

Системы координат применяемые в фотограмметрии
Основная задача фотограмметрии – определить координаты точек объекта по их изображениям на снимках. Для этого необходимо выполнить измерения на снимках и установить связь между системой координат в которой выполнялись измерения и системой координат используемой на местности.
Системы координат:
СК снимка
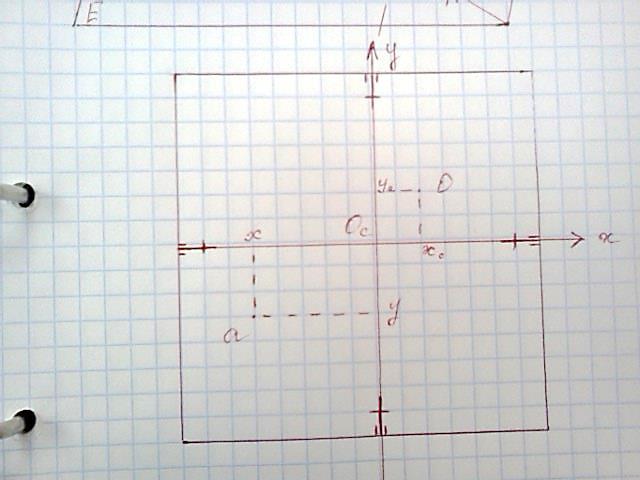

Система координат снимков задается координатными метками.
Oс – начало системы координат
Oc xy – плоскость снимка
a(x, y) - Координаты точки a в системе координат снимка
xo, уо – в системе координат снимка
f, yo, xo элементы внутреннего ориентирования снимка. Они определяют положение точки картографирования С относительно системы координат снимка и позволяют восстановить связку лучей существовавшую в момент съемки. Определяются заводом изготовителем и записываются в паспорт
Пространственная СК съемочной камеры
S, x,y,я - Пространственная система координат съемочной камеры. Начало которой находится в точке фотографирования S. Оси x, y направлены параллельно осям x, y снимка, а ось z направлена вдоль главного луча (перпендикулярно плоскости снимка)
Внешняя система координат – система в которой определяются координаты точек местности. Она мб задана условно, но чаще всего используется в геодезической СК.

Ог, x(г), y(г), z(г) – Внешняя СК (геодезическая), которую фотограмметристы называют геодезической
Фотограмметрическая система координат

SXYZ – фотограмметрическая СК
Начало в точке S
α –– угол между осью Z и проекцией главного луча на плоскость xZ
ω – поперечный угол – угол между главным лучом и плоскостью xZ
ᴂ - угол разворота снимка – угол в плоскости снимка между осью y и следом плоскости проходящей через главный луч SО и ось Y
Положение
системы Sxyz
относительно системы SXYZ
описывается матрицей поворота А;
 , гдеabc
– направляющие косинусы.
, гдеabc
– направляющие косинусы.









В системе координат снимка a (x,y)






… элементы внешнего ориентирования снимка (ЭВО - 6 штук; 3 – угловые (α, ω, ᴂ), 3 - линейные)
Таким образом, с помощью элементов внутреннего, устанавливается связь между СК
Связь координат точки местности и координат точки на снимке

A (x, y) – координаты точки на снимке
A (X, Y, Z) – координаты точки на местности
 –вектор
определения положения точки
S
во внешней
СК
–вектор
определения положения точки
S
во внешней
СК
 –вектор
определения положения точки
А во внешней
СК
–вектор
определения положения точки
А во внешней
СК
 –вектор
определяющий положение точки «a»
в СК камеры
–вектор
определяющий положение точки «a»
в СК камеры
 -
вектор определяющий положение точки
«A»
в СК камеры
-
вектор определяющий положение точки
«A»
в СК камеры
 –коллинеарные
=> имеет место условие коллинеарности
–коллинеарные
=> имеет место условие коллинеарности
 ,
где N
– скалярная величина
,
где N
– скалярная величина


Из условия коллинеарности следует, что координаты векторов пропорциональны поэтому:



Анализ полученных формул показывает что одиночному снимку нельзя определить пространственные координаты точки если не известна скалярная величина N или высоты точек местности Z.
Математическую
модель описывающую поверхность
 называютцифровой
моделью рельефа (ЦМР)
называютцифровой
моделью рельефа (ЦМР)
Таким образом по одному снимку можно определить координаты (x, y) точек местности, если известны точки внешнего и внутреннего ориентирования снимка и значения высот точек местности Z

Обратная связь координат точек снимка и местности
A (X*, Y*, Z*) – в СК съемочной камеры






Связь координат между точками координаты которых измерены на снимке и координатами точки объекта во внешней системе координат