

- •Максим Семенович красс,
- •Борис Павлович чупрынов
- •Основы математики и ее приложения
- •В экономическом образовании
- •117571, Mocква, пр-т Вернадского, 82
- •109088. Москва, ж-88 Южнопортовая ул., 24
- •Предисловие
- •Введение
- •Раздел I. Основы математики Часть 1. Математический анализ
- •Глава 1. Множества
- •1.1. Множества. Основные обозначения. Операции над множествами
- •1.2. Вещественные числа и их свойства
- •А. Сложение и умножение вещественных чисел
- •В. Сравнение вещественных чисел
- •С. Непрерывность вещественных чисел.
- •1.3. Числовая прямая (числовая ось) и множества на ней
- •1.4. Грани числовых множеств
- •1.5. Абсолютная величина числа
- •Упражнения
- •Глава 2. Предел последовательности
- •2.1. Числовые последовательности Числовые последовательности и операции над ними
- •Понятие сходящейся последовательности
- •Основные свойства сходящихся последовательностей
- •Число е
- •2.2 Применение в экономике
- •Упражнения
- •Глава 3. Функции одной переменной
- •3.1. Понятие функции Определение функциональной зависимости
- •Способы задания функций
- •Область определения функции
- •Приложения в экономике
- •3.2. Предел функции Предел функции в точке
- •Левый и правый пределы функции
- •Предел функции при х , X -, х
- •3.3. Теоремы о пределах функций
- •3.4. Два замечательных предела
- •3.5. Бесконечно малые и бесконечно большие функции
- •3.6. Понятие непрерывности функции
- •3.7. Непрерывность элементарных функций Непрерывность элементарных функций в точке
- •Непрерывность функции на интервале и отрезке
- •Классификация точек разрыва функции
- •3.8. Понятие сложной функции
- •3.9. Элементы аналитической геометрии на плоскости Уравнение линии на плоскости
- •Линии первого порядка
- •Линии второго порядка
- •Упражнения
- •Глава 4. Основы дифференциального исчисления
- •4.1. Понятие производной Определение производной
- •Геометрический смысл производной
- •Физический смысл производной
- •Правая и левая производные
- •Уравнение касательной к графику функции в данной точке
- •4.2. Понятие дифференциала функции Определение и геометрический смысл дифференциала
- •Приближенные вычисления с помощью дифференциала
- •4.3. Правила дифференцирования суммы, произведения и частного
- •4.4. Таблица производных простейших элементарных функций
- •4.5. Дифференцирование сложной функции
- •4.6. Понятие производнойn-го порядка
- •Упражнения
- •Глава 5. Применение производных в исследовании функций
- •5.L.Раскрытие неопределенностей Правило Лопиталя
- •Неопределенности вида
- •Другие виды неопределенностей
- •5.2. Формула Маклорена Разложение функций по формуле Маклорена
- •Формула Маклорена в асимптотических формулах и вычислениях пределов функций
- •5.3. Исследование функций и построение графиков Признак монотонности функции
- •Точки локального экстремума
- •Выпуклость и точки перегиба графика функции
- •Асимптоты графика функции
- •5.4. Применение в экономике Предельные показатели в микроэкономике
- •Максимизация прибыли
- •Закон убывающей эффективности производства
- •Упражнения
- •Глава 6.Неопределенный интеграл
- •6.1. Первообразная и неопределенный интеграл Понятие первообразной функции
- •Неопределенный интеграл
- •6.2. Основные свойства неопределенного интеграла
- •6.3. Таблица основных неопределенных интегралов
- •6.4. Основные методы интегрирования Непосредственное интегрирование
- •Метод подстановки
- •Интегрирование по частям
- •Рациональная функция от sin х и cos х
- •Рациональная функция от еx
- •Классы интегрируемых функций
- •7.2. Основные свойства определенного интеграла
- •7.3. Основная формула интегрального исчисления
- •7.4. Основные правила интегрирования Замена переменной в определенном интеграле
- •Интегрирование по частям в определенном интеграле
- •7.5. Геометрические приложения определенного интеграла Площадь плоской фигуры
- •Объем тела вращения
- •7.6. Некоторые приложения в экономике
- •Дневная выработка
- •Выпуск оборудования при постоянном темпе роста
- •7.7. Несобственные интегралы
- •Упражнения
- •Глава 8. Функции нескольких переменных
- •8.1. Евклидово пространствоEm Евклидова плоскость и евклидово пространство
- •Понятия m-мерного координатного пространства и m-мерного евклидова пространства
- •8.2. Множества точек евклидова пространстваЕm Примеры множеств евклидова пространства Еm
- •Понятие функции нескольких переменных
- •Некоторые виды функций нескольких переменных
- •Линии уровня
- •8.3. Частные производные функции нескольких переменных Частные производные первого порядка
- •Градиент
- •Частные производные высших порядков
- •8.4. Локальный экстремум функции нескольких переменных Определение и необходимые условия существования локального экстремума
- •Достаточные условия существования локального экстремума
- •8.5. Применение в задачах экономики Экстремум функции нескольких переменных
- •Прибыль от производства разных видов товара
- •Оптимальное распределение ресурсов
- •Максимизация прибыли производства продукции
- •Метод наименьших квадратов
- •Упражнения
- •Часть 2. Элементы теории обыкновенных дифференциальных уравнений
- •Глава 9. Дифференциальные уравнения первого порядка
- •9.1. Основные понятия Базовые определения
- •Геометрический смысл уравнения первого порядка
- •9.2. Уравнения с разделяющимися переменными
- •9.3. Неполные уравнения
- •9.4. Линейные уравнения первого порядка
- •Упражнения
- •Глава 10. Дифференциальные уравнения второго порядка
- •10.1. Основные понятия теории
- •10.2. Уравнения, допускающие понижение порядка
- •10.3. Линейные дифференциальные уравнения второго порядка с постоянными коэффициентами
- •Однородные уравнения второго порядка
- •Неоднородные уравнения второго порядка
- •10.4. Краевая задача для дифференциального уравнения второго порядка
- •Упражнения
- •Глава 11. Аппарат дифференциальных уравнений в экономике
- •11.1. Дифференциальные уравнения первого порядка Модель естественного роста выпуска
- •Рост выпуска в условиях конкуренции
- •Динамическая модель Кейнса
- •Неоклассическая модель роста
- •11.2. Дифференциальные уравнения второго порядка (модель рынка с прогнозируемыми ценами)
- •Упражнения
- •Часть 3. Элементы линейной алгебры Глава 12.Векторы
- •12.1. Векторное пространство
- •Понятие и основные свойства вектора
- •Операции над векторами
- •Скалярное произведение векторов
- •12.2. Линейная зависимость векторов Линейно зависимые и линейно независимые системы векторов
- •Базис и ранг системы векторов
- •12.3. Разложение вектора по базису Представление вектора в произвольном базисе
- •Разложение вектора в ортогональном базисе
- •Упражнения
- •Глава 13.Матрицы
- •13.1. Матрицы и операции над ними Понятие матрицы
- •Линейные операции над матрицами
- •Транспонирование матриц
- •Умножение матриц
- •Собственные значения и собственные векторы матрицы
- •13.2. Обратная матрица Ранг матрицы
- •Понятие обратной матрицы
- •Упражнения
- •Глава 14.Определители
- •14.1. Операции над определителями и основные свойства Понятие определителя
- •Основные свойства определителей
- •Миноры и алгебраические дополнения
- •14.2. Ранг матрицы и системы векторов
- •Упражнения
- •Глава 15. Системы линейных алгебраических уравнений
- •15.1. Основные понятия Общий вид и свойства системы уравнений
- •Матричная форма системы уравнений
- •15.2. Методы решения систем линейных уравнений Метод обратной матрицы и теорема Крамера
- •Решение системы общего вида
- •Метод Гаусса
- •15.3. Вычисление обратной матрицы методом Гаусса
- •15.4. Геометрическая интерпретация системы линейных уравнений
- •15.5. Однородные системы линейных уравнений
- •Решение системы однородных уравнений
- •Фундаментальная система решений
- •Характеристическое уравнение
- •Упражнения
- •Глава 16. Применение элементов линейной алгебры в экономике
- •16.1. Использование алгебры матриц
- •Матричные вычисления
- •Использование систем линейных уравнений
- •16.2. Модель Леонтьева многоотраслевой экономики
- •Балансовые соотношения
- •Линейная модель многоотраслевой экономики
- •Продуктивные модели Леонтьева
- •16.3. Линейная модель торговли
- •Упражнения
- •Часть 4. Элементы теории вероятностей Глава 17. Основные положения теории вероятностей
- •17.1. Основные понятия теории вероятностей Некоторые формулы комбинаторики
- •Виды случайных событий
- •Классическое определение вероятности
- •17.2. Теорема сложения вероятностей Несовместные события
- •Полная группа событий
- •Противоположные события
- •17.3. Теорема умножения вероятностей Произведение событий и условная вероятность
- •Независимые события
- •17.4. Обобщения теорем сложения и умножения Появление только одного из независимых событий
- •Теорема сложения вероятностей совместных событий
- •Формула полной вероятности
- •Формулы Байеса
- •17.5. Схема независимых испытаний Формула Бернулли
- •Локальная теорема Лапласа
- •Интегральная теорема Лапласа
- •Отклонение относительной частоты от постоянной вероятности
- •Упражнения
- •Глава 18. Случайные величины
- •18.1. Случайные величины и законы их распределения Виды случайных величин
- •Дискретные случайные величины
- •Биномиальное распределение
- •Распределение Пуассона
- •18.2. Числовые характеристики дискретных случайных величин
- •Математическое ожидание дискретной случайной величины
- •Свойства математического ожидания
- •Дисперсия дискретной случайной величины
- •Свойства дисперсии
- •Среднее квадратическое отклонение
- •Начальные и центральные моменты
- •18.3. Система двух случайных величин Двумерная случайная величина
- •Корреляционный момент
- •Коэффициент корреляции
- •Линейная регрессия
- •18.4. Непрерывные случайные величины Функция распределения и ее свойства
- •Плотность распределения вероятностей и ее свойства
- •Числовые характеристики непрерывных случайных величин
- •18.5. Основные распределения непрерывных случайных величин Равномерное распределение
- •Нормальное распределение
- •Асимметрия и эксцесс
- •18.6. Некоторые элементы математической статистики Задачи математической статистики
- •Выборки
- •Способы отбора
- •Статистическое распределение выборки
- •Эмпирическая функция распределения
- •Полигон и гистограмма
- •Статистические оценки параметров распределения
- •Виды дисперсий
- •Эмпирические моменты
- •Асимметрия и эксцесс эмпирического распределения
- •Упражнения
- •Раздел II. Основы оптимального управления
- •Часть 5. Элементы линейного программирования Общая постановка задачи
- •Виды математических моделей
- •Глава 19. Элементы аналитической геометрии Вn-мерном пространстве
- •19.1. Основные понятия и определения
- •19.2. Решение систем mлинейных неравенств с двумя переменными
- •Упражнения
- •Глава 20. Графический метод
- •20.1. Постановка задачи
- •20.2. Алгоритм решения задач
- •20.3. Выбор оптимального варианта выпуска изделий
- •20.4. Экономический анализ задач с использованием графического метода
- •Упражнения
- •Глава 21.Симплексный метод
- •21.1. Общая постановка задачи
- •21.2. Алгоритм симплексного метода
- •21.3. Анализ эффективности использования производственного потенциала предприятия
- •21.4. Альтернативный оптимум
- •Упражнения
- •Глава 22. Двойственность в линейном программировании
- •22.1. Виды двойственных задач и составление их математических моделей Симметричные двойственные задачи
- •Несимметричные двойственные задачи
- •Смешанные двойственные задачи
- •22.2. Основные теоремы двойственности
- •22.3. Решение двойственных задач Решение симметричных задач
- •Решение несимметричных задач
- •Решение смешанных двойственных задач
- •22.4. Экономический анализ задач с использованием теории двойственности
- •22.5. Стратегическое планирование выпуска изделий с учетом имеющихся ресурсов
- •Упражнения
- •Глава 23.Транспортная задача
- •23.1. Общая постановка задачи
- •23.2. Нахождение исходного опорного решения
- •23.3. Определение эффективного варианта доставки изделий к потребителю
- •23.4. Проверка найденного опорного решения на оптимальность
- •23.5. Переход от одного опорного решения к другому
- •23.6. Альтернативный оптимум в транспортных задачах
- •23.7. Вырожденность в транспортных задачах
- •23.8. Открытая транспортная задача
- •23.9. Определение оптимального варианта перевозки грузов с учетом трансформации спроса и предложений
- •23.10. Экономический анализ транспортных задач
- •23.11. Приложение транспортных моделей к решению некоторых экономических задач
- •23.12. Выбор оптимального варианта использования производственного оборудования
- •Упражнения
- •Глава 24. Целочисленное программирование
- •24.1. Общая формулировка задачи
- •24.2. Графический метод решения задач
- •24.3. Прогнозирование эффективного использования производственных площадей
- •24.4. Метод Гомори
- •Упражнения
- •Глава 25. Параметрическое линейное программирование
- •25.1. Постановка задачи
- •25.2. Линейное программирование с параметром в целевой функции
- •25.3. Определение диапазона оптимального решения выпуска продукции при изменении условий реализации
- •25.4. Транспортная параметрическая задача
- •25.5. Нахождение оптимальных путей транспортировки грузов при нестабильной загрузке дорог
- •Упражнения
- •Глава 26.Задача о назначениях
- •26.1. Постановка задачи
- •26.2. Алгоритм решения задачи
- •26.3. Планирование загрузки оборудования с учетом максимальной производительности станков
- •26.4. Выбор инвестиционных проектов в условиях ограниченности финансовых ресурсов
- •Упражнения
- •Глава 27. Задачи с несколькими целевыми функциями
- •27.1. Формулировка задачи
- •27.2. Математическая модель нахождения компромиссного решения
- •27.3. Определение оптимального выпуска продукции при многокритериальных экономических показателях
- •Упражнения
- •Часть 6. Элементы оптимального управления Глава 28.Нелинейное программирование
- •28.1. Общая постановка задачи
- •28.2. Графический метод
- •Задача с линейной целевой функцией и нелинейной системой ограничений
- •Задача с нелинейной целевой функцией и линейной системой ограничений
- •Задача с нелинейной целевой функцией и нелинейной системой ограничений
- •28.3. Дробно-линейное программирование Математическая модель задачи
- •Алгоритм решения
- •Экономическая интерпретация задач дробно-линейного программирования
- •Применение дробно-линейного программирования для определения себестоимости изделий
- •Сведение экономико-математической модели дробно-линейного программирования к задаче линейного программирования
- •28.4. Метод множителей Лагранжа Постановка задачи
- •Расчет экономико-математической модели при нелинейных реализациях продукции
- •Упражнения
- •Глава 29.Динамическое программирование
- •29.1. Постановка задачи
- •29.2. Некоторые экономические задачи, решаемые методами динамического программирования Оптимальная стратегия замены оборудования
- •Оптимальное распределение ресурсов
- •Распределение инвестиций для эффективного использования потенциала предприятия
- •Минимизация затрат на строительство и эксплуатацию предприятий
- •Нахождение рациональных затрат при строительстве трубопроводов и транспортных артерий
- •Упражнения
- •Глава 30.Сетевые модели
- •30.1. Основные понятия сетевой модели
- •Расчет временных параметров сетевого графика
- •Построение сетевого графика и распределение ресурсов
- •Учет стоимостных факторов при реализации сетевого графика
- •Обоснование привлекательности проекта по выпуску продукции
- •30.2. Минимизация сети
- •Алгоритм решения
- •Нахождение кратчайшего пути
- •Задача замены автомобильного парка
- •Упражнения
- •Часть 7. Принятие решений и элементы планирования Глава 31. Основные понятия теории игр
- •31.1. Графическое решение игр вида (2 xn) и (mx 2)
- •31.2. Решение игр (aij)mxnс помощью линейного программирования
- •31.3. Применение матричных игр в маркетинговых исследованиях
- •31.4. Сведение матричной игры к модели линейного программирования
- •31.5. Игры с "природой"
- •31.6. Определение производственной программы предприятия в условиях риска и неопределенности с использованием матричных игр
- •31.7. "Дерево" решений
- •Выбор оптимальной стратегии развития предприятия в условиях трансформации рынка
- •Принятие решения о замене оборудования в условиях неопределенности и риска
- •Упражнения
- •Глава 32. Элементы системы массового обслуживания (смо)
- •32.1. Формулировка задачи и характеристики смо
- •32.2. Смо с отказами
- •Формулы для установившегося режима
- •32.4. Смо с ожиданием и с ограниченной длиной очереди Основные понятия
- •Формулы для установившегося режима
- •32.5. Определение эффективности использования трудовых и производственных ресурсов в системах массового обслуживания
- •Упражнения
- •Глава 33. Некоторые модели управления запасами
- •33.1. Общая постановка задачи
- •33.2. Основная модель управления запасами
- •33.3. Модель производственных запасов
- •33.4. Модель запасов, включающая штрафы
- •33.5. Решение экономических задач с использованием моделей управления запасами
- •Упражнения
- •Часть 8. Практикум
- •2. Задачи на случайные величины
- •П6. Задания по теме "Линейное программирование"
- •П7. Задания по теме "Нелинейное программирование"
- •П8. Задания по теме "Динамическое программирование"
- •П9. Задания по теме "Сетевые модели"
- •П10. Задания по теме "Теория игр"
- •П11. Задания по теме "Система массового обслуживания"
- •Ответы к упражнениям
- •Содержание
- •Глава 24. Целочисленное программирование 270
19.2. Решение систем mлинейных неравенств с двумя переменными
Дана система т линейных неравенств с двумя переменными

Знаки некоторых или всех неравенств могут быть ≥.
Рассмотрим первое неравенство в системе координат Х1ОХ2. Построим прямую
![]()
которая является граничной прямой.
Эта прямая делит плоскость на две полуплоскости 1 и 2 (рис. 19.4).

Полуплоскость 1 содержит начало координат, полуплоскость 2 не содержит начала координат.
Для определения, по какую сторону от граничной прямой расположена заданная полуплоскость, надо взять произвольную точку на плоскости (лучше начало координат) и подставить координаты этой точки в неравенство. Если неравенство справедливо, то полуплоскость обращена в сторону этой точки, если не справедливо, то в противоположную от точки сторону.
Направление полуплоскости на рисунках показываем стрелкой.
Определение 15. Решением каждого неравенства системы является полуплоскость, содержащая граничную прямую и расположенная по одну сторону от нее.
Определение 16. Пересечение полуплоскостей, каждая из которых определяется соответствующим неравенством системы, называется областью решения системы (ОР).
Определение 17. Область решения системы, удовлетворяющая условиям неотрицательности (xj ≥ 0, j = ), называется областью неотрицательных, или допустимых, решений (ОДР).
Если система неравенств совместна, то ОР и ОДР могут быть многогранником, неограниченной многогранной областью или одной точкой.
Если система неравенств несовместна, то ОР и ОДР — пустое множество.
Пример 1. Найти ОР и ОДР системы неравенств и определить координаты угловых точек ОДР

Решение. Найдем ОР первого неравенства: х1 + 3x2 ≥ 3. Построим граничную прямую х1 +3x2 – 3 = 0 (рис. 19.5). Подставим координаты точки (0,0) в неравенство: 1∙0 + 3∙0 > 3; так как координаты точки (0,0) не удовлетворяют ему, то решением неравенства (19.1) является полуплоскость, не содержащая точку (0,0).
Аналогично найдем решения остальных неравенств системы. Получим, что ОР и ОДР системы неравенств является выпуклый многогранник ABCD.

Найдем угловые точки многогранника. Точку А определим как точку пересечения прямых
![]()
Решая систему, получим А(3/7, 6/7).
Точку В найдем как точку пересечения прямых
![]()
Из системы получим B(5/3, 10/3). Аналогично найдем координаты точек С и D: С(11/4; 9/14), D(3/10; 21/10).
Пример 2. Найти ОР и ОДР системы неравенств


Решение. Построим прямые и определим решения неравенств (19.5)-(19.7). ОР и ОДР являются неограниченные многогранные области ACFM и ABDEKM соответственно (рис. 19.6).
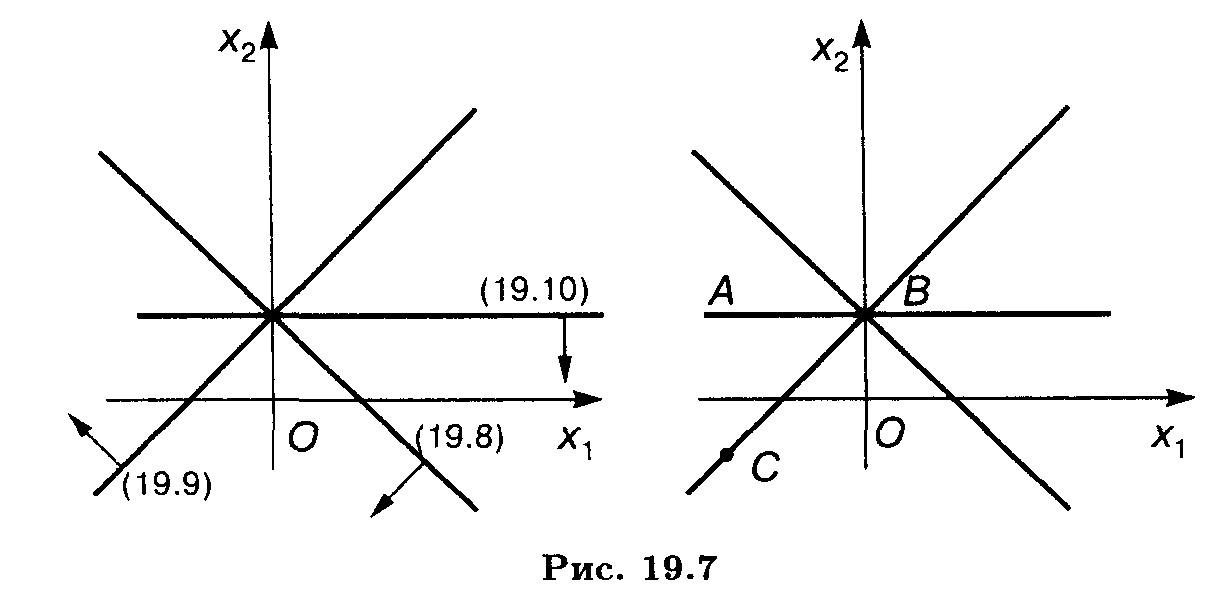
Пример 3. Найти ОР и ОДР системы неравенств

Решение. Найдем решения неравенств (19.8)-(19.10) (рис. 19.7). ОР представляет неограниченную многогранную область ABC; ОДР — точка В.
Пример 4. Найти OP и ОДР системы неравенств

Решение. Построив прямые, найдем решения неравенств системы. ОР и ОДР несовместны (рис. 19.8).
Упражнения
Найти ОР и ОДР систем неравенств


Глава 20. Графический метод
20.1. Постановка задачи
Наиболее простым и наглядным методом линейного программирования является графический метод. Он применяется для решения задач ЛП с двумя переменными, заданными в неканонической форме, и многими переменными в канонической форме при условии, что они содержат не более двух свободных переменных.
С геометрической точки зрения в задаче линейного программирования ищется такая угловая точка или набор точек из допустимого множества решений, на котором достигается самая верхняя (нижняя) линия уровня, расположенная дальше (ближе) остальных в направлении наискорейшего роста.
Для нахождения экстремального значения целевой функции при графическом решении задач ЛП используют вектор L() на плоскости Х1ОХ2, который обозначим . Этот вектор показывает направление наискорейшего изменения целевой функции, он равен
![]()
где е1 и е2 — единичные векторы по осям OX1 и ОX2 соответственно; таким образом, = (∂L/∂х1, ∂L/∂х2). Координатами вектора являются коэффициенты целевой функции L().