включена на переменное напряжение, ток в обмотке 2 будет определяться ее полным сопротивлением, в которое входит и индуктивное сопротивление. С увеличением воздушного зазора магнитное сопротивление увеличивается, а индуктивность, индуктивное и полное сопротивления уменьшаются (рисунок 2, а).
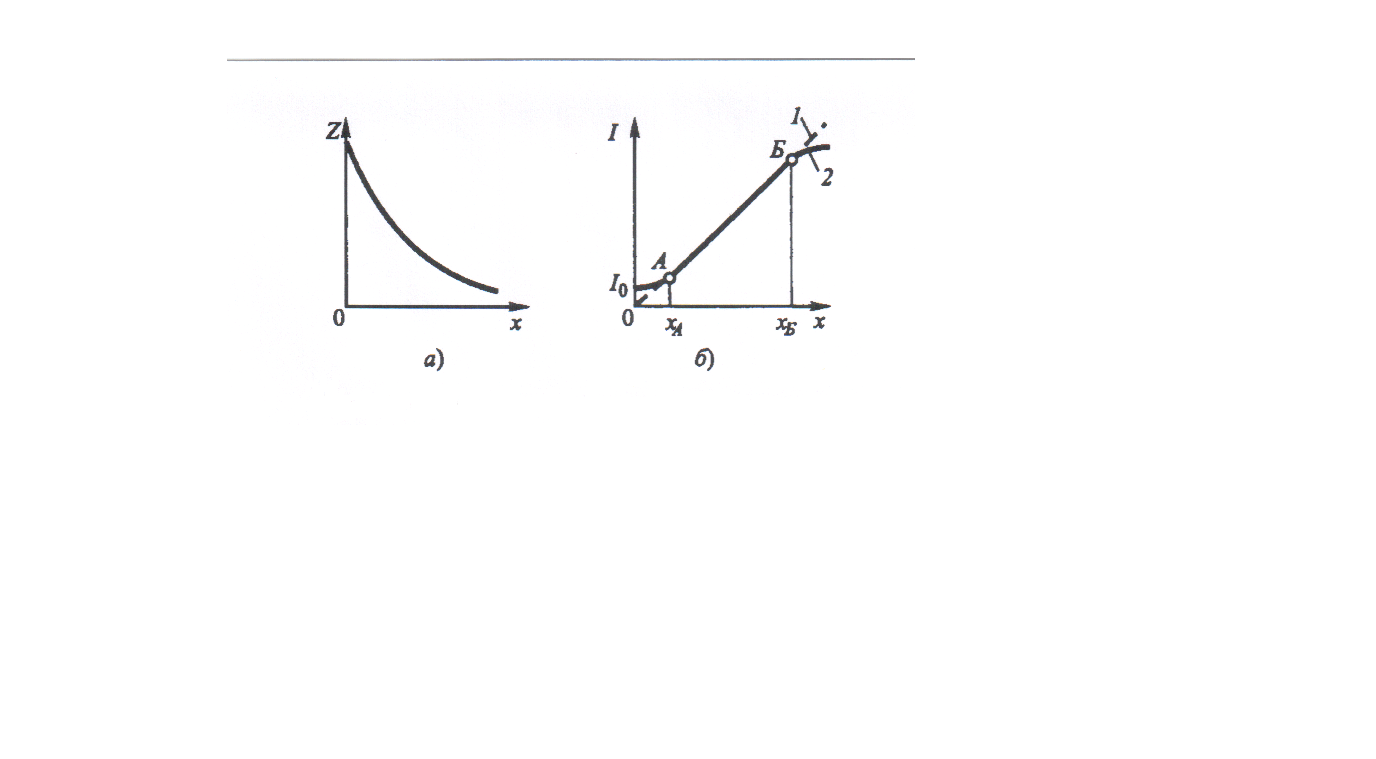
Рисунок 2
Следовательно, ток в обмотке увеличивается (рисунок 2, б). Полагая ток I в обмотке за выходной сигнал, а перемещение х - за входной сигнал, имеем выходную статическую характеристику в виде графика I = ƒ(х).
Найдем выражение, определяющее зависимость тока в обмотке датчика от перемещения. Анализ проведем применительно к конструктивной схеме, показанной на рисунке 1, а. В этом случае приращение перемещения х всегда равно приращению зазора δ, поэтому нам необходимо получить математическую зависимость тока I от зазора δ: I = ƒ(δ).
Пусть
обмотка датчика включена на напряжение
питания:
![]() ,
где
,
где
U
– действующее значение напряжения; ω
– угловая частота, рад/с. По закону Ома,
действующее значение тока в обмотке
![]() ,
гдеZ
– полное сопротивление обмотки датчика,
Ом, состоящее из активного R
и индуктивного XL
сопротивлений:
,
гдеZ
– полное сопротивление обмотки датчика,
Ом, состоящее из активного R
и индуктивного XL
сопротивлений:
![]() .
Индуктивное сопротивление ХL
пропорционально индуктивности L
и частоте питания ƒ:
.
Индуктивное сопротивление ХL
пропорционально индуктивности L
и частоте питания ƒ:
![]() .
После подстановки имеем
.
После подстановки имеем
![]() .
.
Индуктивность обмотки датчика с числом витков W
![]() ,
,
где Ф – магнитный поток сердечника, Вб. Принимаем, что весь магнитный поток проходит через воздушный зазор, т.е. потоки рассеяния отсутствуют. Тогда
![]() .
.
Здесь: RM – магнитное сопротивление магнитопровода датчика, (Гн)-1.
Это сопротивление слагается из сопротивления стали сердечника и якоря RСТ и сопротивления воздушного зазора Rδ:
![]()
Сопротивление воздушного зазора пропорционально удвоенной длине воздушного зазора δ, поскольку магнитный поток проходит через воздушный зазор дважды:
![]() ,
,
где SM – поперечное сечение воздушной части магнитопровода, равное активной площади поперечного сечения сердечника в зоне воздушного зазора, м2; μ0 = 4π∙10-7 Гн/м – магнитная проницаемость воздуха.
После подстановок получим
![]() .
.
Выражение для индуктивности
![]() .
.
Индуктивное сопротивление
![]() .
.
Полное сопротивление обмотки
 .
.
Анализ последней формулы показывает, что с увеличением воздушного зазора (а следовательно, и перемещения) полное сопротивление уменьшается, стремясь в пределе к величине активного сопротивления обмотки R.
Зависимость полного сопротивления обмотки от величины воздушного зазора показана на рисунке 2,б. Ток в обмотке датчика
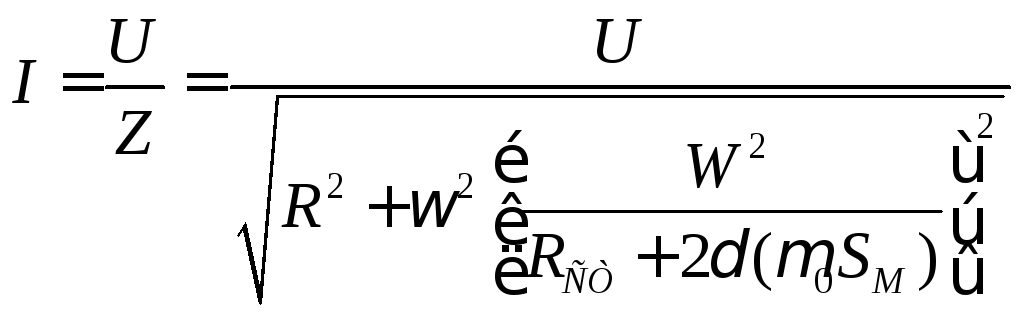 .
.
Если входным сигналом датчика считать перемещение якоря х от начального положения при δ = 0 в сторону увеличения зазора, то формула для тока после замены δ на х представляет собой статическую характеристику одинарного индуктивного датчика, т.е. I = ƒ(х).
Одинарные индуктивные датчики имеют ряд существенных недостатков:
на его якорь действует сила притяжения к сердечнику. Эта сила вносит погрешность в работу датчика тем большую, чем меньше перестановочное усилие детали, перемещение которой надо измерить;
при изменении знака входного сигнала не меняется знак выходного сигнала (т.е. датчик не является реверсивным);
диапазон изменения входного сигнала, при котором сохраняется линейность статической характеристики, невелик.
Применение:
в качестве бесконтактных датчиков положения и концевых выключателей при управлении механизмами, имеющими значительные перестановочные усилия.