

3.8. Регулирование скорости дпт независимого возбуждения в схеме с шунтированием якоря
Для регулирования скорости ДПТ независимого возбуждения применяется схема с шунтированием якоря, показанная на рис. 3.30. Эта схема позволяет с помощью двух добавочных резисторов–Rш,включаемого параллельно якорю, иRп,включаемого последовательно с якорем, получать
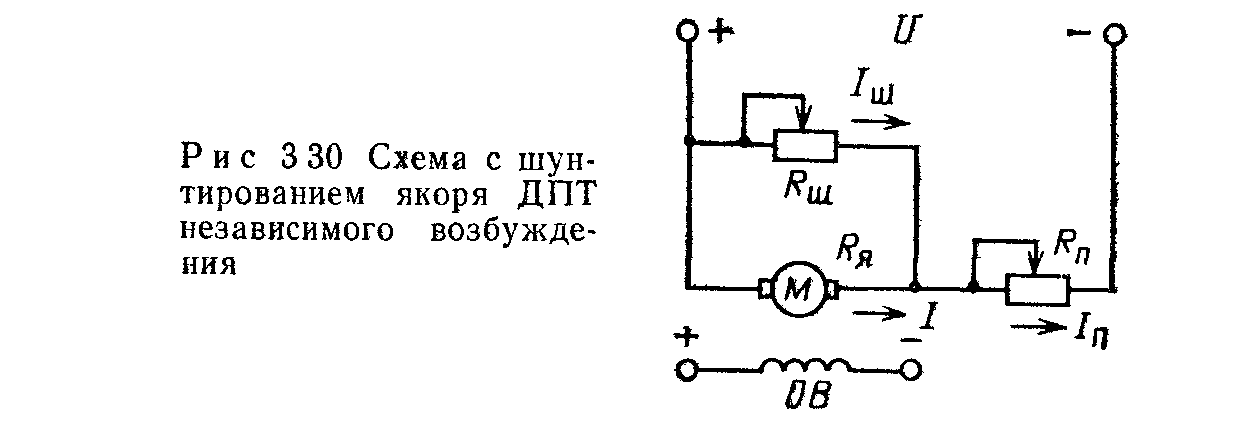
сравнительно жесткие характеристики в области малых скоростей ДПТ. Такие характеристики требуются, например, для электроприводов подъемных кранов и лифтов.
Уравнения характеристик ДПТ в схеме рис. 3.30 могут быть получены на основании выражений для ЭДС (3.2) и момента (3.3) ДПТ и следующих соотношений:
![]() (3.57)
(3.57)
![]() (3.58)
(3.58)
![]() (3.59)
(3.59)
Заменяя в (3.57) и (3.58) ток Iпна его выражение из (3.59), а затем исключая из полученных двух уравненийIш, получаем следующие выражения соответственно для электромеханической и механической характеристик:
![]() (3.60)
(3.60)
![]() (3.61)
(3.61)
где
![]()
Из (3.60) и (3.61) видно, что в схеме с шунтированием якоря снижается скорость идеального холостого хода и падает жесткость характеристик по сравнению с основной схемой включения ДПТ. Это объясняется тем, что в схеме рис 3.30 напряжение ДПТ меньше напряжения источника питания, а в якорной цепи находится добавочный резистор Rп. По этой причине способ регулирования скорости в схеме с шунтированием якоря часто называют комбинированным, так как он сочетает в себе регулирование изменением напряжения и реостатное регулирование.
Семейство искусственных характеристик ДПТ в схеме рис. 3.30 при постоянном Rши регулируемомRпприведено на рис. 3.31.

Общая для данного RшточкаA1пересечения всех характеристик соответствует режиму работы ДПТ, когда он не потребляет ток из сети, в силу чего резисторRпне оказывает влияния на характеристики ДПТ. В этой точке ЭДС ДПТ уравновешивает напряжение сети и внутреннее падение напряжения в якоре, т. е.
![]()
Двигатель работает в режиме динамического торможения с током I1=U/Rш1. При измененииRш,например при его увеличении, общей точкой становится точкаA2, также располагающаяся на естественной характеристике.
Семейство искусственных характеристик ДПТ при постоянном Rпи регулируемомRшприведено на рис. 3.32. Пересечение характеристик происходит в точкеВ1,которая является общей точкой для всех искусственных характеристик при данномRп.В точкеB1ЭДС ДПТ, изменив свой знак, компенсирует внутреннее падение напряжения в якоре, вследствие чего напряжение на якоре и, следовательно, наRшравно нулю, ток через резисторRш.не проходит, а ток через якорь определяется какI1=U/Rп1.При измененииRп,например при его увеличении, общей точкой характеристик становится точкаВ2,координата тока для которой определяется соотношениемI2=U/Rп2.
Рассмотренный способ регулирования скорости по своим характеристикам и показателям занимает промежуточное положение между способами, связанными с изменением напряжения на якоре и сопротивлением в цепи якоря. Диапазон регулирования скорости лежит в пределах 5 – 6, плавность регулирования определяется плавностью изменения сопротивления RшиRп. Регулирование скорости осуществляется вниз от основной при постоянном моменте нагрузки, жесткость получаемых искусственных характеристик относительно высокая в области малых скоростей.
Экономичность этого способа регулирования невысока из-за значительных потерь мощности в якорной цепи. По этой причине способ используется для регулирования скорости ДПТ небольшой мощности при кратковременной работе на пониженных скоростях.