

ЭЛЕКТРИЧЕСКИЙ ПРИВОД Учебное пособие
.pdf
|
|
|
|
31 |
|
|
|
|
|
|
|
|
Наконец, принимая жесткими все звенья системы, система (2.8) преоб- |
||||||||||||
разуется в уравнение движения одномассовой модели (рис. 2.8, а) жесткой |
||||||||||||
механической СЭП: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
d ωд = M |
д |
− M |
с |
, |
|
|
(2.10) |
||
|
|
|
пр |
dt |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
которое получило название основного уравнения динамики привода. Здесь Mд |
||||||||||||
и Мс – электромагнитный момент и момент статических сопротивлений, при- |
||||||||||||
веденный к валу двигателя, Jпр – |
приведенный момент инерции всей системы. |
|||||||||||
Полезно заметить, что Jпр dw/dt = Мдин называют динамическим момен- |
||||||||||||
том. Его действие проявляется только при dw/dt ¹ 0, т.е. в переходных (ди- |
||||||||||||
намических) режимах привода. В установившемся режиме ускорение равно |
||||||||||||
нулю, поэтому из уравнения (2.10) получаем Mд = Мс, т.е. движущий момент |
||||||||||||
уравновешивается моментом статических сопротивлений электропривода. |
||||||||||||
|
2.9. Статическая устойчивость электропривода |
|
|
|||||||||
Рассмотрим основное уравнение движения электропривода (2.10) при |
||||||||||||
наличии Mд и Мс, зависимых от скорости w (рис. 2.9). Эти зависимости харак- |
||||||||||||
теризуются коэффициентами жесткости: |
|
|
|
|
|
|
|
|
||||
|
|
bд = |
M д |
и bс = |
|
M с . |
|
|
(2.11) |
|||
|
|
|
|
Dw |
|
|
|
Dw |
|
|
|
|
Как уже говорилось ранее, установившийся режим работы привода воз- |
||||||||||||
никает при равенстве моментов Mд = Мс, т. е. в точках А и В. Но не все уста- |
||||||||||||
новившиеся режимы бывают устойчи- |
|
|
ω |
|
|
|
Mc |
|
||||
выми. Так, если в системе обеспечить |
|
|
|
Δω |
|
|
||||||
|
|
|
|
|
γдА |
|
||||||
импульсное |
приращение |
скорости |
|
|
ωА |
|
|
А |
|
|||
Dw> 0, то это будет соответствовать |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||
возникновению в окрестности точки В |
|
|
|
|
γсА |
|
Mд |
|
||||
движения с Мдин > 0, еще более уда- |
|
|
|
|
|
|
|
|||||
|
|
|
|
ω |
|
|
|
|||||
ляющего систему от состояния равно- |
|
|
ωB |
|
В |
|
|
|||||
весия. Такое же приращение скорости |
|
|
|
|
|
|
||||||
вблизи точки А соответствует возник- |
|
|
|
|
γдВ |
|
γсВ |
M |
||||
новению Мдин < 0 и замедлению дви- |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||
жения, что приводит к «сползанию» |
|
|
|
|
|
|
|
|
||||
системы в точку А. Таким образом, |
|
|
|
|
Рис. 2.9 |
|
|
|||||
устойчивое |
равномерное |
движение |
|
|
|
|
|
|
||||
привода с приведенными зависимо- |
|
|
|
|
|
|
|
|
||||
стями Mд и Мс на рис. 2.9 находится в точке с угловой скорость wА. |
|
|||||||||||
32
Условие механической устойчивости системы электропривода в математической форме записи можно выразить через коэффициенты жесткости характеристик Mд и Мс:
βд < βc.
Действительно, определяя графически жесткость механических характеристик как тангенс угла наклона γ между осью ординат ω и касательной к рассматриваемой характеристике в точках А и В (β=tgγ), получим βдА< βсА и βдВ> βсВ.
По степени жесткости механические характеристики можно разделить на:
1)абсолютно жесткие с постоянной угловой скоростью при изменении момента (β = ∞). Такой характеристикой обладают синхронные двигатели (кривая 1 на рис. 2.4, а).
2)жесткие со сравнительно небольшим падением угловой скорости при увеличении момента (β = 10÷100). Жесткие характеристики имеют двигатели постоянного тока с независимым возбуждением и асинхронные двигатели в линейной части (кривые 2 и 3 на рис. 2.4, а соответственно).
3)мягкие со значительным изменением угловой скорости при изменении момента (β < 10). Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения с небольшим статическим моментом на валу (кривая 4 на рис. 2.4, а).
4)абсолютно мягкие с постоянным моментом при изменении угловой
скорости ω (β = 0), получаемые в замкнутых СЭП, работающих на упор (экскаваторные характеристики).
Величина, обратная жесткости, называется крутизной механической характеристики:
α = 1/β,
значение которой тем больше, чем мягче характеристика.
2.10. Режимы работы электропривода
Рассмотрим режимы работы СЭП по основному уравнению движения (2.10).
1.Если в системе действуют оба момента и |Мд| > |Мс| (рис. 2.10, з), то происходит ускорение движения РО до установившейся угловой ско-
рости ωд = ωc < ω0 (ω0 – угловая скорость идеального холостого хода) – двигательный режим работы (Д), характеристики которого располагаются в I и III квадрантах (рис. 2.10, ж), где полезная (механическая) мощность имеет положительный знак Pмех = Мω > 0. При этом поступающая из сети электрическая мощность Pс (рис. 2.10, а) в основном преобразуется в механическую и частично теряется в ЭДУ и ПУ

33
(Dp = Dpд + Dpп, где Dpд и Dpп – соответственно потери в ЭДУ и ПУ). В теории электрических машин ЭДУ называют электромеханическим преобразователем (ЭМП), поэтому полное преобразование энергии в ЭДУ и ПУ условно обозначим ЭМП’.
2.Если |Мд| < |Мс| (рис. 2.10, и), то движение РО замедляется и при достаточно большом моменте Мс угловая скорость может сменить знак
wд < 0, а момент двигателя Мд будет противодействовать моменту сопротивления. Такой режим работы называется торможением противовключением, соответствующий II и IV квадрантам (рис. 2.10, ж), где Pмех = Мw< 0 – направление потока механической энергии меняется на противоположное (рис. 2.10, б), и вся поступившая в двигатель мощность Pс и Pмех преобразуется в потери. Поэтому такой режим работы также называют генераторным режимом работы последовательно с сетью. Обозначим его как Г-П.
Pc |
Д |
Pc Г-П |
ЭДУ Pв |
Pмех |
Pмех |
(ЭМП) |
ПУ |
ЭМП |
|
|
|
pд |
pп |
p |
аб
|
|
ω |
II |
|
I |
|
|
ХХ |
|
Г |
Д |
Mω < 0 |
Mω> 0 |
|
M < 0 |
ω > 0 M > 0 ω > 0 |
|
|
ДТ |
КЗ |
Mω > 0 |
0 Mω< 0 M |
|
M < 0 |
ω< 0 M > 0 ω < 0 |
|
ДГ
III |
IV |
ж
Pc |
Г-Р |
ДТ |
|
ХХ |
Pc |
|
КЗ |
Pc |
|
|
|
|
|
||||
ЭМП Pмех |
ЭМП |
Pмех |
ЭМП |
Pмех |
ЭМП |
|||
p |
|
p |
|
|
p |
|
|
p |
в |
|
г |
|
д |
|
|
е |
|
Д |
|
|
Г-П |
|
|
Г-Р |
|
|
Mд |
|
Mд |
|
Mд |
|
ωд>ω0 |
||
|
ωд< ω0 |
ωд< 0 |
|
|
||||
Mc |
з |
Mc |
и |
|
Mc |
|
к |
|
|
|
|
|
|||||
ДТ |
|
|
ХХ |
|
|
КЗ |
|
|
|
|
Mд |
|
|
Mд |
ωд= 0 |
||
|
|
|
|
|
|
|||
|
ωд→0 |
ωд= ω0 |
|
|
||||
|
|
|
|
|
||||
Mc |
л |
|
м |
|
Mc =Mкз |
н |
||
|
|
|
|
|
|
|||
Рис. 2.10 |
|
|
|
|
|
|
|
|
3.Если |Мд| ¹ 0 и |Мс| ¹ 0, но статический момент изменит знак (будет помогать движению, как показано на рис. 2.10, к), то угловая скорость
может превысить w0 и двигатель перейдет в генераторный режим,
34
также соответствующий II и IV квадрантам (рис. 2.10, ж). Двигатель в таком режиме работает как генератор электрической энергии параллельно с сетью, отдавая в сеть электрическую мощность Pс (рекуперация энергии на рис. 2.10, в). Момент двигателя Мд противодействует моменту сопротивления Мс (дальнейшему росту скорости), поэтому такой генераторный режим работы называют режимом рекуператив-
ного торможения (Г-Р).
4.При |Мд| = 0 (рис. 2.10, л) двигатель благодаря запасу кинетической энергии будет продолжать вращаться, но под действием статического момента его скорость будет стремиться к нулю. Если каким-либо образом обеспечить протекание тока в обмотках двигателя, то создаваемый им момент будет способствовать торможению – режим динамиче-
ского торможения (ДТ). Характеристики такого режима также лежат во II и IV квадрантах (режим работы автономным – не связанным с сетью – генератором), но проходят через начало координат (рис. 2.10, ж). Подводимая к валу механическая энергия преобразуется
впотери (рис. 2.10, г).
5.При |Мс| = 0 (рис. 2.10, м) двигатель работает без нагрузки и, если пре-
небречь или скомпенсировать потери p (рис. 2.10, д), то угловая скорость ωд = ω0 – режим холостого хода (ХХ), рабочие точки которого расположены на оси ординат (рис. 2.10, ж).
6.Если к валу двигателя приложен момент |Мс| = Мкз, в результате которого скорость двигателя равна нулю (двигатель заторможен), и вся по-
требляемая энергия сети Pс превращается в потери (идет на нагрев двигателя), то такой режим работы называется режимом короткого замыкания (КЗ), рабочие точки которого лежат на оси абсцисс
(рис. 2.10, ж).
2.11. Учет потерь в элементах электропривода
Суммарные потери в СЭП складываются из электрических потерь в
ЭПУ pэ = Pc – Pэпу, потерь в ЭДУ pд = Pэпу – Pв и механических потерь в ПУ pп = Pв – Pмех, которые следует учитывать при преобразовании и передачи энергии в СЭП. Уравнение энергетического равновесия можно записать как
Pс = Pэпу + |
pэ = Pв + pэ + pд = Pмех + pэ + pд + pп , |
где Pс, Pэпу, Pв и Pмех – |
соответственно мощность сети, выходная мощность |
ЭПУ, мощность на валу ЭДУ и мощность на выходном элементе ПУ.
Потери можно оценить коэффициентом полезного действия (КПД)
СЭП:

35
ηсэп = Pмех
Pс
или
ηсэп = ηэηдηп ,
где ηэ = Pэпу / Pс , ηд = Pв / Pэпу и ηп = Pмех / Pв – КПД ЭПУ, ЭДУ и ПУ соответственно.
КПД ЭПУ определяется в основном электрическими потерями и равен обычно 0,95÷0,98 у полупроводниковых преобразователей или общему КПД электромашинных преобразователей электроэнергии. Последние из-за больших массо-габаритных показателей и низких КПД в настоящее время практически не используются.
КПД ЭДУ характеризует его эффективность как ЭМП, а его значения находятся в диапазоне 0,4÷0,95. Фактическая величина КПД ЭДУ отличается от номинального (паспортного) значения ηдн и изменяется в зависимости от
отношения фактической мощности на валу P |
и номинальной (паспортной) |
||
|
|
вX |
|
мощности Pв н: |
|
||
X = |
PвX |
, |
(2.12) |
|
|||
|
Pв н |
|
|
где X – коэффициент загрузки ЭДУ.
Поэтому коэффициент ηдХ при частичной загрузке ЭДУ следует опре-
делять по кривой КПД, приводимой в каталогах соответствующих двигателей (рис. 2.11, а). Если такой кривой нет, то поступают следующим образом.
ηд |
|
|
ηдmax |
dп |
|
|
|
|
1,0 |
|
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
0,6 |
|
|
|
0,6 |
|
|
|
|
0,2 |
|
|
|
0,2 |
|
|
|
|
0,4 |
0,6 |
0,8 |
1,0 |
0,4 |
0,6 |
0,8 |
1,0 |
η |
|
|
|
|
|
|
|
|
н |
|
|
а |
|
|
|
б |
|
|
|
|
|
|
Рис. 2.11 |
|
|
|
|
36
Все потери в ЭДУ делят на постоянные pд пост – потери в стали и механические потери, обусловленные, прежде всего, силами трения – и переменные потери pд пер – это электрические потери в меди, пропорциональные квадрату тока ( pд пер ≡ I2), величина которого зависит от загрузки двигателя. Поэтому точнее коэффициент загрузки определять как X = IX / Iн, так как не всегда имеется строго линейная зависимость между мощностью на валу двигателя и током. Поэтому можно записать
p |
= |
p |
+ p |
= p |
+ X 2 p |
д пер н |
, |
|
(2.13) |
|
дX |
д пост |
д перX |
д пост |
|
|
|
|
|
а для номинального режима |
|
|
|
|
|
|
|
||
|
|
pд н = |
pд пост + |
pд пер н = |
pд пер н (aп + 1) |
, |
(2.14) |
||
где ап = pд пост / |
pд пер н – коэффициент отношения постоянных потерь двига- |
||||||||
теля к его переменным номинальным потерям. Для двигателей общепромышленных серий (5А, 4П, 2П и др. – прил. 2) приближенно можно принять ап ≈ 1 ( pд пост = pд пер н). Для краново-металлургических серий ЭДУ переменного тока (MTF и MTH) ап = 0,5÷0,6 и постоянного тока (Д) ап = 0,5÷0,9.
Из формулы (2.14) следует, что
p |
д пер н |
= |
|
pд н |
и |
p |
|
|
= |
pд нaп |
. |
|
|
(2.15) |
|||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
aп + 1 |
|
д пост |
|
aп + 1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Подставляя выражения (2.15) в формулу (2.13), получим: |
|
|
|
||||||||||||||||
|
|
|
p |
a |
|
p |
д н |
|
|
|
a + X |
2 |
|
|
|||||
p |
= |
|
|
|
д н п |
+ X 2 |
|
|
= |
p |
д н |
п |
|
. |
(2.16) |
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
дX |
aп + 1 |
|
aп + 1 |
|
|
aп + 1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
Учитывая, что pд н = Pв н (1 − ηд н) / ηд н и |
pдX |
= PвX (1 − ηдX ) / ηдX , а |
также |
||||||||||||||||
формулы (2.12) и (2.16), окончательно найдем формулу определения КПД ЭДУ при частичной загрузке:
hдX = |
|
1 |
|
|
= |
|
|
|
1 |
|
|
|
. |
(2.17) |
|
|
Dpд |
X |
|
|
1 - h |
|
a + X 2 |
||||||||
1 + |
|
1 + |
|
|
д н |
|
× |
п |
|
|
|
||||
P |
|
|
h |
X |
a +1 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
вX |
|
|
|
|
|
д н |
|
|
|
п |
|
||
Иногда пренебрегают постоянными потерями, полагая ап = 0, что упрощает формулу (2.17). Однако это может повлечь к неправильной оценке потерь энергии при выборе мощности двигателя.

37
Итак, учитывая потери в стали и механичекие потери ЭДУ в уравнении движения (2.10) величина момента Mд равна:
M д = Pэлηд ,
ωд
где Pэл – электрическая мощность, подводимая к зажимам ЭДУ (мощность се-
ти Pс или выходная мощность ЭПУ Pэпу при его наличии в СЭП).
При передаче энергии по кинематическим цепям ПУ возникают потери, обусловленные силами трения в опорах валов, упругими силами, силами диссипации и др., поэтому приведенный статический момент Мс рассчитывается по формуле (2.3) с учетом потерь в ПУ:
M с = |
M ро |
, |
(2.18) |
|
n |
ηп i ) |
|||
|
∏( ji |
|
|
|
i=1
где ηп i – КПД i-го элемента ПУ.
Для СЭП с активным Мс выражением (2.18) следует пользоваться в двигательном режиме. В тормозном режиме потери будут покрываться со стороны вала РО, тогда
n
∏ηп i
M с = M ро i=1 . n
∏ ji
i=1
Проведенные многочисленные исследования показали, что потери зависят от коэффициента загрузки привода μ = Мс / Мс н. Поэтому потери в ПУ, аналогично потерям в ЭДУ, оказалось удобно разделить на постоянные, про-
порциональные номинальному статическому моменту |
Мпост = bпМс н, и пере- |
менные, пропорциональные передаваемому моменту |
Мпер = спМс, и получить |
зависимости отношений постоянных и полных номинальных потерь для различных видов передач:
d |
п |
= |
M пост = |
|
bп , |
|
|
|
M н |
bп + cп |
|
||
|
|
|
||||
где Мн = Мпост + Мпер н. Зависимость dп |
от ηп н для пары зубчатых колес |
|||||
приведена на рис. 2.11, б. |
|
|
|
|
|
|
38
Коэффициенты bп и сп можно найти по формулам [9]:
b = d |
|
1 − ηп н |
и с = b |
1 − dп |
. |
|
п η |
|
|||||
п |
п п d |
п |
||||
|
|
п н |
|
|
||
КПД передачи при частичной загрузке определяется по выражению:
ηп μ = |
|
|
M c |
|
= |
|
|
1 |
|
= |
ηп н |
|
. |
||
M c |
+ |
M пост + |
M пер |
|
|
bп |
|
|
1 − μ |
|
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1 |
+ |
μ |
|
+ сп |
1+bпηп н μ |
|
|
||||||
|
|
|
|
|
|
|
|||||||||
КПД зацепления зубчатых колес редукторов в зависимости от качества их обработки и смазки изменяется в пределах ηз = 0,9÷0,98. Такой же диапазон значений КПД у зубчато-реечных передач. КПД винтовых и червячных передач составляет ηч = 0,7÷0,9 и зависит от числа заходов нитки (резьбы) червяка. КПД передач с гибкой связью (ременные, канатные, цепные и др.) не превышает значений ηгс = 0,9÷0,95. КПД полужестких дисковых муфт ηмф = 0,8÷0,92. Однако полное значение любой передачи несколько ниже и определяется в совокупности с КПД подшипников, значения которого лежит в пределах ηпш = 0,9÷0,99. Таким образом, КПД передачи пары цилиндрических зубчатых колес составляет ηп = ηзηпш = 0,89÷0,95.
КПД двухступенчатой передачи редуктора еще ниже, т. к. учитывает КПД первой и второй пар зубчатых зацеплений. Все приведенные формулы являются приближенными, так как не учитывают изменений потерь в передачах в динамических режимах работы привода при изменении его скорости.
2.12. Переходные процессы при линейных характеристиках двигателя и механизма
Рассмотрим переходные (динамические) процессы в одномассовой системе электропривода с J = сonst, которую можно описать одним уравнением равновесия моментов – основным уравнением движения (2.10).
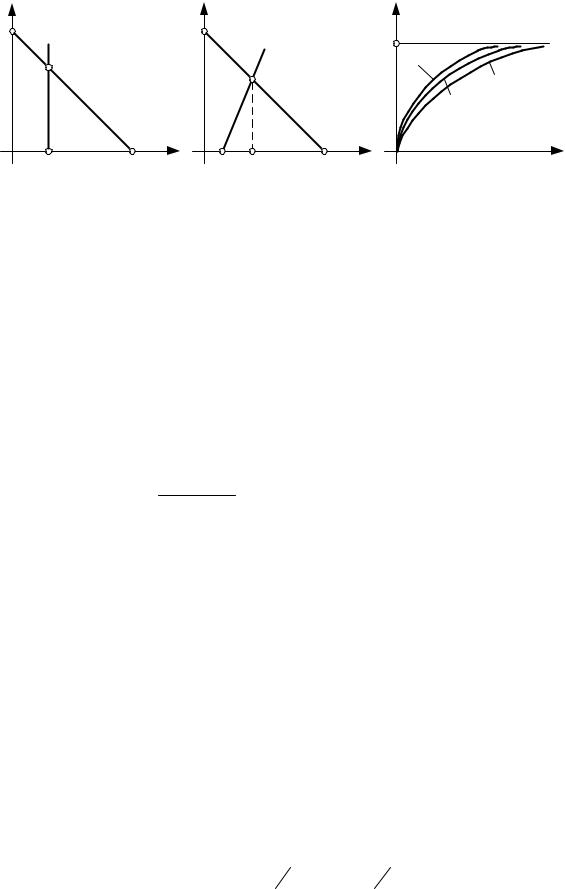
Полагая, что механическая характеристика двигателя линейна, можно записать (рис. 2.12, а):
M д = M кз − βω , |
(2.19) |
где β = | dM / dω | = Мкз / ω0 – модуль коэффициента жесткости; ω0 и Мкз – скорость идеального холостого хода (при Мс = 0) и момент короткого замыкания двигателя (при ω = 0).
|
|
|
|
39 |
|
|
|
|
ω |
|
|
ω |
|
|
ω |
|
|
ω0 |
|
|
ω0 |
|
|
ωc |
|
|
ωс |
|
|
|
|
≡ ω2 |
|
||
|
|
ω′с |
|
M c |
|
|||
|
|
|
|
|
Mc = const |
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
M c |
≡ ω |
|
|
|
|
|
|
|
|
t |
M |
c |
M кз |
M |
′ |
M кз |
M |
|
|
|
M c0 M c |
|
|
|||||
|
а |
|
|
б |
|
|
|
в |
|
|
|
|
Рис. 2.12 |
|
|
|
|
Подставив выражение (2.19) в (2.10) и разделив его на b, получим: |
||||||||
J |
× |
dω |
+ w = |
M кз − M с |
. |
(2.20) |
b |
dt |
|
||||
|
|
b |
|
|||
Введем новую переменную Тм = J / b = J w0 / Мкз – электромеханическую постоянную времени, в течение которой электропривод, обладающий моментом инерции J , разгоняется до скорости ω0 при постоянном моменте Мкз .
Тогда, на основании рис. 2.12, а можно записать [9]:
M кз − M с = (M кз − M с )ωс = wс , |
|
b |
M кз - M с |
где ωс – установившаяся скорость двигателя при действии нагрузки Мс = сonst.
Таким образом, уравнение движения (2.20) может быть представлено в ви-
де:
T |
dω |
+ w = w |
. |
(2.21) |
|
dt |
|||||
м |
с |
|
|
Характеристическим уравнением, соответствующим дифференциальному уравнению (2.21), является Тмp + 1 = 0, корень которого равен p = – 1 / Тм. При этом выражение для скорости в переходном режиме запишет-
ся как w = Ae−t / Tм + wс . Для начальных условий w = wнач при t = 0 постоянная
интегрирования равна А = wнач – wс, |
тогда решение уравнения (2.21) примет |
|||||
вид: |
|
|
|
|
|
|
|
|
− t |
|
+ wначe |
− t |
(2.22) |
w = wс 1 |
- e |
Tм |
Tм . |
|||
|
|
|
|
|
|
|

40
Чтобы получить выражение для момента двигателя в переходном режиме, подставим (2.22) в формулу (2.19) и примем, исходя из рис. 2.12, а,
βωс = ωс (M кз − M с )/ ωс |
= M кз − M с и bwнач = Мкз – |
Мнач: |
|
|
|||||||
|
|
|
|
|
|
− t |
|
− t |
|
(2.23) |
|
|
|
|
|
M д = M с 1 - e |
Tм + M |
начe Tм . |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
При статическом моменте Мс = Мс0 + bс w (рис. 2.12, б) уравнение движе- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
′ |
примет |
ния (2.10) с учетом выражения (2.19) и новой переменной β = β + βc |
|||||||||||
вид: |
|
|
|
|
|
|
|
|
|||
|
J |
× |
dω |
+ w = |
M кз − M с0 |
или T ¢ × |
dω |
+ w = w¢ . |
|
||
|
|
|
|
|
|
||||||
|
b¢ dt |
|
b¢ |
м |
dt |
с |
|
||||
|
|
|
|
|
|
||||||
Полученные выражения аналогичны (2.20) и (2.21). Следовательно, и вид уравнений скорости и момента аналогичен зависимостям (2.22) и (2.23). Отличие состоит в том, что установившиеся значения скорости и момента оп-
ределяются точкой пересечения механических |
характеристик двигателя и |
||
|
′ |
|
|
статического момента. Величину момента M с можно определить на основа- |
|||
нии рис. 2.12, б: |
|
|
|
′ |
′ |
′ |
. |
M с = β(ω0 |
− ωс ) = (βc M кз + βM с0 )/ β |
||
′ |
′ |
/ β) меньше постоянной Тм, |
|
Постоянная времени Tм |
= J / β = Tм /(1 + βс |
||
поэтому при линейно изменяющемся статическом моменте переходные процессы протекают быстрее. Как показывают исследования в случае вентиляторной нагрузки Мс º w2 (рис. 2.12, в) процессы протекают еще быстрее.
2.13. Время разгона и торможения электропривода
Процессы запуска рабочих органов машин и механизмов и их остановка являются неотъемлемыми элементами производственного цикла. Сокращая длительность участков пуска и торможения, можно сократить общую длительность цикла изготовления изделия и повысить производительность. Определить время пуска можно из основного уравнения движения электропривода (2.10):
|
dω |
ω2 |
dω |
|
|
dt = J |
t = J ∫ |
|
|||
|
|
. |
(2.24) |
||
M д − M с |
|
||||
|
ω |
M д − M с |
|
||
|
|
1 |
|
|
|