

Рабочая жидкость под давлением р1 = const поступает из полости А через рабочее проходное сечение редукционного клапана в полость Д с давлением р2 и через дроссель 2 на выход регулятора потока с давлением р3.
Вполостях В и Г на золотник 3 действует давление р2, а в полости Б – усилие пружины 4
идавление р3, зависящее от нагрузки.
Уравнение сил, действующих на золотник 3 (без учета сил трения) можно записать в следующем виде:
p |
3 |
|
π D 2 + P |
= p |
2 |
π ( D 2 − d 2 ) + p |
2 |
π d 2 |
, |
|
|
|
4 |
пр |
|
4 |
4 |
|
|||
|
|
|
|
|
|
|
|
|||
а перепад давления на дросселе 2
p = p2 |
− p3 |
= |
4 Pпр |
= const . |
|
π D 2 |
|||||
|
|
|
|
При увеличении перепада давления на регуляторе потока увеличивается давление р3, а, следовательно, и давление в полости Б. Поэтому золотник 4 автоматически переместится влево, увеличивая при этом рабочее проходное сечение редукционного клапана. При этом увеличивается расход Q через рабочее проходное сечение редукционного клапана и давление в полостях Г, В, и, следовательно давление р2. Давление р2 увеличивается до значения при котором достигается первоначальный перепад давления ∆р. В связи с этим расход через дроссель не изменится.
При уменьшении перепада давления на регуляторе потока ∆р, снижается давление р3, золотник 3 перемещается вправо, уменьшая при этом рабочее проходное сечение редукционного клапана, в результате чего давление р2 уменьшится до величины, при которой восстановится перепад давления на дросселе. Расход на регуляторе потока не уменьшится.
Рассмотренная схема типична для регуляторов потока, изготовляемых на номинальное давление до 20 МПа.
РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИЖЕНИЯ ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ В ГИДРОПРИВОДАХ
При эксплуатации машин, станков и технологических линий, оборудованных гидроприводом, возникает необходимость изменять скорость движения выходного звена их исполнительных механизмов.
Изменение скорости движения выходного звена исполнительных механизмов достигается путем регулирования, которое может быть дроссельным, объемным, объемно-дроссельным и при помощи приводящего двигателя.
Выбор способа регулирования определяется многими факторами и, в том числе, величиной регулируемой мощности, характером преодолеваемой гидродвигателем полезной нагрузки, требованиями к стабильности движения исполнительных механизмов, стоимостью комплектующего гидрооборудования, степенью сложности способа регулирования и др.
При отсутствии в гидроприводе регулируемых насосов или гидродвигателей бесступенчатое регулирование скорости движения выходного звена можно осуществлять дроссельным регулированием путем перепускания части рабочей жидкости, подаваемой насосом под давлением, через переливной гидроклапан.
При наличии в гидроприводе регулируемых насосов или гидромоторов можно осуществлять объемное регулирование изменением их рабочих объемов.
К объемному регулированию относят также ступенчатое регулирование, когда, включая или выключая часть насосов или гидродвигателей, изменяют их суммарные рабочие объемы.
Бесступенчатое регулирование скорости движения выходного звена при нерегулируемых насосах и гидродвигателях можно осуществлять также, изменяя частоту вращения двигателя, приводящего в действие насос.
21

ДОСТОИНСТВА И НЕДОСТАТКИ СПОСОБОВ РЕГУЛИРОВАНИЯ
Достоинства дроссельного регулирования
1.Высокая чувствительность.
2.Высокое быстродействие.
3.Малые усилия, требуемые для перемещения запорно-регулирующих элементов гидроаппаратуры.
4.Простота конструкции гидравлических устройств и их невысокая стоимость.
Недостатки дроссельного регулирования
1.Низкий КПД, обусловленный самим принципом дросселирования, поэтому гидроприводы с дроссельным регулированием обычно применяются при мощностях не более 3 ÷ 5 КВт.
Достоинства объемного регулирования
1.Сравнительно высокий КПД из-за меньших гидравлических потерь (η = 0,75 ÷ 0,95).
2.Более плавное реверсирование и торможение гидродвигателя по сравнению с распределением рабочей жидкости с помощью гидрораспределителей.
Недостатки объемного регулирования
1.Сложность системы автоматического регулирования рабочих объемов насосов и гидродвигателей.
2.Необходимость значительных усилий для перемещения элементов регулирования насосов и гидродвигателей, для чего применяют двухкаскадные гидроусилители мощности, имеющие низкий КПД.
ДРОССЕЛЬНОЕ РЕГУЛИРОВАНИЕ
Гидропривод, в котором регулирование скорости движения выходного звена гидродвигателя производят регулирующим гидроаппаратом посредством дросселирования, называют
гидроприводом с дроссельным регулированием. В гидроприводах с дроссельным регулирова-
нием применяют нерегулируемые насосы и гидродвигатели, а в качестве регулирующих устройств - регулируемые дроссели, регуляторы потока, дросселирующие распределители и гидроусилители мощности.
По схеме работы нерегулируемых насосов гидроприводы с дроссельным регулировани-
ем, подразделяют на две группы: гидроприводы с постоянным и переменным давлением. Для гидроприводов с постоянным давлением характерно наличие переливного клапана, который поддерживает в напорной линий постоянное давление путем непрерывного слива части рабочей жидкости в гидробак. В гидроприводе с переменным давлением в напорной линии давление изменяется в зависимости от нагрузки гидродвигателя, а переливной клапан играет роль предохранительного.
Выбор схемы гидропривода с дроссельным регулированием зависит от многих факторов. Основные из них: вид нагрузки гидродвигателя, точность и быстродействие отработки команды, КПД гидропривода, надежность гидравлических устройств и всего привода, а также факторы экономической эффективности.
Все схемы дроссельного регулирования основаны на том, что часть жидкости, подаваемой насосом, отводится в сливную гидролинию минуя гидродвигатель и не совершает полезной работы.
При дросселировании подача насоса
Qн = Qгд + Qсл,
где Qгд – расход жидкости, поступающей в гидродвигатель;
Qсл – расход жидкости, сбрасываемой через переливной гидроклапан или дроссель в гидробак, минуя гидродвигатель.
Скорость движения выходного звена гидродвигателя определяется следующим образом:
для гидроцилиндра vп = Qгд ,
Sп
где Sп – эффективная площадь поршня гидроцилиндра, м2;
22
для гидромотора |
nгм = |
Qгд |
, |
|
|
|
|||||
qгм |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||
где qгм – удельный расход гидродвигателя, м3. |
|
|
|||||||||
для поворотного гидроцилиндра ω = |
Qгд |
|
, |
||||||||
R S л |
n |
||||||||||
|
(D − d ) |
|
|
|
|
|
|
||||
где R = |
- плечо силы давления на лопасть, м; |
|
|||||||||
|
|
|
|||||||||
4 |
(D − d ) |
|
|
|
|
|
|
|
|||
S л = b |
|
– эффективная площадь лопасти, м2; |
|||||||||
|
|||||||||||
2 |
|
|
|
|
|
|
|
||||
n – количество лопастей, 1; b – ширина лопасти, м;
D и d – внешний и внутренний диаметры лопасти, соответственно, м.
Гидроприводы с дроссельным регулированием являются гидроприводами с разомкнутой циркуляцией. Они могут быть поступательного, поворотного и вращательного движения. Наибольшее распространение получили гидроприводы поступательного движения.
При дроссельном регулировании в гидросхеме дроссель или другой дросселирующий гидроаппарат может быть установлен:
−на входе (последовательно с гидродвигателем на напорной гидролинии);
−на выходе (последовательно с гидродвигателем на сливной гидролинии);
−на ответвлении (параллельно гидродвигателю на ответвлении от напорной гидролинии).
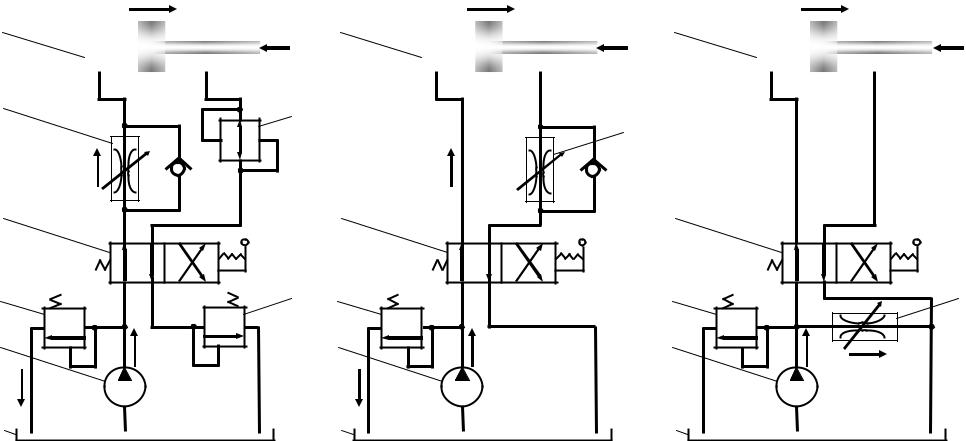
Рассмотрим сущность каждого из способов дроссельного регулирования на примере гидроприводов поступательного движения, принципиальные схемы которых приведены на рис. 1. В случае использования в качестве гидродвигателя гидромотора или поворотного гидродвигателя, принципиальные схемы имеют аналогичный вид.
В гидроприводе с дросселем на входе скорость движения силового органа регулируется следующим образом (рис. 1, а).
Жидкость из бака 1 нерегулируемым насосом 2 подается под давлением по напорной гидролинии через гидрораспределитель 4, регулируемый дроссель 5 в безштоковую полость гидроцилиндра 6. Под давлением жидкости поршень гидроцилиндра 6 перемещается вправо и вытесняет жидкость из штоковой полости гидроцилиндра через гидрораспределитель 4, в гидробак 1.
При полностью открытом дросселе скорость движения поршня максимальна. При уменьшении площади проходного сечения дросселя расход жидкости, поступающей от насоса в гидродвигатель, будет уменьшаться, благодаря чему будет уменьшаться и скорость движения поршня, а при полностью закрытом дросселе станет равной нулю.
Давление перед дросселем pн в напорной гидролинии определяется настройкой переливного клапана 3. В процессе работы оно практически не меняется.
С увеличением нагрузки F величины перепада давления на дросселе рдр, расхода жидкости, поступающей в гидродвигатель, Qгд и скорости движения поршня vп уменьшаются. При F = Fmax, рдр = 0, Qгд = 0, vп = 0 поршень остановится и весь поток рабочей жидкости будет поступать на слив через переливной гидроклапан, т.е. в этом случае Qн = Qсл.
Характер зависимостей давлений и скорости рабочего хода поршня гидроцилиндра от нагрузки даны на рис. 2, а.
При преодолении отрицательной нагрузки (вектор действия которой совпадаете вектором скорости движения поршня), с увеличением F также увеличиваются рдр, Qгд и vп. При определенном значении F возможен отрыв поршня от жидкости. Для исключе6ния этого в сливную гидролинию устанавливают ограничитель потока 7. Для того чтобы движение поршня было плавным на сливном трубопроводе устанавливают напорный гидроклапан 8, работающий как подпорный и отрегулированный на давление 0,15 ÷ 0,3 МПа.
23
|
|
vп |
|
|
vп |
|
|
vп |
||||||||||||
6 |
|
|
|
|
|
F |
6 |
|
|
|
|
|
F |
6 |
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
7 |
|
|
|
|
5 |
|
|
|
|
|
Qгд |
|
|
Qгд |
4 |
|
4 |
4 |
3 |
8 |
3 |
3 |
2 |
|
2 |
2 |
Qн |
|
|
Qн |
Qсл |
|
Qсл |
|
1 |
|
1 |
1 |
а |
б |
Qгд
|
5 |
Qн |
Qсл |
|
в
Рис. 1. Варианты схем гидроприводов с дроссельным регулированием с установкой дросселя: а – на входе; б – на выходе; в – на ответвлении от напорной линии;
1 – гидробак; 2 – насос; 3, 8 – напорный гидроклапан; 4 – гидрораспределитель; 5 –дроссель; 6 – гидроцилиндр; 7 – ограничитель потока
24
Как уже было сказано с изменением внешней нагрузки давление в напорной гидролинии за дросселем изменится, в связи с чем изменится и перепад давления на дросселе, а, следовательно, и расход жидкости, поступающей в гидродвигатель, что приведет к изменению скорости движения поршня. Поэтому, регулирование при помощи дросселя, установленного на входе, не обеспечивает постоянства скорости движения поршня при переменной нагрузке на него.
Эту схему нельзя применять в грузоподъемных машинах, так как груз может упасть вследствие недостаточного противодействия силы трения поршня о гидроцилиндр и сопротивления сливной гидролинии. К недостаткам рассматриваемого гидропривода можно также отнести низкий КПД привода (η ≤ 0,36) и нагрев цилиндра жидкостью, поступающей в него после дросселирования.
Расположением дросселя на выходе (рис. 1, б) обеспечивается работа гидропривода при знакопеременной нагрузке. Эту схему можно успешно применять для грузоподъемных машин, штабелеров, кранов, так как при любом направлении движения поршня под действием внешней нагрузки обеспечивается плавное перемещение груза, так как дроссель, установленный на выходе гидродвигателя, создает подпор, необходимый для стабилизации сил трения и
обеспечивающий плавное начало движения поршня при рабочем ходе. Поэтому в данном случае подпорный клапан и ограничитель потока, которые устанавливают в схеме с дросселем на входе, не требуются. Кроме того, жидкость, нагреваясь при прохождении через дроссель, направляется в гидробак, минуя гидродвигатель. Поэтому перетечки в гидродвигателе из-за меньшего нагрева рабочей жидкости и самого гидродвигателя в этом случае будут меньше.
К недостаткам этой схемы регулирования гидропривода можно отнести меньшую экономичность по сравнению со схемой гидропривода с дросселем на входе (часть мощности гидродвигателя затрачивается на преодоление противодавления), а также как и для предыдущей схемы, зависимость скорости движения выходного звена гидродвигателя от нагрузки.
При установке дросселя на ответвлении от напорной гидролинии (рис.1, в) рабочая жидкость в количестве Qсл = Qн − Qгд сливается в бак не через переливной клапан, а через
дроссель. Клапан в этой схеме управления выполняет функцию предохранительного и перепускает жидкость только в случае превышения заданной нагрузки. Поэтому в энергетическом отношении гидропривод с дросселем на ответвлении экономичнее, чем системы с дросселем на входе или с дросселем на выходе.
Эта схема дроссельного регулирования относится к гидроприводам с переменным давлением.
При полностью закрытом дросселе вся рабочая жидкость подается в гидродвигатель. В этом случае Qсл = 0 , Qгд = Qн, а vп = vmax . При полностью открытом дросселе весь по-
ток поступает в бак через дроссель. В этом случае Qсл = Qн, Qгд = 0 , а vп = 0 .
Как и в двух предыдущих схемах дроссельного регулирования, в этом случае перепад давлений у дросселя, расход дросселя и скорость движения выходного звена гидродвигателя зависят от нагрузки. Неравномерность движения выходного звена гидродвигателя при этом способе регулирования больше, чем при применении двух других способов дроссельного регулирования, из-за влияния утечек рабочей жидкости в гидросистеме, вызванных изменением дав-
ления рн.
Недостатком такой схемы регулирования является также и невозможность регулирования скорости при отрицательных нагрузках, т.е. в тех случаях, когда направление действия нагрузки совпадает с направлением движения выходного звена гидродвигателя.
Для гидроприводов с дросселем на ответвлении характерны следующие преимущества: они имеют более высокий КПД по сравнению с гидроприводами с постоянным давлением, так как мощность рассматриваемого гидропривода зависит от нагрузки; тепловой поток, образующийся при дросселировании рабочей жидкости, отводится вместе с жидкостью в бак.
Схему с установкой дросселя на ответвлении применяют, когда преодолеваемая нагрузка имеет выраженные пики.
Наибольшее применение получил способ с установкой дросселя на выходе.
Как видно, ни один из рассмотренных способов дроссельного регулирования с использованием дросселей не обеспечивает стабильных скоростей движения выходного звена гидродвигателя в условиях изменяющейся нагрузки (рис. 2).
25

|
|
p, v |
|
|
|
|
|
|
|
|
|
p, v |
|
|
|
p, v |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
pн= pпк |
|
|
|
|
|
|
|
|
pн= pпк= p1 |
|
|
|
|
pпк |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pтр |
|
|
|
|
|
|
|
|
|
|
|
|||
|
pдр |
|
|
|
|
p1 |
|
pдр |
|
|
|
|
|
|
|
|
p2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
v |
рн = р1 |
|
|
|
|
|
|
v |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pдр |
|||||||||
|
|
|
|
|
pтр |
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
п |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pтр |
|
||||||
|
|
|
|
|
|
|
|
p2 |
|
|
|
|
|
|
|
|
|
|
p3 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p2 |
|
|||||||||||||||
-F |
|
Fmax |
+F |
|
-F |
|
|
|
|
|
Fmax |
+F |
-F |
|
|
Fmax |
+F |
|||||||||||||||||
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|||||||
|
|
|
|
|
|
|
|
|
Рис. 2. Характер зависимостей p = f ( F ) и v = f ( F ) при установке дросселя: |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
а – на входе; б – на выходе, в – на ответвлении от напорной линии |
|
|
|
|
|
|
|
|||||||||||||||
|
p, v |
|
|
|
|
|
|
|
p, v |
|
|
|
|
|
|
|
|
|
|
p, v |
|
|
vп |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
pн= рпк |
|
|
|
|
|
|
|
|
|
|
|
pн= pпк= p1 |
|
|
|
|
|
|
|
рпк |
|
|
|||||||
|
|
p4 |
|
|
|
|
|
|
|
|
|
|
|
|
pтр |
|
|
|
pн= p1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
pдр |
|
|
|
|
|
|
|
|
|
|
|
|
p2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p4 |
|
||||
|
|
|
|
|
|
|
p1 = p3 |
|
|
|
|
v |
|
|
|
р4 |
v |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
pтр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pдр |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pдр |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
p2 |
|
|
|
|
|
|
|
|
|
|
|
p3 |
|
|
|
|
|
|
p3 = р2 |
|
|||||||
|
-F |
|
F′max |
+F |
-F |
|
|
|
Fmax F′max |
+F |
-F |
|
|
Fmax |
+F |
|||||||||||||||||||
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|||||||
|
|
|
|
|
|
|
|
Рис. 3. Характер зависимостей |
p = f ( F ) и v = f ( F ) при установке регулятора потока: |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
а – на входе; б – на выходе, в – на ответвлении от напорной линии |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||