

6-1-воротников
.pdfСпектр АМ сигнала
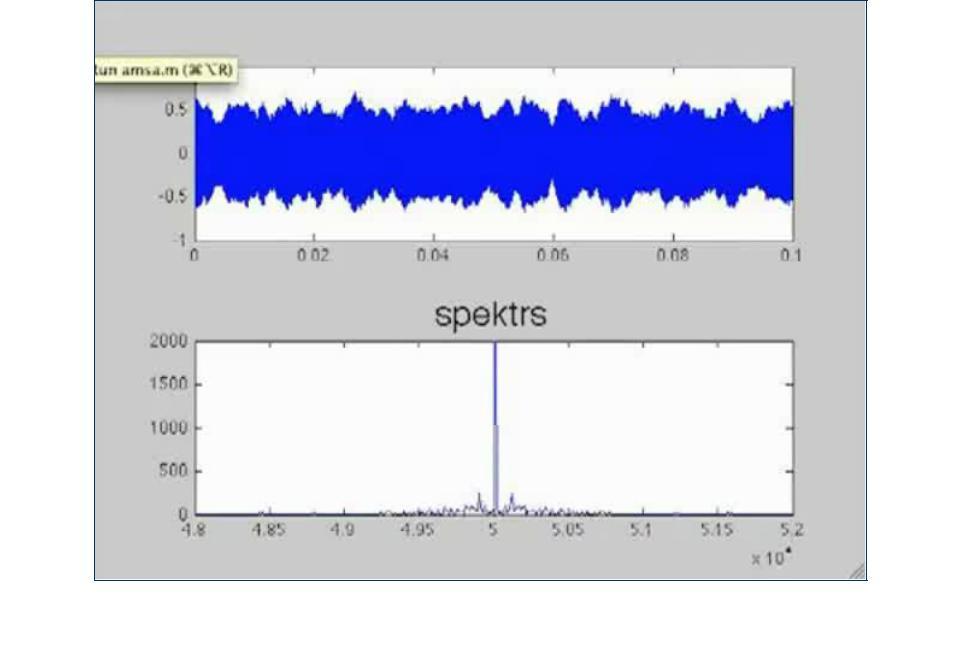
АМ сигнал состоит из трех гармонических сигналов: одного с несущей частотой и двух с частотами - м и + м. Соответствующие этим частотам сигналы называются спутниками.
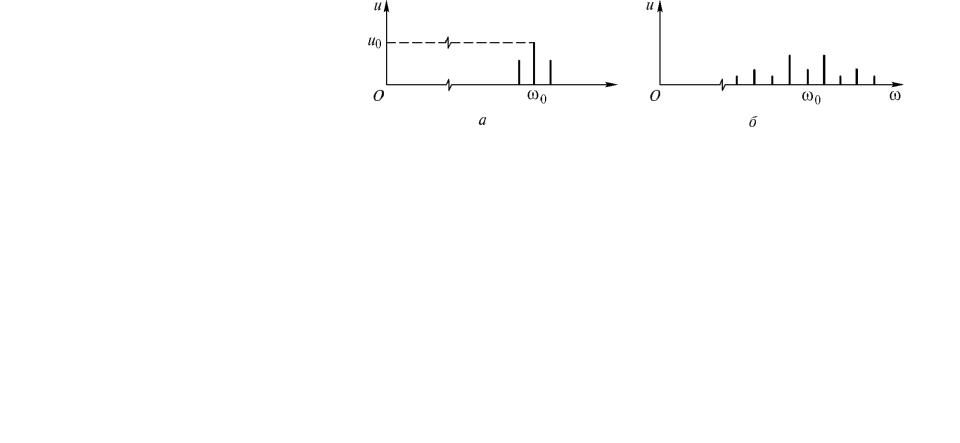
В общем случае модулирующий сигнал имеет более сложный спектр: спутник состоит из набора сигналов разных частот, образующих по обе стороны от несущей две полосы боковых частот. Если АМ линейная, то нижняя (левая) полоса боковых частот в точности повторяет форму модулирующего сигнала, а верхняя (правая) является ее зеркальным отражением (рис. 10, а).
а б
Рис. 10. Спектр линейного АМ сигнала (а), звуковой сигнал со спектроанализатора (б)
Амплитуда u0 несущего колебания не меняется, в то время как амплитуда спутника равна mu0/2. Амплитуды сигналов в спектре соотносятся как 1 : m/2 : m/2, поэтому соотношение
мощностей этих сигналов имеет вид 1 : (m/2)2 : (m/2)2. Следовательно, при m = 1 мощность
каждого спутника составляет лишь 25 % от мощности несущего колебания.
Достоинства АМ:
•простота решений;
•малая ширина спектра сигнала.
Недостатки АМ:
•значительные энергетические затраты;
•зависимость мощности полезного сигнала от глубины модуляции.
Локационные системы роботов |
Модуляция сигналов |
Спектр АМ сигнала
Локационные системы роботов |
Модуляция сигналов |
Частотная модуляция
В случае модуляции несущей частоты гармоническим сигналом, имеем:
(t) 0 cos мt.
Здесь представляет собой амплитуду отклонения несущей частоты от начальной 0, а
cos мt определяет форму модулирующего сигнала. Параметр называемый девиацией частоты, не зависит от частоты сигнала и соответствует глубине модуляции при АМ.
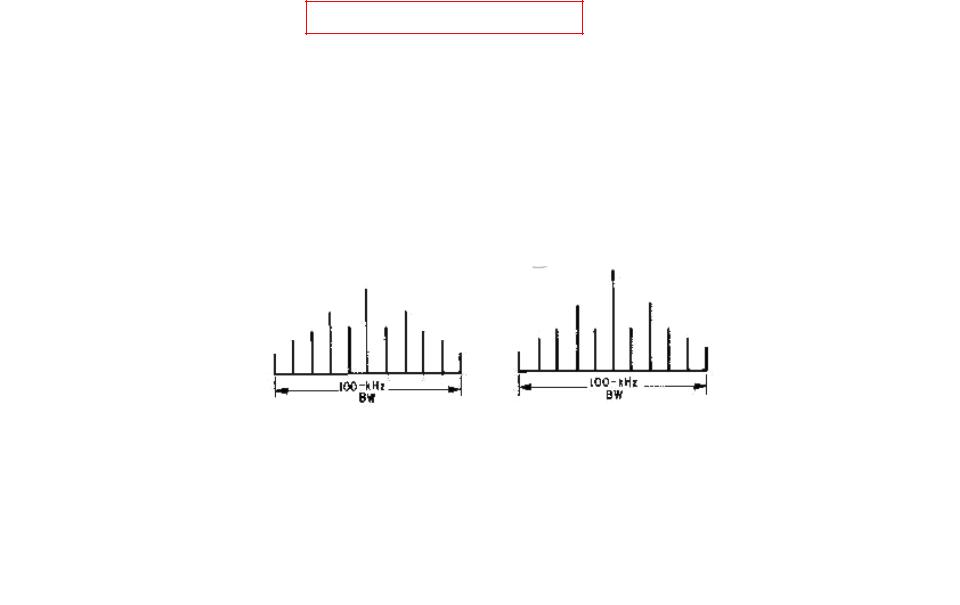
Ширина спектра частотно-модулированного сигнала определяется значением индекса
ЧМ: / м . При малых
2 м (рис. 11, а).
В этом случае ЧМ сигнал, как и АМ, состоит из колебания с несущей частотой
0 и двух спутников с
частотами 0- м и 0+ м и
описывается приближенным соотношением:
ширина спектра практически не зависит от его значения и равна
Рис. 11. Спектры частотно-модулированных сигналов при значении индекса частотной модуляции β, равном 0,1 (а) и 5,0 (б)
u(t) u0 (sin 0t sin мt cos 0t).
Однако, как правило, >>1, и следовательно, спектр ЧМ сигнала значительно шире, чем АМ
(рис. 11, б). Ширину спектра в этом случае определяют из приближенного выражения:
2 м (1+ ).
Достоинства ЧМ:
•высокая помехозащищенность;
•малые энергетические затраты.
Недостатки ЧМ:
•значительная ширина канала связи.
Локационные системы роботов |
Модуляция сигналов |
Частотная модуляция
Локационные системы роботов |
Модуляция сигналов |
СНЧ радиостанции ВМФ
Для обеспечения связи с подводными аппаратами и лодками используют принципы ЧМ и
приемо-передающие устройства, работающие в коротковолновом (береговые КВ системы ближней связи) и сверхдлинноволновом (сверхнизкочастотном – СНЧ) диапазонах.
Благодаря значительной длине СНЧ-радиоволны, достигающей 3000 км в воздушном пространстве, электромагнитное поле глубоко проникает в стенки волновода «Земля – ионосфера». Глубина
проникновения в морскую воду на частотах 50 – 100 Гц достигает 70 м.
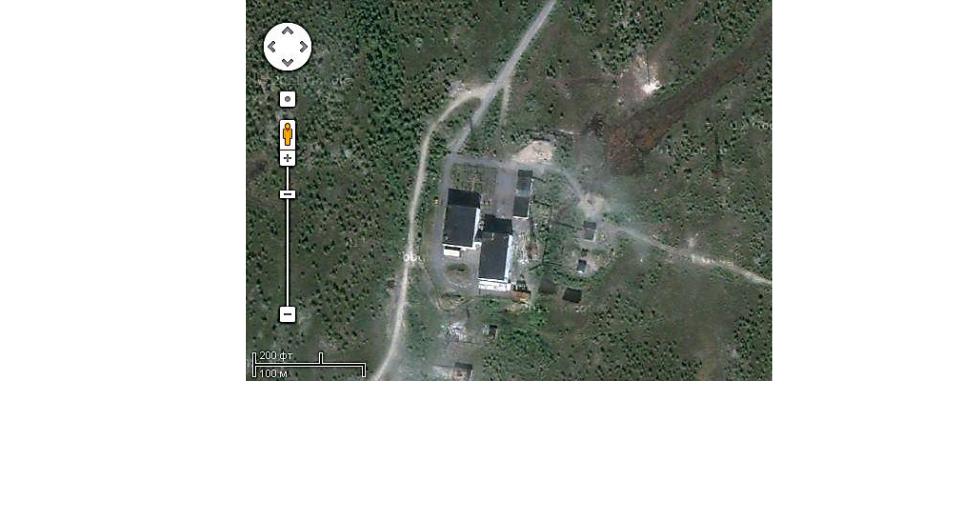
Рис. 12. Радиостанция «Зевс» (вид из космоса)
СНЧ радиостанция «Зевс», расположенная в Мурманской области, работает на частоте 82 Гц (длина волны 3656 км), в режиме ЧМ (MFSK -1/+1,3 Гц), суммарная мощность передатчиков составляет 20 – 30 МВт, ток 200 – 300 А, глубина контактных скважин 2 – 3 км (рис. 12).
Локационные системы роботов |
Основные положения |
Фазовая модуляция
Модулированный сигнал при фазовой модуляции колебания с несущей частотой 0 гармоническим сигналом sin мt имеет вид
u(t) u0 cos( 0t sin мt),
где — индекс ФМ, характеризующий максимальное отклонение фазы модулированного
сигнала от фазы исходного.
Несущая частота при ФМ, как и при ЧМ, непостоянна и определяется согласно выражению:
(t) 0 м cos мt.
Девиация частоты при ФМ зависит от частоты модулирующего сигнала = м. Если модулирующий сигнал uм гармонический, то спектры фазово- и ЧМ сигналов практически одинаковы (рис. 13). В противном случае законы изменения фазы и частоты сигнала оказываются различными. Для ФМ с небольшим индексом спектр боковых частот практически такой же, как и
при АМ.
а |
б |
Рис. 13. Спектры ЧМ (а) и ФМ (б) сигналов для несущей частоты 10 кГц.
Визуально сигналы при ФМ и ЧМ похожи, качественное различие существует лишь между АМ, с одной стороны, и ЧМ или ФМ — с другой. Для всякого закона изменения частоты всегда может быть указан эквивалентный закон изменения фазы. Существенно, что ширина спектра ФМ, также как ЧМ сигнала увеличивается с возрастанием глубины модуляции.
Локационные системы роботов |
Модуляция сигналов |
Импульсная модуляция
При импульсной модуляции (ИМ) переносчиком сигнала служит последовательность импульсов, каждый из которых обычно представляет собой цуг колебаний с высокой несущей частотой (рис. 14).
Целью ИМ является передача узкополосных аналоговых сигналов по аналоговым каналам связи.
Частота посылок импульсов, называемая частотой |
|
|
дискретизации fд, определяется спектром передаваемого |
|
|
сигнала и должна по крайней мере в 2—3 раза превышать |
|
|
верхнюю частоту спектра модулирующего сигнала. В этом |
Рис. 14. Волны: а – одиночная, |
|
случае возможна демодуляция сигнала. |
||
б – цуг, в - бесконечная |
||
|
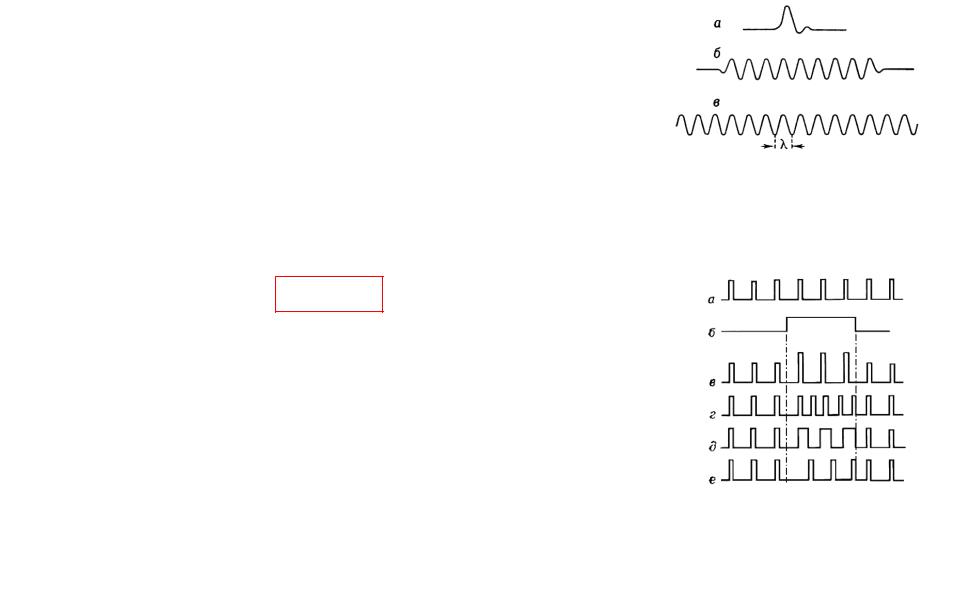
Кроме амплитуды, частоты и фазы (рис. 15) различают длительность (или ширину) импульсов
и их скважность q
q 1/( fд ).
Скважность может изменяться от 102—103 (у радиолокационных станций) до нескольких единиц (в многоканальной радиосвязи; для меандра скважность равна двум).
Чаще всего при ИМ применяются импульсы прямоугольной и
колоколообразной формы длительностью 10-9—10-5 сек.
Достоинства ИМ: |
|
||
• |
высокая помехозащищенность; |
Рис. 15. Примеры импульсной |
|
• |
многоканальность. |
||
модуляции: а — несущая; б — |
|||
Недостатки ИМ: |
|||
передаваемый сигнал; в — АИМ; |
|||
• значительное расширение канала связи. |
г — ЧИМ; д — ШИМ; е — ФИМ. |
||
|
|
|
|
|
Локационные системы роботов |
Модуляция сигналов |
|
Варианты импульсной модуляции
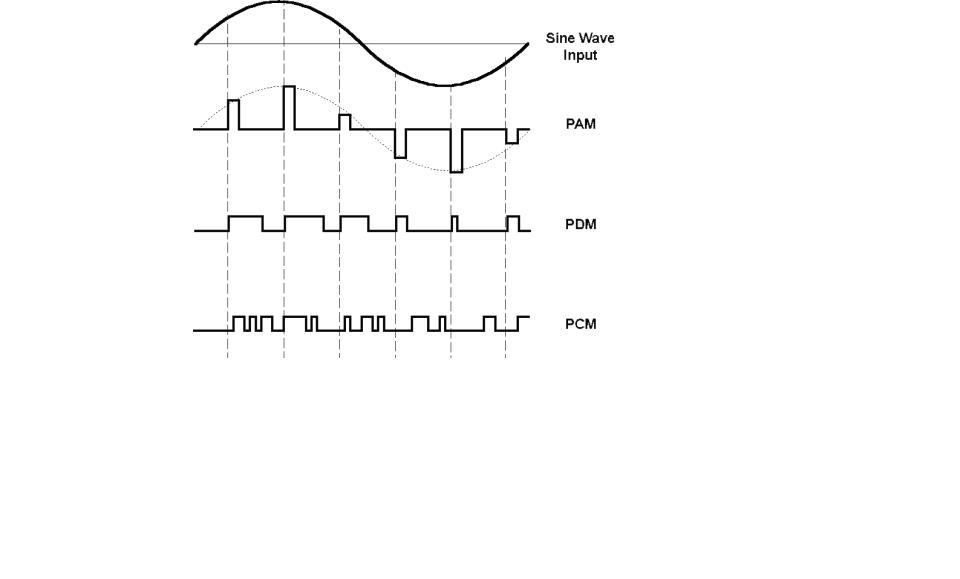
Наибольшее распространение получили амплитудно-импульсный (рис. 16, б), частотноимпульсный, широтно-импульсный (рис. 16, в) и фазово-импульсный, а также импульснокодовый (рис. 16, г) способы модуляции сигналов.
а
= АИМ
б
Pulse-density modulation = ШИМ
в
= ИКМ
г
Рис. 16. Варианты ИМ: а – исходный сигнал, б – АИМ-сигнал, в — ШИМ-сигнал, г — ИКМ-сигнал
Пример:
•для ШИМ PWM (10 бит, 10 МГц) на формирование сигнала с 50% уровнем потребуется 1024 внутренних такта (512 тактов на выходе будет «1», 512 – «0»). Частота повторения (несущая частота ШИМ) составит 10 кГц;
•для ШИМ PDM с теми же параметрами при 50% уровне на выходе будет чередование «1» и «0» с частотой 10 МГц, что значительно выше и упрощает фильтрацию;
•в целом, частота на выходе у PDM будет выше, чем у PWM при равной внутренней тактовой.
Локационные системы роботов |
Модуляция сигналов |
Осциллограммы модулированный сигналов
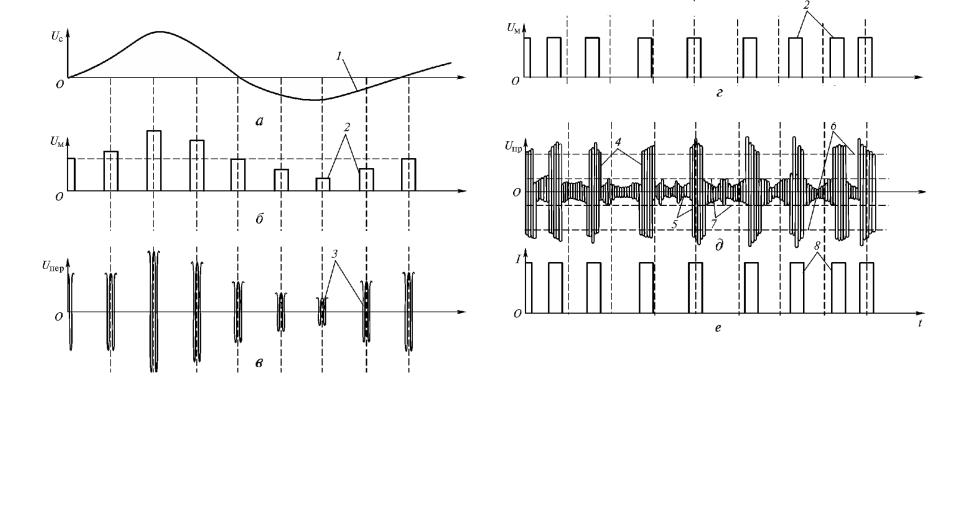
При прохождении модулированного сигнала по каналу связи его фронты несколько изменяются (рис. 17). На рис. 17, б — в показан принцип формирования сигналов при амплитудно-импульсной модуляции, а на рис. 17, г — е — фазо-импульсной. В первом случае, амплитуда импульсов, посылаемых через равные промежутки времени, изменяется пропорционально амплитуде передаваемого сигнала, а во втором — фаза этих импульсов изменяется пропорционально фазе передаваемого сигнала.
Рис. 17. Примеры амплитудно- (а—в) и фазово-импульсной (г—е) модуляции сигнала: 1 — модулирующий сигнал; 2 — модулированный сигнал; 3 — импульсы на выходе излучателя; 4 — импульсы на входе приемника; 5 — шум; 6, 7 — верхний и нижний пороги ограничения амплитуды сигнала; 8 — импульсы после ограничения и фильтрации
Локационные системы роботов |
Модуляция сигналов |
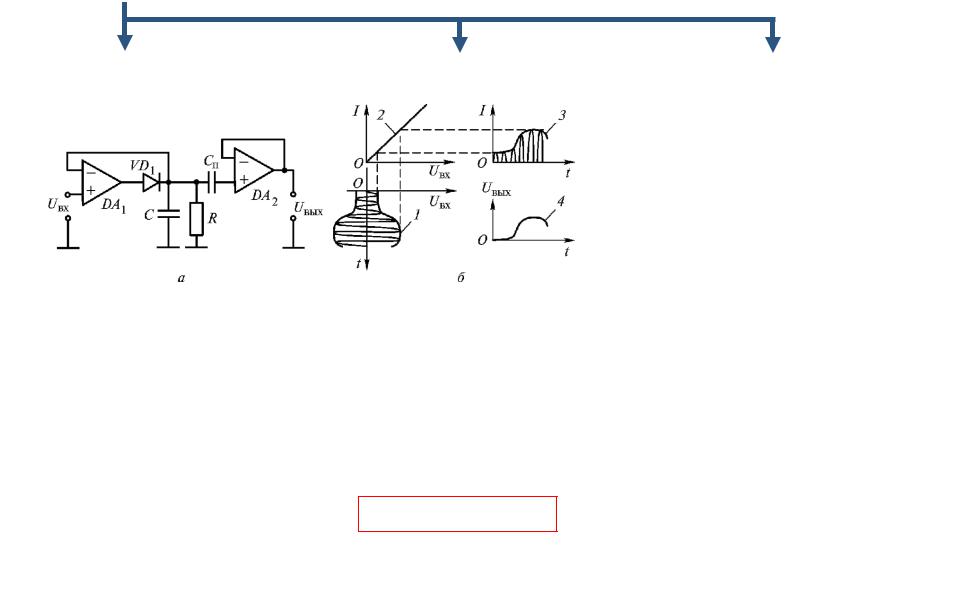
Схемы демодуляции
Для восстановления информации из модулированных сигналов применяют схемы демодуляции.
аналоговые демодуляторы
амплитудный детектор |
частотный дискриминатор |
фазовый детектор |
|
|
|
Основными элементами амплитудного |
|
! |
|
||
|
|
детектора (рис. 18, а) являются |
|
|
|
||
|
|
усилитель DA1, диод VD1 и фильтр |
|
|
|
низкой частоты, построенный на |
|
|
|
основе RC-контура. Эмиттерный |
|
|
|
повторитель DA2 предназначен для |
|
|
|
снижения |
выходного сопротивления |
|
|
схемы. |
|
Рис. 18. Схема амплитудного детектора (а) и графическая |
Подадим на вход усилителя DA1 АМ |
иллюстрация принципа выпрямления (б): 1 — входной сигнал; |
сигнал вида: |
2 — вольтамперная характеристика; 3 — сигнал после |
Uвх U0 (1 m cos мt) cos( t ), |
детектора; 4 — выходной сигнал |
где U0 — амплитуда напряжения модулирующего сигнала. Обозначая m = m cos мt и полагая |
|
= 0, получаем |
Uвх U0 (1 m ) cos t |
|
|
Если соотношение элементов фильтра удовлетворяет условию 10 / RC 1/ м , то на выходе |
|
схемы имеем |
Uвых SдU0 (1 m), |
|
|
где Sд — динамическая чувствительность схемы (0 < Sд < 1).
Локационные системы роботов |
Модуляция сигналов |