

ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ В РОБОТОТЕХНИКЕ
.pdfкотором сначала строятся гипотезы о распознанных фонемах, из которыхмогутбытьсоставленыслова, азатемгипотезыслов. Рас- познавание фонем и слов наиболее часто производится методом скрытых марковских моделей (Hidden Markov Model – HMM), который основан на теории дискретных случайных цепей [21].
Разработка систем распознавания речи требует большого объема акустических данных, на основе которых создаются сто- хастические базы данных (акустические корпуса). Корпуса стро- ятся с учетом характеристик дикторов, канала передачи, уровня шума. В таких базах данных содержатся транскрипции, разметка сигналов по фонемам, слогам, словам и фразам. Использование статистическогоподходанаосновеНММзначительнопродвинуло распознавание речи в отношении ее сложности, зависимости от диктора и объема словаря.
Слитнаяречьявляетсянаиболеетруднораспознаваемой. Здесь границы слов часто возможно определить лишь непосредственно
впроцессе распознавания посредством подбора оптимальной последовательности слов по акустическим, лингвистическим ипрагматическимкритериям. Прибольшихсловаряхиспользуется многоуровневаяобработка, высокоуровневыепроцедурыизнания
впроблемной области. Здесь обязателен анализ смыслового кон- текста и использование стохастических моделей языка.
Статистический подход к распознаванию речи с использова- ниемНММможетбытьотнесенкполностьювербальномураспоз- наванию аудио образов. Пока не существует надежных вариантов образного распознавания речевой информации, поскольку аудио образыслишкомразнообразныисложны. Однакоимеютсяпопыт- кисозданиягибридныхсистемраспознавания, например, наоснове симбиозанейронныхсетейиНММ. Вэтихсистемахнейроннаясеть используется для оценивания вероятностей переходов состояний
всхеме НММ. Нейронная сеть аппроксимирует плотности рас- пределениявероятностейпутемнастройкивесовсвязейнейронов по критерию максимального правдоподобия.
Существуют также гибридные системы распознавания, где нейронная сеть используется на конечном этапе классификации
151
слов по набору признаков, который получается в процессе пред- варительной обработки речевого сигнала методами линейного предсказания или спектральными методом.
4.6. Искусственные креативные системы
Какотмеченовпервойглаве, креативность, т.е. творческаяна- правленностьмышления, вразнойстепениврожденносвойственна всем людям, но теряется большинством под воздействием среды. Дляробототехникиискусственныекреативныеспособности– не- обходимоеусловиесозданияразумныхроботов. Способностиэти, например, необходимы для выявления зависимостей в поступаю- щейинформациииформированиягипотезнаихоснове, создания новых моделей поведения на основе предсказания, генерации новых знаний на основе самообучения и т.п. Для их создания по- требуется развить принципиально новые подходы и специальные нейроморфныесредствадляобработкиинформациипреждевсего в образном представлении. Рассмотрим современное состояние техническойреализацииэтихспособностейпокавосновномспо- мощью традиционных вербальных средств.
Автоматическое построение гипотез. Общий подход к автома-
тическому построению гипотез основан на индуктивном подходе. Индуктивный логический вывод, обобщая частные исходные примеры, позволяет принимать общие решения. Существует раз- витаятеорияиндуктивноговывода, представляющаяпрактический интерес в плане решения задач по принятию решений на основа- нии обобщений. Недостатком индуктивного вывода в плане его реализации является плохая автоматизируемость, поскольку при решении подобных задач человеком решающее значение имеет интуиция. Применяемыевнастоящеевремяавтоматическиепро- цедурыиндуктивноговыводалибосильноограничены, либопред- назначены для узко очерченных задач [22].
Генерация моделей по данным. Автоматическоепостроениемо- делейпонаборамполучаемыхданныхоснованонавероятностных методах, нечетких множествах и нейронных сетях. Рассмотрим
152
функцииобработкиданных, которыеиспользуютсяпригенерации моделей по наборам получаемых данных.
Ассоциация. Эта функция выделения ассоциативных связей данных за счет обобщения связей между данными. Она использу- ется для структурирования данных и получения информации из данных в форме правил, связывающих данные.
Моделирование. Функция регрессии(получение усредненной аппроксимированной функции зависимых данных) для данных, имеющих разбросы, обычно реализуется через усреднение по ми- нимуму СКО. Такое моделирование используется для выделения скрытых функциональных зависимостей.
Классификация. Функция отнесения данных к некоторым классам. Используется при распознавании объектов, событий.
Используются и различные другие функции, выявляющие скрытыезакономерности, временныепоследовательностиданных. Интересные результаты по генерации зависимостей и прогнози- рованию могут дать нейронные сети. Однако их очевидный недо- статок– отсутствиеявногоалгоритмадействия. Другойвариант– анализданныхнаосновеиндуктивноговыводаирассужденийтак же относится к вербальной реализации [23].
Самообучениеновымрешениям. Развитиепреждевсегоэксперт- ных систем привело к разработке средств автоматического полу- чения знаний в логических формах. Прототипами таких самообу- чающихсяинформационныхсистем, содержащихпродукционные, семантические и фреймовые базы знаний и средства логического вывода и обучения, являются:
–иерархические продукционные системы с автоматическим формированием правил в импликативной форме;
–иерархические семантические сети с автоматическим фор- мированием понятий и отношений;
–фреймовые системы с обучением.
Методы обучения в таких системах – это метаправила, пара- метрическое обучение, генетические и эволюционные алгоритмы и т.п. Примеры таких систем были рассмотрены в параграфе 2.6.
153
По существу, они имитируют креативные функции человека по генерированию неизвестных понятий и правил.
Генетические и эволюционные алгоритмы. Они получили рас-
пространение как наиболее эффективные поисковые методы ре- шения оптимизационных задач. Эволюционная теория развития биологическихсистемначалаширокоиспользоватьсядлясинтезаи обучениятехническихсистемв1980-егоды, когдаДж. Холландом, азатемС. Голдбергомбылразработанаппаратэволюционногопо- иска, названный генетическим алгоритмом. В нем используются формализованные процедуры генерации популяций, селекции, кроссовера, мутации, построенные по аналогии с соответствую- щими биологическими процессами эволюции хромосом, генов и генома.
Примером применения этого подхода является задача соз- дания системы, осуществляющей генерацию моделей явлений на основе обработки данных о них. Основной задачей при этом является нахождение аналитических законов, которые лежат
воснове физических явлений в природе. Несмотря на рост мощ- ностикомпьютерныхсредств, процесснахождениятакихзаконов
исоответствующих им математических описаний плохо поддает- ся автоматизации. Предложен ряд основанных на генетических алгоритмах методов подобного моделирования научных данных, которыедолжныотыскиватьаналитическоевыражение, связыва- ющиевходныеивыходныепеременные, чтопозволитавтоматиче- ски перерабатывать данные в научные знания. Один из подходов
вэтом направлении, например, основан на методе символьной регрессии[24].
4.7.Перспективы создания разумных роботов
Впараграфе 4.1 была представлена гипотетическая функцио- нальная схема разумного робота будущего, обладающего полно- ценным искусственным разумом, включающим искусственный интеллект и искусственную креативность. Его информационное обеспечение по образу и подобию новой коры мозга человека
154
представляет собой двуединую последовательно-параллельную образно-вербальнуюсамообучающуюсянейроподобнуюструктуру.
Поматериаламнастоящейглавыструктурутакойсистемымож- нопредставитькакединуюнейроннуюсеть, вкоторойреализованы
ввидеинформационныхагентоввсефункциональныекомпоненты системы управления робота: параллельная однотипная обработка сенсорной информации от технического зрения до тактильных сенсоров, параллельныеобразныеивербальныеканалыпоследую- щегораспознаванияобразовиформированиякомплексноймодели внешнейсреды, оценкаситуацийипринятиерешенийодействиях
всоответствии с заданными целями и очередными конкретными задачами, планирование этих действий и их реализация путем управления движениями. Основой всех этих операций является многоуровневая ассоциативная память, реализованная в той же нейронной сети. Вся ее структура должна контролироваться еди- нымдиспетчером, которыйосуществляеттехническуюдиагностику системы и корректировку структуры в соответствии с загрузкой
итехническим состоянием отдельных агентов – функциональных компонентов. Для последнего эта нейронная сеть должна иметь определенный резерв.
Внастоящеевремя, какбылопоказано, можносчитать, чтодо- статочноотработаныалгоритмыпредобработкисенсорнойинфор- мации и их реализация локальныминейронными сетями до этапа распознавания образов, последующий вербальный канал и далее вплотьдоуправлениядвижениями. Предстоитреализоватьструк- туруассоциативнойпамятииалгоритмысамосовершенствования. Наиболеепроблемнымостаетсятакжеканалобработкиобразной информации, включая распознавание образов.
Ассоциативность и самосовершенствование – это два осно- вополагающих качества естественного, а соответственно и ис- кусственногоразума. Последнеесвойствовоспроизводитпроцесс эволюционного развития живой природы и, как было отмечено
впараграфе4.1, созданныйвбудущемврезультатетакогопроцесса искусственный разум, конечно, не будет воспроизводить полно- ценный разум человека, а только его часть, связанную с одним из
155
конкретных видов его профессиональной деятельности, т.е. это будет профессионально ориентированный искусственный разум. Соответственно и творческие способности будут реализованы только применительно к такому назначению робота с имитацией необходимойприэтомэмоциональноймотивации, какнеобходи- мой основы всякого творческого процесса.
Важно заметить, что такой разумный робот будет, очевидно, свободен от проблемы «человеческого фактора». Это важное, а во многих случаях и определяющее дополнительное основание для замены человека таким роботом.
Нарис. 4.7 приведенасхемасистемыуправленияроботомкон- кретизирующаяпредставленнуюнарис. 4.1 гипотетическуюсистему искусственногоразуманаосноверезультатоврассмотренныхвэтой главеисследованийиразработок, касающихсяпроблемыразвития искусственного интеллекта, когнитивных и креативных систем.
Эти исследования и разработки позволяют реализовать на ос- нове локальных иерархических нейронных сетей сенсомоторное управление движением типа рефлекторного, обработку образной сенсорнойинформацииспостроениемсоответствующихмоделей внешней среды и собственно робота, принятие решений об адек- ватном поведении и их реализацию путем управления приводами исполнительных систем робота. Реализуется это на интеллекту- альном и креативном уровнях. Что касается высших креативных функций, то пока они могут быть реализованы только вербально (построение гипотез, генерация моделей ситуаций, генетические
иэволюционныеалгоритмы), аосновныекреативныеспособности человека, определяемыеправополушарнымобразныммышлением, остаютсяпоканедоступнымимоделированиюитехническомувос- произведению. По-видимому, какпредполагалосьранее, основным путем для последнего будут экспериментальные исследования
иреализация эволюционного самоусовершенствования на базе описанной здесь системы управления. В конечном счете, именно эффективностьвоспроизведенияэтогосвойствавсехживыхорга- низмов и будет определять достигнутый уровень искусственного разума робота.
156
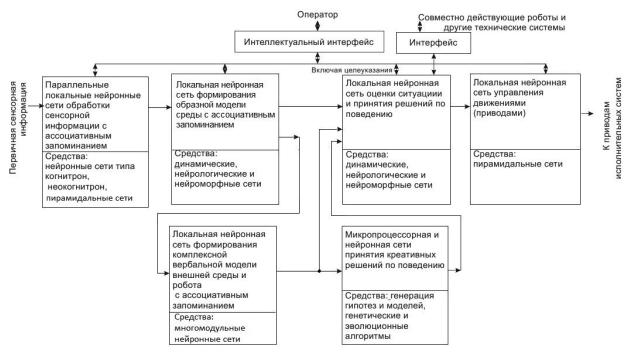
Рис. 4.7. Схема управления разумного робота
157
Проблема технической реализации процесса эволюционного самосовершенствования интенсивно изучается, в том числе и в тео- ретической робототехнике. Появились понятия «эволюционная ро- бототехника», «искусственнаяэволюция» [25]. Приэтоместественно максимальноиспользуютсязнанияобэволюционныхзакономерно- стяхвживойприродеипреждевсеговкореголовногомозгачеловека
иоролиприэтомгенетическойинформации. Всоответствиисэтими исследованиямипроцессэволюционногосовершенствованияроботов можетпредставлятьсяввидепоследовательностиследующихэтапов.
1.Определениецелей(назначения) роботавконкретныхусло- вияхсреды, необходимыхдляэтогоповеденческихфункций, путем разложенияцелейнаподцелисопределениемсоответствующихдля ихреализациифункцийиформированиянеобходимойпервичной структуры. Всеэтодолжноосуществлятьсянаоснове«генетической информации», т.е. разработчиком робота.
2.Самообучениедляокончательногоформированияструктуры системы управления робота и выполняемых функций. Это осу- ществляется с помощью отработки примеров поведения. Набор таких примеров правильного поведения («вход-выход») так же за- дается «генетически», т.е. разработчиком в соответствии с целями
ифункциями. Врезультатепоследовательносинтезируетсясистема управления робота.
3.Самоусовершенствование(«самомодификация»). Этоужеса- мостоятельныйпроцесс(без«учителя») дальнейшегоэволюционно- горазвитияробота, втомчислесформированиемновыхцелейпри измененииусловийсредыит.п. вконечномитогекорректировкой структуры. Инициируетсяоднакоэтотпроцесстоже«генетически», т.е. разработчиком, в виде соответствующей потребности, цели.
4.Все полученные результаты (цели, функции, структура, примеры для обучения) запоминаются в качестве «генетической информации» для синтеза следующих роботов этого поколения.
Вкачествесредстврешенияперечисленныхзадачэтаповреко- мендуютсянейронныесети, нечетко-логическиелингвистические структуры. Разрабатываются и другие средства – искусственные иммунные системы, поведенческие сети [13].
158
Длясинтезаалгоритмовиструктурыиспользуетсякомпьютер- ноемоделированиеэволюционныхпроцессовразвитияпопуляций роботов на основе генетических алгоритмов (обучение, мутации, отбор лучших). При этом обучение является средством эволюции
врамках единого поколения, а эволюция в целом обеспечивает развитиеспособностей, втомчислеикобучению, впоследователь- ности поколений.
При формировании общей нейронной сети из показанных на рис.4.7 функциональных локальных сетей могут оказаться полез- ными идеи и методы построения многоагентных сетей. При этом
вкачествеагентовврамкахблокаоценкиситуацииипринятияре- шениймогутбытьреализованыфункциятехническойдиагностики иобеспечениянадежностивсейсистемыуправленияиважнейшая функция эволюционного самоусовершенствования.
Необходимо подчеркнуть, что как показано в этой главе, при- веденные на рис. 4.7 локальные нейронные сети, образующие
всовокупности единую сеть системы, требуют для своей реализа- ции новых типов искусственных нейронов, отличающихся суще- ственно большей близостью к естественным нейронам, включая,
вчастности, наличие своей ассоциативной памяти и способность
ксобственному самосовершенствованию.
Можно так определить последовательность реализации рас- смотренной системы искусственного разума робота:
–созданиенейроннойструктурыобработкиобразнойсенсор- ной информации с ассоциативным распознаванием образов на новой элементной базе;
–реализация на такой же нейронной сети канала обработки вербальнойинформацииспостроениеммоделисредыипринятия решений;
–объединение этих двух нейронных структур обработки об- разной и вербальной информации в совместно функционирую- щую единую многофункциональную информационную систему искусственного разума;
–разработка и реализация в этой системе алгоритмов само- обучения и самосовершенствования.
159
Восновеизложеннойпоследовательностирешенияпроблемы создания искусственного разума лежит, как отмечено, необходи- мость создания принципиально новой элементной базы в виде гетерогенной системы нового поколения искусственных клеток- нейронов существенно более близких естественным нейронам, чемсовременныетакназываемыеформальныенейроны. Функции новых нейронов, их структура, как и структура и алгоритмы ос- нованных на них нейронных сетей, должны быть предварительно отработаны на компьютерных моделях. Однако их конечная реа- лизация – это задача, очевидно, нанотехнологий.
Созданная таким образом система искусственного разума должна стать основой для разработок роботов различного назна- чения. Дляэтогопомиморассмотренныхинформационныхсистем неизбежно потребуются новые более совершенные манипуляци- онныеилокомоционныеисполнительныесистемыссоответству- ющими системами управления ими. Последние, очевидно, могут быть реализованы тоже в рамках общей нейронной структуры. Действительно, для разумных роботов с их повышенными функ- циональными возможностями необходимы и соответствующие улучшенныеисполнительныесистемы. Хотя, напервыйвзгляд, эта задача, кажется, выходит за рамки тематики книги, однако здесь имеетсяпрямаясвязь. Ужемноголетвмиреведутсяисследования по поиску принципиально новых приводов, по крайней мере не уступающих по своим характеристикам, включая и массогабарит- ныепараметры, естественныммышцам(проблемаискусственных мышц). Кардинальнымпутемеерешенияявляетсятакжесоздание новойэлементнойбазыввидеэлементарныхдвигательныхмикро- элементов, изпоследовательно-параллельногосоединениякоторых можнособиратьискусственныемышцыструктурноподобныеесте- ственным. Такимобразом, такоерешениеэтойпроблемысводится, как и проблема искусственного разума, к созданию гетерогенной системы искусственных двигательных клеток на общей нанотех- нологической основе.
Однимизпередовыхвнаучно-техническомразвитииразделов робототехники является экстремальная робототехника. И, по-
160