

4ЭП ТАУ / Бланк Задание на КП
.DOCФедеральное агентство морского и речного транспорта
Омский институт водного транспорта
(филиал) ФБОУ ВПО «Новосибирская государственная академия водного транспорта»
Кафедра Электротехники и электрооборудования
(наименование кафедры)
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
по дисциплине: Теория автоматического управления
(наименование дисциплины в соответствии с учебным планом)
|
студенту группы: |
|
|
|
|
|
|
|
(группа) |
|
(ФИО студента) |
Тема курсовой работы: Исследование системы стабилизации угловой скорости
двигателя постоянного тока (ДПТ)
(название темы, в соответствии с утвержденной тематикой)
Задание: Провести исследование системы стабилизации частоты вращения двигателя без корректировки и с введённой корректирующей цепью
(краткое описание задания курсовой работы или проекта)
Дата выдачи задания: «___» _____________ 20___ г.
Срок сдачи на проверку: «___» _____________ 20___ г.
Срок защиты: «___» _____________ 20___ г.
Исходные данные к работе:
-
Вариант, согласно методическим указаниям – ;
-
Объект исследования – система стабилизации

-
Параметры звеньев
|
Тм, с |
Тя, с |
К0, рад/вс |
Т1, с |
К1, в/в |
Кт.г., вс/рад |
Кэу |
Кf, рад/снм |
Мос, Нм |
∆ωост, рад/с |
|
|
|
|
|
|
|
|
|
|
|
-
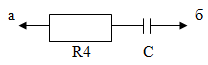
Схема и параметры элементов корректирующих звеньев
|
Схема и точки подключения |
Параметры схемы |
|
|
C = мкФ; R4 = кОм; R1 = Ом. |
Содержание расчетно-пояснительной записки (перечень подлежащих разработке вопросов):
Введение
Во введении студенту необходимо описать назначение системы стабилизации частоты вращения ДПТ.
1. Устройство и описание системы стабилизации.
Подробно описать устройство и принцип действия системы автоматического управления.
2. Исследование исходной системы стабилизации частоты вращения ДПТ.
Составить структурную схему и определить передаточные функции звеньев. Подсчитать передаточный коэффициент системы. Исследовать устойчивость системы, используя различные критерии устойчивости
3. Исследование системы стабилизации частоты вращения ДПТ с введением корректирующей цепи.
Включить в схему корректирующее звено. Исследовать скорректированную систему на устойчивость различными критериями устойчивости.
4. Проверка расчётов и устойчивости системы в программной среде Simulink.
Составить функциональную схему системы до коррекции и после в среде Simulink. Исследовать устойчивость системы с использованием различных критериев в среде Simulink.
Заключение
В заключении необходимо кратко указать результаты расчетов, с выводом о необходимости введения корректирующей цепи. Оценить результаты сделанных расчетов с результатами, полученными в среде Simulink.
Перечень графического материала (прикрепляется к пояснительной записке):
-
Результаты исследования устойчивости исходной системы стабилизации, 2 листа формата А4.
-
Результаты исследования устойчивости системы стабилизации после введения корректирующей цепи, 3 листа формата А4.
-
Результаты исследования устойчивости системы стабилизации, полученные в среде Simulink, 2 листа формата А4.
Список рекомендуемой литературы:
1. Теоретические основы автоматизированного управления. Учебник для вузов / Советов Б.Я., Цехановский В.В. – М.: Высшая школа. - 2006. - 462 с.
2. Теория автоматического управления. Линейные системы / Мирошник И.В. – СПб.: Питер. - 2006. - 272 с.
3. В.А. Бороденко. Практический курс теории линейных систем автоматического регулирования. Учебное пособие. – Павлодар: Кереку, 2007 – 260 с.
4. В.С. Щербаков, В.А. Глушец, А.А. Руппель, В.Е. Беляков. Основы моделирования систем автоматического управления в среде Mathlab. Учебное пособие – Омск: ОИВТ, 2009 – 237 с.
5. Решение прикладных задач в теории автоматического управления. Методические указания к лабораторным работам / Сост. В.С. Щербаков и др. – Омск: ОИВТ, 2009 – 40 с.
6. Теория автоматического управления. Программа, методические указания и задания на курсовую работу / Сост. В.Г. Власов. – Новосибирск: Новосиб. госуд. акад. вод. трансп., 1992. - 57 с.
Руководитель: к.т.н., доцент ________________ Т.В. Гоненко
(уч. степень) (уч. звание) (подпись) (И.О. Фамилия)
Задание принял к исполнению « » 20___ г. ________________
(дата) (подпись)