

ЭЛЕКТРИЧЕСКИЙ ПРИВОД Учебное пособие
.pdf
|
|
|
|
121 |
|
|
|
|
|
габаритов конденсаторов и разработке новых схем, обеспечивающих интен- |
|||||||||
сивное самовозбуждение АД. |
|
|
|
|
|
|
|
||
При отключении АД с вращающимся ротором от сети и подключении к |
|||||||||
статору батареи конденсаторов (рис. 4.17, а) ЭДС Eo , индуцируемая в обмот- |
|||||||||
ках статора вращающимся ротором за счет остаточного намагничивания, обу- |
|||||||||
славливает протекание по обмоткам статора тока Iμo |
– начинается заряд кон- |
||||||||
денсаторов (рис. 4.17, б). Этот ток создает в машине вращающееся магнитное |
|||||||||
поле, которое увеличивает ЭДС АД. Как следствие этого, происходит увели- |
|||||||||
чение напряжения на конденсаторах, что в свою очередь повышает его ток и |
|||||||||
т. д. Происходит процесс самовозбуждения АД как асинхронного генератора. |
|||||||||
Зависимость |
между |
напряжением |
и током |
конденсатора |
прямолинейна |
||||
UC = Iμ X C , а зависимость между током намагничивания и ЭДС АД опреде- |
|||||||||
ляется его кривой холостого хода. Поэтому, процесс самовозбуждения закон- |
|||||||||
чится при равенстве E1 и напряжения на конденсаторе U C . |
|
|
|||||||
Эквивалентная схема замещения такого режима имеет вид, показанный |
|||||||||
на рис. 4.17, в. Уравнение баланса ЭДС E1 |
в статорной цепи: |
|
|
||||||
|
E1 = Iμ X μϕ = I1 |
R12 + (X1ϕ − X C / ϕ)2 , |
|
|
|||||
где ϕ = f – относительная частота тока статора ( f = 50 Гц). |
|
|
|||||||
f1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E1 |
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
U1л ≈ |
|
|
|
|
|
|
|
E2 |
|
|
|
|
|
|
|
|
ψ2 |
|
|
Q |
C |
|
|
|
UC |
|
|
|
|
|
|
|
|
|
|
′ |
|
||
|
|
|
|
|
|
|
|
Iμ |
|
|
|
|
E0 |
|
|
|
|
I2 |
|
|
Y |
|
|
|
|
|
|
Ф |
|
|
|
Iμ0 |
|
|
|
ψ1 |
|||
M |
|
|
|
б |
|
|
|||
|
а |
|
X1 |
R1 |
|
′ |
|
|
|
|
|
|
X 2 |
|
E1 |
|
|||
|
|
|
I |
|
|
I ′ |
′ |
|
|
|
|
|
|
|
|
|
|||
|
|
C |
Iμ |
X μ |
R2 |
|
|
||
|
|
1 |
2 |
s |
|
|
|||
|
|
|
г |
|
|||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
в |
|
|
|
|
|
Рис. 4.17 |
|
|
|
|
||
|
|
|
|
|
|
|
′ |
(это возможно |
|
Полагая в начале самовозбуждения ток в роторе I 2 = 0 |
|||||||||
при низких скоростях, когда потери малы), тогда I1 = Iμ и |
|
|
|||||||

122
2 |
|
X |
C |
2 |
2 2 |
R1 |
|
|
|
= X μ ϕнач , |
|
|
|
||||
+ X1ϕнач − |
|
|
|
||
|
|
ϕнач |
|
||
где ϕнач – начальная частота самовозбуждения. Следовательно
( X μ |
2 − X12 )ϕнач4 |
+ (2 X1 X C − R12 )ϕнач2 − X C2 = 0 . |
(4.44) |
|||||||||||||||||||||
Ввиду малости X |
1 |
и 2 X |
|
X |
C |
− R2 по сравнению с X |
μ |
выражение (4.44) |
||||||||||||||||
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||
можно упростить: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
X 2ϕ4 |
≈ X |
|
2 |
ϕ |
нач |
≈ |
XC |
|
или ω |
нач |
≈ |
1 |
|
|
= ω . |
|
||||||||
C |
|
|
|
|
||||||||||||||||||||
μ нач |
|
|
|
|
|
|
|
Xμ |
|
|
CLμ |
|
|
|
C |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
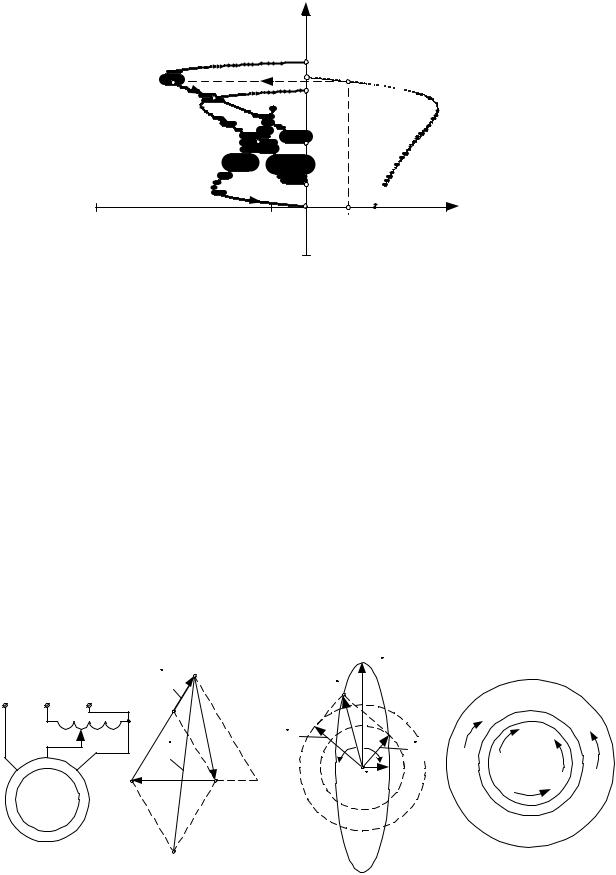
Таким образом, начальная частота процесса самовозбуждения АД примерно равна собственной частоте колебательного контура ненасыщенной машины. При работе самовозбужденного «генератора» вращающееся поле, созданное током статора, будет индуцировать в его обмотке ЭДС E1 , от-
стающую от магнитного потока на 900. Этот же магнитный поток в обмотке ротора, вращающегося со скоростью, большей скорости вращения магнитно-
го поля, будет индуцировать ЭДС E′ , опережающую поток на 900. Ток стато-
2
ра I1 благодаря преобладанию емкости опережает E1 на угол ψ1 , а ток ротора
I |
′ |
из-за наличия индуктивного сопротивления отстает от |
′ |
на угол ψ2 |
2 |
E2 |
(рис. 4.17, г).
При повышении скорости вращения ротора частота будет расти, что вызовет увеличение индуктивных сопротивлений цепей АД. Вектор I1 вследст-
вие увеличения реактивного сопротивления X1ϕ и уменьшения X C / ϕ будет поворачиваться по часовой стрелке ( ψ1 ↓ ) из положения, совпадающего с Iμ .
Вектор же |
I |
′ |
вследствие увеличения |
X |
′ |
ϕ с возрастанием частоты также по- |
2 |
2 |
ворачивается по направлению часовой стрелки ( ψ2 − ). В результате этого, сначала величина тока Iμ растет, достигая некоторого максимума, а при дальнейшем возрастании скорости до значения ωкон наступает равенство реактивных
составляющих токов I1 и |
I |
′ |
, поэтому процесс самовозбуждения заканчивается |
2 |
( Iμ = 0 ). Пренебрегая активным сопротивлением можно записать:

|
|
|
|
|
123 |
|
|
|
|
|
|
|||
|
|
|
|
|
X С |
|
|
′ |
|
′ |
|
|||
|
|
I1 |
X |
1ϕкон − |
|
|
|
+ I |
|
, |
||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
2 X |
2ϕкон = 0 |
||||||||
|
|
|
|
|
ϕкон |
|
|
|
|
|
|
|||
откуда, при I1 = I |
′ |
, следует, что |
|
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕкон = |
|
X С |
|
|
. |
|
||||
|
|
|
|
X1 + X |
′ |
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
||||
Углы между токами и ЭДС в конце самовозбуждения также равны ψ1 = ψ 2 , поэтому
|
|
X1ϕкон − |
X C |
||||||
|
|
|
|
|
|
′ |
|||
tgψ = tgψ |
ϕкон |
= |
X 2ϕкон |
, |
|||||
|
|
|
|||||||
1 |
2 |
|
|
|
|
|
′ |
||
R |
|
|
|
|
R2 |
||||
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
|
|
sкон
откуда скольжение sкон , которое имеет АД при потере самовозбуждения:
= − R′
sкон 2 .
R1
Скорость ротора при потере самовозбуждения определяется как
ωкон = ω0ϕкон (1 − sкон ) .
Механические характеристики АД при работе в режиме динамического торможения с самовозбуждением для различных значений емкости приведены на рис. 4.18, где C1 > C2 .
К недостаткам рассмотренного вида торможения АД следует отнести возможность его эффективного использования только при достаточно боль-
ших скоростях ω > |
1 |
÷ |
1 |
ω0 . Для торможения машины при пониженной |
|
|
|||
|
3 |
2 |
|
|
скорости вращения необходимо включать конденсаторы большой емкости (точка б на рис. 4.18) или переходить к другим видам торможения (на рис. 15 в точке в показано переключение на динамическое торможение АД при его подключении к сети постоянного тока).
|
|
|
124 |
|
|
|
ω |
|
|
|
ωн2 |
а |
|
ωн1 |
|
С2 |
б |
|
|
< |
|
|
|
|
С1 |
в |
ωк2 |
|
|
|
|
|
M дт |
|
ωк1 |



 ωc
ωc





 M е
M е
M с




 M
M
Рис. 4.18
Преимуществом конденсаторного торможения является отсутствие необходимости в источнике напряжения, т. е. может применяться в аварийных ситуациях.
4.7. Механические характеристики АД при несимметричных режимах.
Несимметричные режимы работы АД возникают при несимметрии напряжений питания или несимметрии параметров фаз статора или ротора машины [1]. Поэтому необходимо знать, к каким искажениям механических характеристик двигателя приведут эти явления.
Несимметрию первичного напряжения можно создать с помощью ав-
тотрансформатора. Схема включения АД с автотрансформатором и векторная диаграмма подводимых к статору линейных напряжений изображены на рис. 4.19, а и б.
|
|
А |
|
Вmax |
|
|
|
|
|
3Uобр |
|
В |
|
|
|
А В |
С |
А1 |
|
ω1обр |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
А В1 |
|
3Uпр |
Впр |
Вобр |
ω2обр |
|
|
С |
|
ω2пр |
ω |
||||
|
С |
В |
|
Вmin |
ω |
||
|
|
|
1пр |
||||
М |
|
В1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А2 |
|
|
|
|
|
а |
|
б |
|
в |
|
г |
|
Рис. 4.19

125
Вращающееся несимметричное поле статора становится эллиптическим
– вектор магнитной индукции Вɺ своим концом в пространстве описывает эллипс (рис. 4.19, в) из-за непостоянства своей длины.
Вектор Вɺ эллиптического поля в любом его пространственном положении можно представить в виде суммы векторов магнитных индукций прямого
Вɺпр и обратного Вɺобр симметричных круговых магнитных полей, вращающихся в противоположные стороны: Вɺ = Вɺпр + Вɺобр . Тогда несимметричная
система линейных напряжений разлагается на две симметричные трехфазные системы – прямую U пр и обратную U обр , создавая свои магнитные потоки,
ЭДС и токи ротора.
Взаимодействие потока и тока ротора прямого направления вращения создает электромагнитный момент M пр , обратного направления – M обр . При
взаимодействии потока прямого и токов обратного направления вращения возникает пульсирующий момент M п , компенсируемый противофазным
пульсирующим моментом M п , созданным при взаимодействии потока обрат-
ного и токов прямого направления вращения. Поэтому момент двигателя равен сумме M пр и M обр .
M ∑ = M пр + |
Мобр = |
m I |
2 |
|
R |
+ |
m I |
2 |
R |
|||||||
1 |
2пр |
|
2 |
1 |
2обр |
2 |
. |
|||||||||
ω0sпр |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
ω0sобр |
|||||||||
Ротор имеет скольжение по отношению к полю прямого следования фаз |
||||||||||||||||
|
sпр = |
ω1пр |
|
p − ω |
= |
|
ω0 − ω |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
||
|
ω1пр |
p |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
ω0 |
|
|
|
||||||
а по отношению к полю обратного направления вращения (рис. 4.19, г) |
||||||||||||||||
sобр = |
ω1обр p + ω |
= |
ω0 + ω |
sобр = 2 − sпр . |
||||||||||||
ω1обр |
p |
|
|
ω0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Для расчета механических |
характеристик |
вычислим векторы Uɺпр и |
||||||||||||||
Uɺобр графическим методом. Восстановим на отрезке СВ1 (рис. 4.19, б) два
равносторонних треугольника СВ1А1 и СВ1А2. Отрезок АА1 в соответствующем масштабе изображает 3Uɺобр , а отрезок АА2 – 3Uɺпр , где U обр и U пр – модули симметричных систем фазных напряжений.

126
В математической форме можно записать:
|
|
U B C = kатU BC ; |
kат = |
0,1; |
|
|
|
|
|
||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3Uɺ |
обр |
= Uɺ |
СА |
− k Uɺ |
СА |
= Uɺ |
(1 − k |
ат |
) ; |
||||||||
|
|
|
|
ат |
|
1л |
|
|
|
|
|
|
|
||||
|
= Uɺ |
− k Uɺ |
= Uɺ |
|
− k |
|
|
− j |
4π |
|
|||||||
3Uɺ |
|
e |
|
||||||||||||||
1 |
ат |
|
|
3 . |
|||||||||||||
пр |
|
СА |
|
|
ат |
АВ |
|
|
1л |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Откуда
U обр = 1U1л (1 − kат );
3
U пр = |
1 |
|
1 − 2kат cos |
4π |
+ kат2 |
= |
1 |
U1л |
|
. |
|
U1л |
1 + kат + kат2 |
||||||||||
|
|
|
|||||||||
3 |
3 |
|
3 |
|
|
||||||
По найденным симметричным составляющим фазных напряжений могут быть определены значения соответствующих им критических моментов:
|
|
|
|
U |
пр |
|
2 |
|
|
U |
обр |
2 |
|
|
М |
|
= М |
|
|
|
и М |
|
= М |
|
|
|
, |
||
к.пр |
|
|
к.обр |
|
|
|||||||||
|
|
к |
|
|
|
|
|
к |
|
|
|
|||
|
|
|
U ф.н |
|
|
|
U ф.н |
|
||||||
где Мк – критический момент двигателя при нормальной (симметричной) схеме питания, U ф.н – номинальное фазное напряжение.
Тогда формула для механической характеристики примет вид:
М = |
2Мк. пр (1 + ε) |
− |
|
2Мк.обр (1 + ε) |
(4.45) |
||||||||
|
s |
+ |
sк |
+ 2ε |
|
|
2 − s |
+ |
sк |
+ 2ε |
|||
|
|
sк |
|
s |
|
|
sк |
2 − s |
|
||||
Знак «–» между дробями в выражении (4.45) указывает на то, что момент обратного направления вращения противодействует Мпр , т. е. является
тормозным.
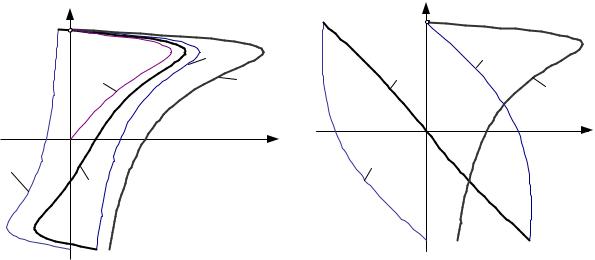
Механические характеристики (рис. 4.20, а) АДК, рассчитанные по (4.45), не пригодны для практического использования. Для АДФ при введении R2 доб их можно видоизменить (рис. 4.20, б) и использовать для тормоз-
|
|
127 |
|
|
|
ных режимов в подъемно-транспортных установках для устранения недостат- |
|||||
ка торможения противовключением, в котором возможен самопроизвольный |
|||||
реверс. |
|
|
|
|
|
|
ω |
|
|
ω |
|
|
|
|
ω0 |
|
|
|
ω0 |
|
|
|
|
|
M пр |
|
|
M пр |
|
|
kат = 0 |
|
M ∑ |
||
|
M е |
|
M е |
||
|
|
|
|
||
|
|
(kат = 1) |
|
|
|
M обр |
|
M |
M обр |
M |
|
|
|
||||
|
|
|
|||
|
M ∑ |
|
|
|
|
|
а |
|
|
б |
|
|
|
Рис. 4.20 |
|
|
|
Недостаток несимметричного питания статора – наличие обратного по- |
|||||
ля, что приводит к значительно большим потерям (нагреву обмоток) в маши- |
|||||
не, по сравнению с симметричным режимом работы АД. Применяется в ком- |
|||||
бинации с торможением противовключением. |
|
|
|||
При kат = 0 – двухфазный режим работы АД. |
|
||||
Несимметричное включение сопротивления в цепь ротора применя- |
|||||
ется для увеличения числа пусковых характеристик, не увеличивая число |
|||||
ступеней сопротивления. |
|
|
|
|
|
Несимметричную систему токов ротора делят на симметричные состав- |
|||||
ляющие прямой и обратной последовательности, аналогичных при рассмот- |
|||||
рении несимметрии статорной цепи АД. |
|
|
|
||
Токи прямой последовательности с частотой f1s (рис. 4.19, г) создают |
|||||
магнито-движущую силу (МДС), вращающуюся относительно ротора со ско- |
|||||
ростью |
ω2пр = ω0 s , а |
относительно |
статора |
ω1пр = ω + ω2пр = ω0 (1 − s) + |
|
+ ω0 s = ω0 , т. е. неподвижно относительно МДС статора. |
|
||||
Токи ротора обратной последовательности, имеющие ту же частоту f1s , |
|||||
создадут МДС, вращающуюся относительно вращения ротора в противопо- |
|||||
ложную сторону со скоростью ω2обр = ω0 s , а относительно статора со скоро- |
|||||
стью |
|
|
|
|
|
|
ω1обр = ω − ω2обр = ω0 (1 − s) − ω0 s = ω0 (1 − 2s). |
(4.46) |
|||
128
Анализируя формулу (4.46) видно, что при скольжении 0,5 < s < 1 МДС, созданная токами ротора обратной последовательности вращается в отрицательном направлении относительно поля статора ( ω1обр < 0 ), а при 0 < s < 0,5
эта же МДС вращается в положительном направлении ( ω1обр > 0 ).
Обратная МДС ротора и МДС статора образуют результирующий поток, который, взаимодействуя с током статора, дает дополнительный обратный момент M обр , изменяющий свой знак в зависимости от скольжения. Оп-
ределение знака M обр возможно, если представить, что токи ротора обратной
последовательности создаются за счет питания ротора со стороны от фиктивного источника энергии с частотой f1s . Под действием вращающегося маг-
нитного поля ротора статор должен вращаться в том же направлении. Однако статор в действительности неподвижен, следовательно, момент, развиваемый статором, будет уравновешен усилиями деформации опоры крепления статора, а на ротор будет действовать равный по величине и противоположный по знаку момент реакции между статором и ротором. Поэтому, ротор АД будет вращаться в сторону, противоположную вращению его поля. Таким образом, в зоне скоростей ротора ω < 0,5ω0 при ω1обр < 0 на ротор будет действовать
дополнительный положительный момент M обр > 0 . При скорости ротора ω = 0,5ω0 обратное магнитное поле ротора будет неподвижно ω1обр = 0 , следовательно M обр = 0 . Если частота ротора выше половины синхронной скорости M обр < 0 , т. е. дополнительный момент является тормозным.
ω |
|
|
ω0 |
|
|
Mобр |
M ∑ |
Mи |
|
|
|
ω0 |
|
|
2 |
M пр |
Rэ2 |
|
|
Rэ1 |
|
|
M |
|
Рис. 4.21 |
|
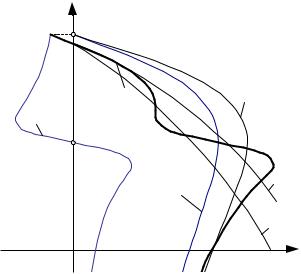
Общий момент АД представляет собой алгебраическую сумму прямого и обратного моментов, т. е. М = Мпр + Мобр (рис. 4.21). Результирующая ме-

129
ханическая характеристика при скольжении, близком к s = 0,5 , имеет «провал», который увеличивается с большей несимметрией сопротивлений в роторе. Кроме того, провал момента при большом Мс может вызвать прекра-
щение разгона двигателя у половины синхронной скорости.
Существует также взаимодействие между токами и магнитными потоками обратных и прямых последовательностей, вызывающее дополнительные пульсирующие моменты, среднее значение которых, как и при несимметрии в статоре АД, равно нулю. Однако чрезмерно большие пульсации момента ограничивают допустимую несимметрию сопротивлений.
Точный расчет механических характеристик АД с несимметричными сопротивлениями цепей ротора очень сложен, если учесть, что здесь играет большую роль насыщение, сглаживающее провалы моментов. Учитывая, что допустимая несимметрия цепей ротора получается небольшой и провалы момента незначительные, несимметричные сопротивления заменяют на эквивалентные симметричные, определяемые по формуле [3]:
Rэ1 = R2a + R2b + R2c .
3
Однако при большой несимметрии роторной цепи АД эквивалентное сопротивление рассчитывается, исходя из равенства электрических потерь в цепи ротора (особенно это сказывается при скорости ротора выше 0,5ω0 ):
R |
= |
R2a R2b + R2b R2c + R2a R2c |
. |
|
|||
э2 |
|
R2a + R2b + R2c |
|
|
|
||
Для расчета сопротивлений секций пускового реостата при его несимметричном включении задаются кратностью пускового и переключающего моментов λп = M1  M 2 и значением пускового момента M1 . Для последнего
M 2 и значением пускового момента M1 . Для последнего
определяют необходимое симметричное сопротивление пускового реостата и принимают его равным Rэ2 . Большее несимметричное сопротивление выби-
рают равным Rэ2λп , а меньшее – Rэ2 / λп [3]. На следующей ступени пуска
эквивалентное сопротивление предшествующей ступени принимают за наибольшее несимметричное, и т. д.
Достоинство несимметричного включения сопротивлений в цепь ротора АД – большее число ступеней ускорения при пуске.
Недостатки заключаются в трудности регулирования скорости АД при ω > ω0 / 2 , так как несимметрией нельзя создать тормозной момент для замед-
ления двигателя, а также большие потери и нагрев из-за дополнительных обратных токов и потоков.
130
4.8. Механическая и угловая характеристики синхронных двигателей
Синхронные двигатели (СД) широко применяются в ЭП самых разнообразных рабочих машин и механизмов благодаря наличию таких преимуществ, как:
1)высокий коэффициент мощности cos ϕ , равный 1 для ЭП малой мощности и опережающий cos ϕ в установках большой мощности;
2)высокий КПД h = 0,96 ¸ 0,98 ( ηСД = (1,01÷1,015)ηАД );
3)возможность регулирования перегрузочной способности и меньшая его зависимость от напряжения сети, по сравнению с АД;
4)абсолютно жесткая механическая характеристика;
5)больший воздушный зазор между статором (якорем) и ротором (индуктором), что повышает надежность СД и увеличивает мощность до нескольких десятков мегаватт.
На рис. 4.22, а приведена схема включения СД. На статоре СД, аналогично АД, располагается трехфазная обмотка, подключенная к сети переменного тока. Ротор СД выполняется с двумя обмотками: обмоткой возбуждения, питающейся от сети постоянного тока, и пусковой обмоткой, выполненной в виде «беличьей клетки». Ротор СМ может быть двух типов – явнополюсный (рис. 4.22) с явно выраженными полюсами (полюсными наконечниками) и неявнополюсный, обмотка возбуждения которого распределена по окружности ротора.
Как правило, явнополюсный ротор используется в тихоходных СД с числом пар полюсов p ³ 2 . Ротор СМ, работающий с большой скоростью
вращения ( n = 1500 ¸ 3000 об/мин), выполняют неявнополюсным с одной или двумя парами полюсов. Обмотка статора возбуждает вращающееся магнитное поле, которое захватывает в синхронном вращении поле ротора и сам ротор.
На рис. 4.22, б приведена векторная диаграмма работы СД в режиме хо-
лостого хода (рис. 4.22, д). Вектор напряжения сети Uɺс |
|
вращается с угловой |
|||||||||||
скоростью ω |
0 |
. |
Вектор Eɺ |
, индуктируемый в обмотке статора постоянным |
|||||||||
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
магнитным полем, вращается также с ω0 |
и направлен навстречу Uɺс . Ток ста- |
||||||||||||
тора при Uс = Eв в таком режиме равен нулю. При неравенстве Eв и Uс |
в ста- |
||||||||||||
торе течет |
|
ток холостого хода I = I |
= U / X |
с |
, |
где |
Uɺ = Uɺ |
с |
+ Eɺ |
, |
|||
X с = X я + X р |
|
|
|
1 |
1x |
|
|
|
|
в |
|
||
– |
индуктивное сопротивление статора, включающее сопротив- |
||||||||||||
ление реакции якоря и сопротивление рассеяния (активным сопротивлением из-за малости пренебрегают X с >> Rc ≈ 0 ).
Если к валу ротора СД приложить тормозной момент M с (рис. 4.22, е),
то ось полюсов d будет отставать от оси магнитного поля переменного тока на угол θ (угол нагрузки, угол рассогласования). Соответствующие векторы
напряжения и ЭДС на диаграмме также сместятся – вектор −Eɺв будет отста-