

Электр. машины. / Электрические машины - книги / Электрические машины - Учебное пособие
.pdfРис. 2.7. Механическая характеристика асинхронной машины
При анализе характеристики следует отметить два значения момента, важных с точки зрения эксплуатации. Это пусковой и максимальный моменты. Пусковой момент приближенно выражается (S=1) формулой
Mn |
= |
|
|
m U2 |
r' |
|
|
|
(2.20.а) |
|
|
|
|
1 |
2 |
|
|
|
|||
|
|
n [(r +r )2 |
+(x + x |
2 |
)2 |
] |
|
|||
|
0 |
1 |
2 |
|
1 |
|
|
|
||
Приближенное значение максимального электромагнитного момента в режиме двигателя
Mmax = |
|
m U 2 |
|
(2.20.б) |
|
|
|
1 |
|
||
|
|
|
|
|
|
n [r + r2 |
+(x + x |
)2 ] |
|||
0 |
1 |
1 |
1 |
2 |
|
Этот момент в режиме двигателя появляется при так называемомкритическом скольжении
Sкр = |
r' |
|
|
|
(2.21) |
2 |
|
|
|
||
|
|
|
|
|
|
r 2 |
+ (x |
+ x |
2 |
)2 |
] |
1 |
1 |
|
|
|
Если пренебречь сопротивлениемr1, то
|
|
r' |
|
(2.22) |
S = |
|
2 |
|
|
кр |
(x + x' |
) |
|
|
|
1 |
2 |
|
|
Для практических построений механической характеристики пользуются формулами Клосса [4], которые позволяют, не имея параметров машины, построить зависимости М= f(S) по каталожнымданным.
Возьмемотношение (2.19) к (2.20,6)
|
M |
2 r2 [r + r2 +(x +x' ) 2 ] |
(2.23) |
|||||||||||||||||||||||
|
|
S |
1 |
|
|
1 |
|
|
|
|
1 |
|
2 |
|
|
|||||||||||
Mmax = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
(r |
+ r2 ) + |
(x |
|
+x' |
|
)2 |
|
|
|
||||||||||||||||
|
|
|
1 |
|
|
S |
1 |
|
2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Согласно (2.21) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
r12 +(x1 |
+ x2' )2 |
|
= |
|
|
r2' |
|
|
(2.24) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sкр |
|
|
|
|||
Подставив (2.24) в (2.23). получим |
|
|
|
|
|
|
||||||||||||||||||||
|
M |
|
2 (1+ |
|
r1 |
|
Sкр) |
|
|
|
|
|
|
|
|
(2.25) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
M max |
|
S |
+ |
|
Sкр |
+2 r1 S |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
Sкр |
S |
|
|
|
|
|
r' |
|
|
|
кр |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
Приближенно принимаемr1≈ r2 и |
r1 |
|
|
S |
, тогда |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r' |
|
|
кр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
M |
|
= |
|
|
|
|
|
2 (1+ Sкр) |
|
|
(2.26) |
|||||||||||
|
|
|
Mmax |
|
|
|
|
S |
+ |
Sкр |
|
+ |
2 Sкр |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Sкр |
|
|
S |
|
|
|
|
|
|
|
|
|
|||||

Если в (2.26) пренебречь Sкр в числителе и 2Sкр в знаменателе, то получим упрощеннуюформулу [9]
|
M |
= |
|
|
|
|
|
2 |
|
|
|
(2.27) |
|
|
Mmax |
|
|
|
S |
+ |
Sкр |
|
|
||||
|
|
|
|
|
|
Sкр |
S |
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M = |
|
|
|
2 M max |
|
(2.28) |
||||||
|
|
|
S |
|
+ |
Sкр |
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Sкр |
|
S |
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
Далее, задаваясь скольжением S от 0 до 1, по формулам (2.25) или (2.28) строитсямеханическаяхарактеристика двигателя.
Для крупных машин, у которых сопротивлением r1 можно
пренебречь, механическую характеристику можно строить по упрощеннойформуле (2.28).
Максимальноескольжениеможноопределить:
1)по параметраммашины (2.21);
2)поупрощенномусоотношениюSkp=5·SH, гдеSH - номинальноескольжение;
3)по приближенной формуле Sкр =Sн (λ + λ2 −1) ,
гдеλ = M max перегрузочнаяспособность двигателя (принимает-
M н
сяпопаспортуили каталогу).
Момент асинхронного двигателя прямо пропорционален квадратунапряженияM=U2 .
Поэтому для построения механической характеристики при
изменении напряжения нужно максимальный Mmax и пусковой Мп моменты изменить пропорционально квадрату изменения подво-
димогонапряжения.
Механическая характеристика двигателя, построенная по уравнению(2.28), приведенанарис. 2.8.

Рис. 2.8. Механическая характеристика асинхронного двигателя
2.3.6. Пускасинхронныхдвигателей
А. Двигателисфазнымротором
Пуск в ход электродвигателей с фазным ротором производит-
ся с помощью резистора, включенного в цепь ротора (рис. 2.9). Такое включение уменьшает начальный пусковой ток и позволяет получить пусковой момент, близкий к максимальному моменту
двигателя. Ступени пускового резистора могут служить также для регулирования частоты вращения двигателя. В этом случае пуско-
регулируемые резисторы должны выдерживать безопасный для нихнагрев достаточно длительное время.
Рассчитывают эти резисторы двумя способами: графическим и
аналитическим.
Графический метод основан на прямолинейности механических характеристик в области рабочих скольжений. Вначале строитсярабочаячастьмеханической характеристики.
На вертикальной оси в определенном масштабе откладывают значения частоты вращения холостого хода nо, которые можно определить по формуле (2.1) или по паспортным данным.
Из точки, соответствующей номинальному моменту, проводят перпендикуляр Мна, откладывают на нем в масштабе значения частоты вращения ротора n1 и получают точку б (см. рис. 2.9).
Соединяя прямой точку б с точкой идеального холостого хода nо, получают естественную механическую характеристику двигателя nоб. Далее, задаваясь максимальным M1 и переключающим М2 пусковыми моментами, строим пусковые характеристики двигателя (рис. 2.9).
Для асинхронных электродвигателей обычно принимают М1=(1,8-2,5)Мн; М2=(1,1-1,2)Мн, где номинальный момент двигателя Мн в данном случае принимается равным нагрузочному Мс. т.е.Мн=Мс.
Рис. 2.9. а - схема включения пусковых резисторов в цепь ротора; б - пусковые характеристики АД
Отрезок аб между горизонтальной прямой n1a и естественной механической характеристикой n1б соответствует внутреннему активному сопротивлению, Ом, обмоткиротора r2
r |
= |
Sн |
R |
(2.29) |
|
2 |
|
100 |
2.н |
|
|
|
|
|
|
||
где Sн - номинальное скольжение электродвигателя. %;
R2.Н - активное сопротивление неподвижного ротора. Ом.
R |
= |
|
Ep.н. |
|
(2.29) |
2.н |
|
|
1,73 I р.н. |
|
|
где Iр.н. - номинальный токротора. А;
Eр.н. - ЭДС между кольцами неподвижного разомкнутого ротора, В.
Электродвижущую силу между кольцами замеряют с помощью вольтметра при заторможенном роторе или принимают по каталогу.
Отрезок дг в масштабе сопротивлений дает величину первой секции пускового резистора. Отрезки дг, гв и т. д. соответствуют сопротивлениям отдельных секций пускового резистора в порядке ихзамыкания.
Масштаб для сопротивлений, Ом/мм, mс =rр/аб.
При аналитическом расчете необходимо помнить, что для асинхронных двигателей обычно принимают три-пять ступеней ускорения.
Если число ступеней неизвестно, то их можно определить
|
lg |
10000 |
|
|
m = |
|
Sн M1 |
|
(2.31) |
|
|
lgλ |
|
|
где m - число ступеней резистора;
M1 - максимальный пусковой момент в процентах от номинального;
SH - номинальное скольжение, %;
Λ= M 1/M 2 - отношение максимального пускового момента к переключающему.
Если число ступеней резистора известно, то λ можно определить по следующимформулам:
- для нормального режима пуска (задаемся моментомM 2)
λ = m+1 |
10000 , |
(2.32) |
|
Sн M 2 |
|
где М2 задается в процентахот Мн:
- для форсированного режима пуска (задается моментом M1)
λ = m |
10000 |
(2.33) |
|
Sн M1 |
|
Сопротивление отдельныхсекций резистора каждой фазы:
r3 = rp (λ -1); r2, = r3· λ; r1 = r2· λ .
Б. Двигатели с короткозамкнутым ротором
Пусковой ток короткозамкнутого электродвигателя достигает 5 - 8-кратной величины номинального тока. При маломощной сети толчки тока вызывают значительное падение напряжения и тем самымотрицательно влияют на работу другихприемников.
Практически короткозамкнутые двигатели можно пускать в ход следующими способами:
-прямымвключениемв сеть на полное напряжение;
-переключениемпри пуске обмотки статора со звезды на тре-
угольник;
-введениемпри пуске в цепь статора активных и реактивных резисторов;
-помощью трансформаторов и автотрансформаторов и т. д. Прямое включение двигателя на полное напряжение обеспе-
чивает максимальный пусковой момент, но связано со значительными пусковыми токами, которые могут вызвать в сетяхбольшие

падения напряжения, величина которых зависит от соотношения между мощностями пускаемого в ход двигателя и питающего его трансформатора.
Пуск с помощью активного сопротивления в цепи статора применяют обычно для двигателей до 50 кВт; при большей мощности - с помощью индуктивного сопротивления.
В момент пуска в цепь каждой фазы обмотки статора включаются активные или индуктивные резисторы, которые шунтируются по достижении двигателем частоты вращения близкой к номинальной.
Резистор, включаемый в статорную обмотку, определяют заданными условиями снижения тока. Например, если требуется, чтобы ток при пуске с резистором составлял часть а от пускового токабезрезистора, то Iп.р. = α·Iп,
где Iп.р. - ток при включенном резисторе; Iп - ток при отсутствии пусковогорезистора.
Активное или индуктивное сопротивление резистора на фазу:
r = |
( z |
|
/α)2 −х2 |
−r |
|
(для |
дополнительного |
активного |
ре- |
|||
α |
к |
|
к |
k |
|
|
|
|
|
|
|
|
зистора); |
|
|
|
|
|
|
|
|
|
|
|
|
x = |
(z |
к |
/α) 2 −r2 |
− x |
k |
(для дополнительного индуктивного |
|
|||||
α |
|
|
к |
|
|
|
|
|
|
|
||
резистора), |
|
|
|
|
|
|
|
|
|
|
||
где Zk |
= UH/(1,73-Iп) - полное сопротивление фазы двигателя при |
|||||||||||
пуске, |
Ом; |
Uн |
- |
|
номинальное линейное |
напряжение |
двигателя; |
|||||
rк=zk·соsφп |
- |
активное сопротивление фазы |
двигателя |
при |
пуске, |
|||||||
Ом; xk=zk·sinφп - индуктивное сопротивление фазы двигателя при пуске. Ом;
cosϕ |
n |
= cosϕ |
[ |
M n |
|
|
ηн |
|
+γ k |
(1−η |
)]- (2-34) |
|
|
|
−S |
) k |
|||||||||
|
н |
|
M |
н |
(1 |
i |
н |
|
||||
|
|
|
|
|
|
|
н |
i |
|
|
|
|
- коэффициент мощности двигателя |
при пуске; |
|
|
|||||||||
ki = In - кратность пускового тока;
Iн
γ = 1 / 3 - отношение потерь в меди к номинальным потерям.
2.3.7. Торможение асинхронныхдвигателей
Динамическое торможение асинхронных двигателей заключается в том, что статор отключается от сети переменного тока и на
время торможенияподключается кисточнику постоянного тока. Постоянный ток создает в статоре неподвижное магнитное
поле, в котором поинерциибудетвращаться замкнутыйротор.
В обмотках ротора при этом индуцируется ЭДС и ток, т. е.
двигатель превращается в синхронный генератор с неподвижными полюсами, который обусловливает значительный тормозной момент, останавливающий двигатель. Тормозной момент зависит от
тока статора, а следовательно, от подводимого напряжения постоянного тока, сопротивлений статорной и роторной цепей, частоты
вращенияротора.
Для увеличения тормозного момента в обмотку ротора вводят
активное сопротивление или увеличивают значение постоянного тока, протекающегов цепистатора.
У электродвигателей с короткозамкнутым ротором начальные тормозные моменты малы и для их увеличения необходимо пода-
вать в статор постоянный ток, равный 4 - 5-кратному значению тока холостого хода. Для электродвигателей с фазным ротором эта величина снижается до (2-3)Ixх. При этом тормозной момент обес-
печивается впределах(1,25-2,2)Мн.
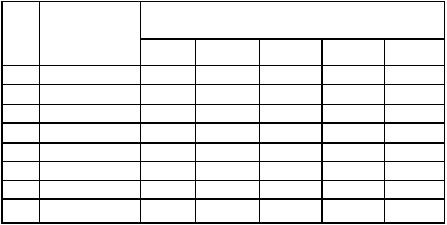
Величину тока холостого хода в процентах о номинального
токаможно приближенноопределить по табл. 2.4.
Величину добавочного тормозного резистора, введенного в
обмоткуротора, можноопределитьпоформуле
r =(0,2 ÷0,4) |
Eр.н. |
(2.35) |
|
|
|||
д |
1,73 |
I р.н. |
|
|
|
||
Напряжение постоянного тока, подводимое к обмотке статора при различных схемах соединения обмоток (рис.2.10), определит-
ся:
для схемы(рис.2.10, a): |
|
Uп= Iп·2·r1 |
|
|
||
для схемы (рис.2.10, б): |
|
Uп= Iп·3·r1, |
|
|
||
для схемы (рис.2.10, в, г): |
|
Uп= Iп·2/З·r1 |
|
|
||
для схемы(рис.2.10, д): |
|
Uп= Iп·l/2·r1, |
|
|
||
где r1 - активноесопротивлениефазыстатора; |
|
|
||||
|
Iп - постоянныйток. |
|
|
|
|
|
|
|
|
|
|
|
Таблица2.4 |
|
Мощностьэл. |
Синхроннаячастотавращения, об/мин |
||||
N |
двигателя, |
3000 |
1500 |
1000 |
750 |
500 |
вар. |
кВт |
|||||
1 |
0,1-0,5 |
60 |
75 |
85 |
90 |
- |
2 |
0,51-1,0 |
50 |
70 |
75 |
80 |
90 |
3 |
1,1-5,0 |
45 |
65 |
70 |
75 |
85 |
4 |
5,1 - 10,0 |
40 |
60 |
65 |
70 |
80 |
5 |
10,1-25,0 |
30 |
55 |
60 |
65 |
75 |
6 |
25,1-50,0 |
20 |
50 |
55 |
60 |
70 |
7 |
50,1 - 100,0 |
- |
40 |
45 |
50 |
60 |
8 |
100,0-200,0 |
- |
35 |
40 |
40 |
50 |
В режиме противовключения двигателем из сети потребляется большое количество энергии и протекает значительный ток. Рези-
стор, введенный в цепь ротора, ограничивает якорный ток и определяеттормозноймоментдвигателя.
Полное активное сопротивление резистора в цепи ротора при торможениипротивовключением
Rp =rp |
Sн.пр. |
(2.36) |
|
Sн |
|||
|
|
гдеSн.пр - номинальноескольжениеприпротивовключении; SH - номинальноескольжение.