

Казанский национальный исследовательский технический университет им. А. Н. Туполева-КАИ
Военная кафедра
«УТВЕРЖДАЮ»
НАЧАЛЬНИК ВОЕННОЙ КАФЕДРЫ
полковник В.Шевченко
«____» ___________________ 201__г.
подполковник Желтков С.С.
Учебное пособие
на групповое занятие по дисциплине:
«Эксплуатация и ремонт радиоэлектронного оборудования самолетов,
вертолетов и авиационных ракет»
(ВУС 461300)
Тема № 7
«Радиотехническая система ближней навигации и посадки»
Занятие №4
«Работа самолётной аппаратуры радиотехнической системы
ближней навигации и посадки РСБН-6С в составе навигационного комплекса»
Групповое
Обсуждено на заседании цикла №6
Протокол№___от«___»__________201_г.
Казань – 2018
В учебном пособии рассматриваются назначение, состав, характеристика, принцип и режимы работы навигационного комплекса КН-23¸ а также работа самолётной аппаратуры радиотехнической системы ближней навигации и посадки РСБН-6С в режиме навигации и посадки.
Учебное пособие предназначено для студентов обучающихся по ВУС-461300. Учебное пособие может быть использовано преподавателями для подготовки к проведению занятий.
Тема № 7 Радиотехническая система ближней навигации и посадки.
Занятие №4 Работа самолётной аппаратуры радиотехнической системы ближней навигации и посадки РСБН-6С в составе навигационного комплекса.
Учебно-воспитательная цель занятия:
1. Развитие командно-методических навыков.
2. Изучение общих сведений о навигационном комплексе КН-23 и работу самолётной аппаратуры радиотехнической системы ближней навигации и посадки РСБН-6С в режиме навигации и посадки.
Время, отводимое на занятие: 4 учебных часа.
Место проведения занятия: класс технической подготовки.
Вид занятия: групповое.
Учебные вопросы:
Введение.
1. Назначение, состав, характеристика, принцип и режимы работы навигационного комплекса КН-23.
2. Работа самолётной аппаратуры радиотехнической системы ближней навигации и посадки РСБН-6С в режиме навигации и посадки.
Заключение.
Введение.
Радиотехнические системы навигации наряду с достоинствами (высокая стабильность измерения навигационных параметров независимо от времени полета, достаточно высокая точность измерения навигационных параметров) обладают существенными недостатками (ограниченная дальность действия, ограниченная пропускная способность, подверженность радиопомехам). Кроме радиотехнических систем и устройств на летательном аппарате (ЛА) используются средства навигации, основанные на измерении параметров движения (скорости, высоты полета, курса) аэрометрическими и электромеханическими (гироскопическими) приборами и системами. Последующее интегрирование составляющих скорости обеспечивает получение текущих координат ЛА. Такие автономные нерадиотехнические системы не подвержены помехам, имеют неограниченную дальность действия, однако ошибки в определении текущих координат с увеличением времени полета растут и могут достигать неприемлемых значений.
Объединение автономных нерадиотехнических и радиотехнических систем позволяет создать навигационные комплексы свободные от недостатков каждой из систем в отдельности. Навигационные параметры, измеренные этими комплексами, имеют высокую точность и стабильность независимо от времени полета. Комплекс обладает большой дальностью действия и высокой помехозащищенностью. В составе комплекса радиотехнические устройства (РТУ) обеспечивают получение наибольшего объёма информации, измерение параметров с наибольшей точностью, обработку информации в реальном масштабе времени, адаптацию датчиков к изменяющимся внешним условиям, но основным недостатком является подверженность радиопомехам. Комплексирование с нерадиотехническими устройствами (НРТУ) ослабляет отрицательное влияние этого фактора на эффективность комплекса. Комплексирование также даёт возможность выполнять полуавтоматически и автоматически задачи, решение которых отдельно взятыми устройствами не обеспечивается.
Навигационный комплекс (НК) - совокупность функционально связанных радиотехнических и нерадиотехнических устройств и систем, предназначенных для получения, совместной обработки, индикации информации (о параметрах, режимов и этапов полёта летательного аппарата) и для выработки сигналов управления самолётом, двигателем, элементами комплекса в целях обеспечения максимальной эффективности решения боевых задач.
1. Назначение, состав, характеристика, принцип и режимы работы навигационного комплекса кн-23.
Комплекс навигационный КН-23 (КН-23-1) предназначен для решения задач навигации и посадки, выдачи навигационной информации на индикаторные приборы и в систему автоматического управления (САУ) для выполнения автоматического, полуавтоматического или ручного управления самолётом.
Навигационный комплекс КН-23 в составе прицельно-навигационного комплекса обеспечивает решение основной задачи навигации в резервном режиме работы ПрНК-23 - при отказе ЦВМ 10-15-23, а при выполнении предпосадочного маневра и захода на посадку, как в основном, так и в резервном режимах.
Устанавливается на самолетах фронтовой авиации и служат для определения и выдачи потребителям (САУ и комплексной пилотажной системе KПС) навигационных и пилотажных параметров, необходимых для выполнения боевой задачи. На самолётах фронтовой авиации: МиГ-27М устанавливается ПрНК-23М(М1), МиГ-27К - ПрНК-23К, Су-17М4 - ПрНК-54.
Управление работой КН-23 обеспечивается с помощью щитка управления ЩУ, расположенного в кабине самолета.
Комплекс КН-23 обеспечивает решение следующих навигационных задач:
полёт по заданному маршруту с выходом самолёта в район заданных пунктов маршрута;
автоматическое счисление координат текущего местоположения самолета по данным бортовых автономных средств (от ИКВ или ИКВ-1 (системы инерциальной курсовертикали), ДИСС-7, ДВС-10, или СВС);
автоматическую коррекцию счисленных координат от системы РСБН-6С,
возврат самолёта на аэродрома посадки, выполнение предпосадочного маневра, заход на посадку до высоты 40-50 м, повторный заход на посадку.
определение и выдачу потребителям и на индикаторные приборы основных навигационных и пилотажных параметров:
и - истинного курса,
гмк - гиромагнитного курса,
зк - заданного курса,
КУР - курсового угла радиостанции,
![]() -
путевой скорости,
-
путевой скорости,
β - угла сноса,
γ - угла крена,
- угла тангажа,
![]() ,
,
![]() ;-
сигналов отклонения от равносигнальных
зoн
посадочного радиомаяка,
;-
сигналов отклонения от равносигнальных
зoн
посадочного радиомаяка,
ΔН - отклонения от заданной высоты на траектории снижения и предпосадочного маневра.
и разовых команд.
В состав комплекта КН-23 (КН-23-1) входят(см.рис.1):
бортовое оборудование радиотехнической системы ближней навигации РСБН-6С;
доплеровский измеритель путевой скорости и угла сноса ДИСС-7;
вычислитель В-144;
система инерциальной курсовертикали ИКВ (ИКВ-1);
датчик воздушной скорости ДВС-10;
датчик высоты ДВ-ЗОК;
рама амортизационная РА-5.
КН-23-1 по связям задействован на систему воздушных сигналов СВС-II-72-3.
Рис.1 Комплект навигационного комплекса КН-23:
1 – комплект РСБН-6С; 2 – комплект ИКВ-1; 3 – ДИСС-7;
4 – В144;. 5 – ДВС-10; 6 - ДВ-30К
1.2 Краткая характеристика аппаратуры из состава навигационного комплекса КН-23.
1.2.1 Основной составной частью комплекса КН-23 является изделие РСБН-6С. Аппаратура РСБН-6С предназначена для решения задач навигации и посадки и выдачи в САУ навигационной информации для выполнения автоматического, директорного или ручного управления самолётом.
В составе комплекса изделие РСБН 6С обеспечивает решение следующих задач:
счисление пути по данным ИКВ или ИКВ-1, ДИСС-7, ДВС-10 или СВС;
автоматическую коррекцию счисленных координат;
полёт по заданному маршруту;
возврат самолёта на запрограммированный аэродром посадки, оборудованный наземными радиотехническими средствами системы РСБН;
полёт на крейсерской высоте и пробивание облачности вниз по данным от ДВ-30К или СВС;
выполнение предпосадочного манёвра;
заход на посадку до высоты 40-50 м;
повторный заход на посадку;
возврат и посадку на незапрограммированный аэродром.
Радиотехническая система РСБН-6С при взаимодействии с системами, входящими в навигационно-пилотажный комплекс, обеспечивает на приборах индикацию следующих параметров:
а) на приборе ППД-2:
дальности до выбранной точки цели Дц (при дальности до цели более 500 км на приборе выпадает бленкер "х10", указывающий на необходимость умножения на 10 числа на счетчике прибора);
б) на приборе НПП:
истинного
текущего
курса
![]() ;
;
заданного
курса
![]() ;
;
курсового угла радиомаяка КУР;
азимута самолета θ;
сигналов бленкеров курса и глиссады;
сигналов
отклонения от равносигнальных зон курса
и глиссады
![]() и
и![]() ;
;
в) на приборе КПП:
отклонения от заданной высоты в режиме пробивания облачности ΔН;
г) на щитке управления аппаратуры РСБН-6С:
сигнала "Разрешение коррекции" (загорается лампа с зеленым фильтром КОРР.);
сигнала линейного упреждения разворота ЛУР (загорается лампа с желтым фильтром Д МЕНЬШЕ 40 км).
Перед полетом в с помощью блоков аппаратуры РСБН-6С должны быть запрограммированы следующие данные:
в БВН (БВН-01) - ортодромические координаты Xц, Yц четырёх аэродромов, оборудованных радиомаяками РСБН, и трех промежуточных пунктов маршрута ППМ, а также углы сходимости меридианов Δ для четырех аэродромов;
в
БВП - боковые
выносы радиомаяков Ζ
относительно
оси ВПП и курсы посадки
![]() для
четырех аэродромов;
для
четырех аэродромов;
в ЩПК - частотно-кодовые каналы связи (коды и кварцы) в режиме навигации и посадки для радиомаяков наземного оборудования РСБН-2Н(4Н) четырех запрограммированных аэродромов.
Для решения навигационных задач в аппаратуре РСБН-6С принята ортодромическая система координат (см. рис.2). Ось X направлена на север вдоль географического меридиана, проходящего через начало координат. Ось У направлена на восток по дуге большого круга и является условным экватором (ортодромическим экватором). В соответствии с принятой терминологией эта система координат называется ортодромической (условно географической). Угол сходимости Δ меридианов для аэродрома - это угол между географическим и ортодромическим меридианами в точке расположения аэродрома.

Рис. 2 Ортодромическая система координат.
Использование
ортодромической системы координат
позволяет осуществлять навигацию по
любым маршрутам в единой системе
координат на площади 6000x6000
![]() для
комплектации с блоком БВН и на площади
1200x1200
для
комплектации с блоком БВН и на площади
1200x1200
![]() для комплектации с блоком БВН-01.
для комплектации с блоком БВН-01.
Для определения ортодромических координат точек маршрута при полетах на расстояния до 500 км может быть использована прямоугольная сетка, нанесенная на прозрачный материал. Вид участка прямоугольной сетки для карты масштаба 1:1 000 000 представлен на рис. 3.

Рис.3 Участок прямоугольной сетки для карты масштаба 1:1 000000.
Ортодромические координаты точек маршрута и углы сходимости меридианов для аэродромов снимаются с карты или рассчитываются по формулам. Исходными данными для определения ортодромических координат являются географические координаты начала отсчета и точек маршрута. Начало отсчета выбирается из расчета наивыгоднейшего охвата системой координат района полетов. Целесообразно принять за начало отсчета координаты аэродрома базирования.
Поскольку аппаратура РСБН-6С не может обеспечить выход самолета непосредственно на ППМ, то для точного выхода на него при известном маршруте полета в БВН (БВН-01) вводятся координаты точки Xц, Yц отстоящей на 40 км дальше в направлении полета (см. рис. 4).

Рис.4 Определение ортодромических координат при выходе на ППМ.
Посадочные
курсы
![]() аэродромов
и боковые выносы Ζ
радиомаяков относительно оси ВПП
выбираются из сборников по радиотехническому
оборудованию или из регламентов.
аэродромов
и боковые выносы Ζ
радиомаяков относительно оси ВПП
выбираются из сборников по радиотехническому
оборудованию или из регламентов.
1.2.2.
Доплеровский измеритель путевой скорости
и угла сноса ДИСС-7 обеспечивает измерение
трех некомпланарных составляющих
путевой скорости самолёта с выдачей
этих данных в вычислитель В-144 (для
определения навигационных параметров)
в виде трёх последовательностей меандров,
частоты F1,
F2,
F3
пропорциональным проекциям путевой
скорости
![]() на направление лучей антенны.
на направление лучей антенны.
1.2.3.
Вычислитель В-144 предназначен для
сопряжения доплеровского
измерителя путевой скорости и угла
сноса ДИСС-7 с блоками БВН-01 и БСАД-М
изделия РСБН-6С. Вычислитель
производит вычисление составляющих
путевой скорости
![]() и
и
![]() ,
а также модуля путевой скорости /
,
а также модуля путевой скорости /![]() /
и угла сноса β
по трём доплеровским частотам F1,
F2,
F3
и напряжению UXOП
поступающего с доплеровского измерителя
ДИСС-7. Вычислитель
В-144 выдает в изделие РСБН-6С напряжения,
пропорциональные проекциям путевой
скорости на продольную и поперечную
оси самолета
/
и угла сноса β
по трём доплеровским частотам F1,
F2,
F3
и напряжению UXOП
поступающего с доплеровского измерителя
ДИСС-7. Вычислитель
В-144 выдает в изделие РСБН-6С напряжения,
пропорциональные проекциям путевой
скорости на продольную и поперечную
оси самолета
![]() и
и
![]() (см. рис. 5) для счисления ортодромических
координат, а параметры /
(см. рис. 5) для счисления ортодромических
координат, а параметры /![]() /
и угла сноса β
выдаёт потребителям путевой скорости
и угла сноса.
/
и угла сноса β
выдаёт потребителям путевой скорости
и угла сноса.

Рис. 5. Составляющие путевой скорости в горизонтальной плоскости
1.2.4.
Инерциальная курсовертикаль ИКВ
предназначена для определения и выдачи
сигналов, пропорциональных горизонтальным
проекциям абсолютной линейной скорости
самолета Vξ
и
Vη
в не вращающейся прямоугольной системе
координат O η ξ τ
cвязанной
со свободной в азимуте гироплатформой
инерциальной системы курсовертикали,
ортодромического курса
![]() ,
углов крена и тангажа
,
углов крена и тангажа![]() и вертикальной составляющей абсолютного
ускорения
и вертикальной составляющей абсолютного
ускорения![]() .
.
ИКВ обеспечивает определение и выдачу в аппаратуру РСБН-6С следующей навигационной информации, для счисления ортодромических и полярных координат самолёта:
составляющих абсолютной линейной скорости самолета Vx и Vy по двум горизонтальным осям гиростабилизированной платформы (см. рис. 6),
углов
крена и тангажа самолёта![]() ,
,
ортодромического
курса
![]() .
.
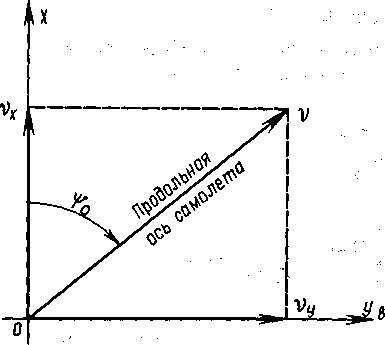
Рис. 6. Составляющие абсолютной скорости самолета
Кроме
того углы крена и тангажа
![]() ,
ортодромического курса
,
ортодромического курса
![]() ,
выдаются на индикаторные приборы и
потребителям в САУ и КПС.
,
выдаются на индикаторные приборы и
потребителям в САУ и КПС.
В состав комплекта ИКВ (ИКВ-1) входят: курсовертикаль КВ-1, блок усилителей гиродатчиков БУГ-14, блок коррекции БК-20 (серия 1), индукционный датчик ИД-6 (серия 1), коррекционный механизм КМ-2 серия1, пульт управления ПУ-38 (пульт начальных данных ПНД-1).
Гиростабилизированная платформа представляет собой трехосный гиростабилизатор, выполненный на трех двухстепенных гироскопах: курсовой, креновый и тангажный. При начальной выставке платформы в горизонте и азимуте ось X платформы ориентируется на север.
Принцип
действия системы ИКВ заключается в
измерении составляющих абсолютного
ускорения с помощью двух акселерометров,
установленных на гиростабилизированной
платформе, и интегральной коррекции
кренового и тангажного гироскопов с
целью определения и выдачи углов
отклонения от плоскости горизонта
![]() ,
а также для определения и выдачи
ортодромического курса
,
а также для определения и выдачи
ортодромического курса
![]() при
коррекции курсового гироскопа посредством
сигнала, несущего информацию о постоянной
составляющей собственного дрейфа
гироплатформы и вертикальной составляющей
угловой скорости вращения Земли.
при
коррекции курсового гироскопа посредством
сигнала, несущего информацию о постоянной
составляющей собственного дрейфа
гироплатформы и вертикальной составляющей
угловой скорости вращения Земли.
1.2.5. Датчиками скорости и высоты могут быть либо датчики системы СВС в КН-23 1, либо датчики ДВС-10, ДВ-30К и ЗДВ в КН-23.
Датчик воздушной скорости ДВС-10 предназначен для измерения и выдачи электрических сигналов, пропорциональных истинной воздушной скорости самолёта VИ в блоки БСАД-М и БИО-01 изделия РСБН-6С для счисления ортодромических и полярных и координат.
Принцип работы датчика ДВС-10 основан на измерении динамического напора, статического давления, температуры воздушного потока, воспринимаемых приемником воздушного давления ПВД и приемником температуры П-5 с последующим преобразованием этих величин в напряжение, пропорциональное истинной воздушной скорости. Диапазон измеряемых скоростей 500...2500 км/ч.
1.2.6. Датчик высоты ДВ-30К предназначен для определения барометрической (относительной) высоты полета самолета и выдачи электрического сигнала, пропорционального высоте полета в РСБН-6С.
Принцип действия датчика состоит в измерении статического давления воздуха, окружающего самолет, барометрическим методом. Барометрический метод измерения высоты основан на использовании закона падения давления воздуха с увеличением высоты. Датчик измеряет высоту в диапазоне от 0 до 30 км.
Задатчик барометрического давления ЗДВ предназначен для ввода в датчик высоты поправок на изменение давления на уровне земли. Диапазон вводимых поправок на изменение давления составляет 85х103 ...105х103 Па.
1.3. Функциональное построение, связи, принцип и режимы работы комплекса.
Функционально в состав навигационного комплекса входят:
1) Датчики навигационной информации. Радиотехнические: ДИСС-7, РСБН-6С, РСДН А-711 и нерадиотехнические: ИКВ, ДВС-10, ДВ-30 и ЗДВ (или СВС). При этом датчиками скорости являются: ДВС-10 или СВС, ДИСС-7, ИКВ, а датчиками направления движения: ИКВ или СКВ.
2) Специализированные вычислители: В-144, блоки БВН (БВН-01), БВП аппаратуры РСБН-6С;
3) Органы управления и индикации: ЩУ, ШПК, ППД аппаратуры РСБН-6С; НПП, КПП системы САУ.
Функциональные связи навигационного комплекса КН-23 см. рис.7.
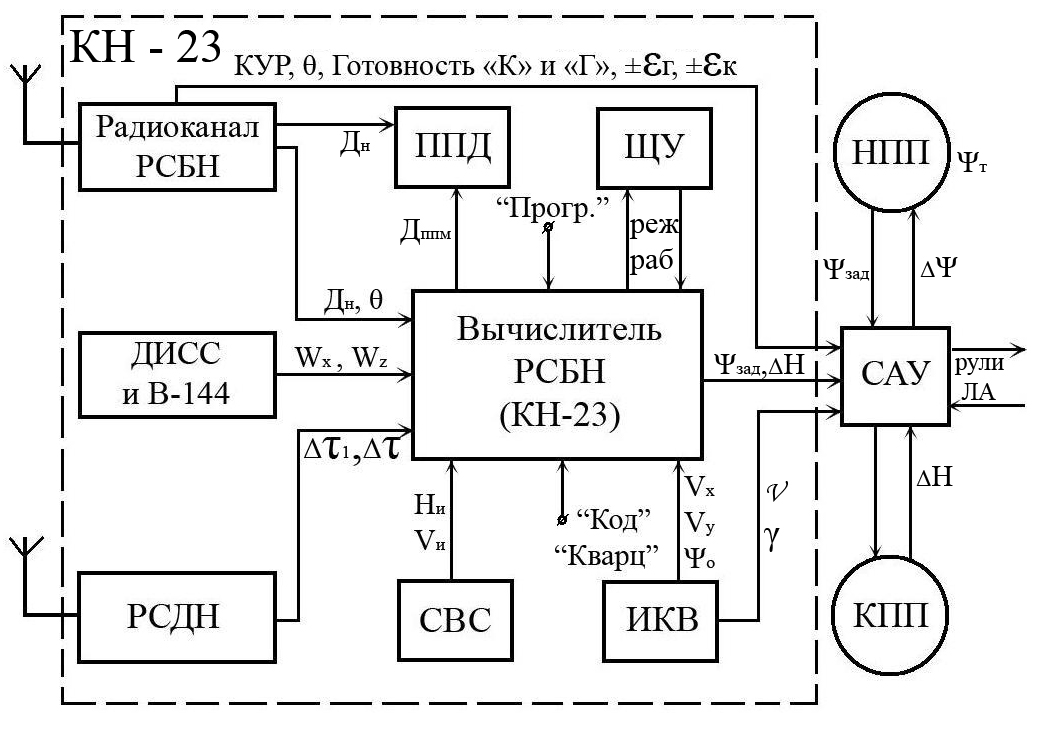
Рис.7 Структурная схема навигационного комплекса КН-23.
Навигационный комплекс совместно с САУ образует навигационно-пилотажный комплекс, который служит для определения местоположения самолета и формирования сигналов траекторного управления самолетом.
Вычисление местоположения самолета сводится либо к счислению пути, либо к определению местоположения путем измерения азимута и дальности, а счисление пути сводится к измерению пройденного расстояния по координатным осям ортодромической системы координат на основе данных о скорости, и направлении полета.
Принцип работы навигационного комплекса КН-23 основан на счислении ортодромических координат XТ, YТ текущего местоположения ЛА:
по составляющим Vη Vξ абсолютной линейной скорости ЛА и ортодромическому курсу 0 выдаваемых ИКВ;
для повышения точности счисления ортодромических координат осуществляется коррекция скорости, выдаваемой ИКВ по данным составляющих Wхc и Wzc путевой скорости, вычисленных В-144 по доплеровским частотам F1, F2, и F3 и поправке U хоп измерителя ДИСС–7;
при отказе ИКВ (по выдаче абсолютной линейной скорости, т.е. при переходе ее в режим радиальной коррекции) и одновременно при отказе ДИСС-7 счисление координат производится по воздушной скорости Vист от СВС или ДВС - 10.
В блок БСАД-М аппаратуры РСБН-6С поступают:
составляющие Vx и Vy абсолютной скорости от системы ИКВ,
составляющие Wхc и Wzc путевой скорости от системы ДИСС-7 с В-144,
истинная воздушная скорость Vист от системы СВС или ДВС-10.
Составляющие
путевой скорости Wхc
и Wz
и
истинная
воздушная скорость Vист
в
поступают в блок БВН-01 для преобразования
в составляющие скорости ортодромической
системы координат путём разворота на
угол
![]() .
(см.рис. ) и возвращаются обратно в блок
БСАД-М, где и происходит выбор оптимальной
по точности составляющей скорости от
разных систем (ДИСС-7, ИКВ, СВС или ДВС-10).
.
(см.рис. ) и возвращаются обратно в блок
БСАД-М, где и происходит выбор оптимальной
по точности составляющей скорости от
разных систем (ДИСС-7, ИКВ, СВС или ДВС-10).
Оптимальные по точности счисления составляющих скорости поступают в блоке БВН-01 аппаратуры РСБН-6С, где путём интегрирования производится счисление текущих ортодромических координат самолёта по закону:
![]() ,
,
![]() ,
где:
,
где:
Xо и Yo – ортодромические координаты аэродрома вылета,
Vx и Vy – составляющие скорости по оси X и Y.
1.4. Режимы работы.
КН-23, в зависимости от используемого датчика скорости (ДИСС-7, ИKB, ДВС -10), для счисления координат имеет следующие режимы работы:
режим инерциального счисления координат;
инерциально - доплеровский;
режим счисления от ДВС-10;
режим радиокоррекции.
Выбор режимов работы навигационного комплекса по точности счисления координат производится автоматически в блоке БСАД-М аппаратуры РСБН-6С. В зависимости от исправности систем ДИСС-7, ИКВ и положения в пространстве летательного аппарата происходит выбор оптимальной по точности составляющей скорости систем ДИСС-7, ИКВ, СВС или ДВС-10 с выдачей этих составляющих в блок БВН-01, где и производится счисление текущих координат самолёта.
Координаты самолета счисляются в вычислителе аппаратуры РСБН-6С по данным автономных систем и корректируются точными радиотехническими данными, которые измеряются радиотехнической частью аппаратуры РСБН-6С. Коррекция осуществляется при полете в зоне действия сигналов запрограммированного радиомаяка для уменьшения накопленных погрешностей по счисленным в автономном режиме координатам. При наличии радиокоррекции в РСБН-6С определяется азимут θ и курсовой угол радиомаяка КУР. Использование в аппаратуре двух видов определения координат (радийного и автономного) увеличивает помехозащищенность аппаратуры и устойчивость выходных сигналов управления.