

5 Выбор корректирующего устройства
Можно применить, например, последовательное интегро-дифференцирующее звено с передаточной функцией
W(p)=![]()
Примером интегродифференцирующего контура может служить схема
























Логарифмические характеристики полученной системы:



Из графиков видно, что система имеет хорошие запасы устойчивости по модулю порядка 12 дб, по фазе порядка 60°. Быстродействие позволит системе быстро реагировать на возмущения, а параметры устойчивости не позволят вывести САР из равновесия.
8. Анализ качества сар.
Проанализируем переходные процессы в синтезированной САР:
Для разомкнутой САР:
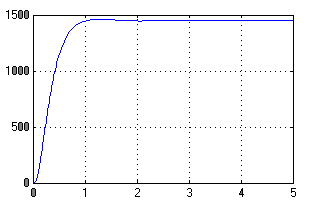
Переходной процесс выходной координаты при максимально возможном изменении управляющего воздействия для разомкнутой САР:


Переходный процесс выходной координаты при максимальном скачке возмущения:

Для замкнутой разработанной САР.
Переходной процесс выходной координаты при максимально возможном изменении управляющего воздействия для замкнутой САР:
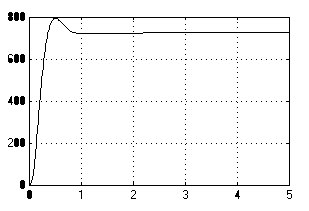

Переходный процесс выходной координаты при максимальном скачке возмущения:


Графики переходных процессов наглядно показывают, что спроектированная САР удовлетворяет всем требованиям точности и быстродействия.
9. Заключение.
Была спроектирована система автоматического управления температурой в области резания. Система удовлетворяет всем требуемым параметрам. Выбранный и использованный в проектировании метод с использованием ЛЧХ очень удобен благодаря своей простоте, наглядности и точности, что позволило сравнительно легко провести анализ и синтез САР. Мы получили систему, отвечающую всем поставленным требованиям, следовательно поставленная задача выполнена.
10. Список литературы.
1. Бесекерский В.А. «Сборник задач по теории автоматического регулирования и управления» - М.: Наука, 1978г.
2. Топчеев Ю.И. «Атлас для проектирования систем автоматического регулирования» - М.: Машиностроение, 1989г.
3. Копылов И. П. Справочник по электрическим машинам, том 1. Москва Энергоатомиздат, 1988.
4. А.А.Воронов “Основы теории автоматического регулирования и управления”, М., Высшая школа, 1997.