

3.11. Автоматическое управление дпт независимого возбуждения при пуске, реверсе и торможении при питании его от сети
Пуск, реверс и торможение ДПТ при питании его от сети обычно осуществляются с помощью релейно-контакторных схем управления. При их автоматизации используются принципы времени, скорости, тока и пути Существо этих принципов рассмотрим на примере пуска ДПТ по пусковой диаграмме рис, 3.8.
Порядок пуска ДПТ по этой диаграмме предусматривает закорачивание с помощью ключей (контактов) К1иК2в требуемый момент переходного процесса ступеней пусковых резисторовRд1иRд2. Этим моментам переходного процесса соответствуют определенные скорость и ток ДПТ, а также время, прошедшее с начала переходного процесса. Так, например, резисторRд1должен быть закорочен ключомК1,когда ток двигателя станет равнымI2,aскорость –1. Время, которое прошло от начала пуска до этого момента переходного процесса, определяется в соответствии с (1.41) при подстановке в неенач=0;i=1;уст=0. Таким образом, автоматизацию пуска ДПТ по рассматриваемой пусковой диаграмме можно выполнить, осуществив с помощью соответствующих датчиков контроль за скоростью, током ДПТ или временем переходного процесса. В первом случае говорят о построении схемы по принципу скорости, во втором – по принципу тока, а в третьем – по принципу времени.
Некоторые схемы управления строятся по принципу пути, когда с помощью конечных или путевых выключателей осуществляется контроль за углом поворота вала ДПТ. Кроме того, для автоматизации работы электроприводов может быть использован принцип момента, однако он не нашел практического применения из-за отсутствия простых и надежных датчиков момента.
Реализация указанных принципов осуществляется с помощью соответствующих датчиков, от которых в схему управления поступает информация о текущих значениях скорости, тока или времени. Рассмотрим основные виды датчиков, применяемых в схемах управления ДПТ.
Датчики времени. Наиболее распространенным видом датчика времени является реле времени. По принципу действия реле времени разделяются на механические, электромагнитные, электронные, электромеханические и т.д. Механические реле времени обычно пристраиваются к подвижной части контактора или магнитного пускателя и срабатывают с выдержкой времени после их включения. Они обеспечивают выдержку времени от 0,5 до 5 с.
В электромагнитных реле выдержка времени достигается тем, что при отключении катушки реле или замыкании ее накоротко магнитный поток в магнитопроводе спадает медленно, вследствие чего якорь реле остается в течение определенного времени в притянутом положении. Для замедления процесса спадания потока используются медная гильза, надеваемая на сердечник реле, или короткозамкнутый виток Электромагнитные реле обеспечивают выдержку времени лишь при отключении реле, в то время как их включение происходит практически мгновенно. Обеспечиваемая ими выдержка времени колеблется от десятых долей секунды до 5–6 с и более.
Электронные и полупроводниковые реле времени могут обеспечить выдержку времени до 1 мин, которая достигается за счет процесса заряда или разряда конденсаторов, включаемых в цепи управления электронных ламп или транзисторов. На выходе таких реле времени стоят обычные электромагнитные реле, контакты которых используются в схемах управления.
Электромеханическое реле времени включает в себя низкоскоростной электродвигатель и редуктор, имеющий большое передаточное отношение. Вследствие этого скорость выходного вала, на котором располагается контактная система реле, очень маленькая и замыкание (размыкание) контактов происходит через значительный промежуток времени после подачи напряжения на двигатель. Эти реле времени обеспечивают выдержки времени более 1 мин.
Датчики скорости. Широкое распространение в качестве датчиков скорости получили тахогенераторы, использование которых уже рассматривалось применительно к замкнутым системам. В разомкнутых системах управления пуском, реверсом и торможением в качестве датчика скорости чаще всего используется сам ДПТ, так как наводимая в якоре ЭДС пропорциональна скорости ДПТ. В этом случае говорят, что схема построена по принципу ЭДС, который по существу является разновидностью принципа скорости.
В некоторых схемах в качестве датчиков скорости используются специальные электромеханические реле, называемые обычно реле контроля скорости (РКС). Они устанавливаются на валу ДПТ и, как правило, дают информацию в следующем виде: скорость ДПТ равна нулю или не равна нулю.
Датчики тока Простейшим датчиком тока ДПТ является шунт, включаемый в цепь якоря. Иногда вместо шунта используются обмотки дополнительных полюсов ДПТ. Еще одним типом датчика является специальное реле тока, обмотка которого включается непосредственно в цепь якоря ДПТ. Реле срабатывает при определенном токе, который предварительно может быть установлен.
Датчики пути. В качестве датчиков пути используются путевые и конечные выключатели.
а) Управление пуском ДПТ
Для управления пуском чаще всего используется управление в функции времени, реже – в функции тока и ЭДС.
На рис. 3.40, априведена схема типового узла автоматического пуска двигателя в одну ступень в функции времени. Схема управления содержит кнопки управленияSB1 (пути) иSB2(останов, стоп ДПТ), линейный контакторКМ1обеспечивающий подключение ДПТ к сети, и контактор стопоренияКМ2для выключения (закорачивания) пускового резистораRд. В качестве датчика времени в схеме использовано электромагнитное релеКТ.
Работа схемы при пуске происходит следующим образом. При подаче напряжения на схему происходит возбуждение ДПТ и срабатывает реле КТ,размыкая свой размыкающий контакт в цепи контактораКМ2. Схема подготовлена к пуску.
Пуск ДПТ осуществляется нажатием кнопки SB1,в результате чего получает питание контакторКМ1. Включившись, он своим главным контактом подключает ДПТ к напряжению сети. Двигатель начинает разбег с резисторомRд. в цепи якоря.

Одновременно замыкающий вспомогательный контакт контактора КМ1шунтирует кнопкуSB1,и она может быть отпущена оператором, а размыкающий вспомогательный контактКМ1разрывает цепь питания реле времениКТ. Реле времени, потеряв питание, начинает отсчет выдержки времениtр,в, соответствующей времени работы ДПТ на реостатной характеристике. Через интервал времениtр,вразмыкающий контактКТзамкнется в цепи контактораКМ2,последний включится и своим главным контактом закоротит пусковой резисторRдв цепи якоря. Двигатель выйдет на свою естественную характеристику, по которой и продолжит свой разбег до точки установившегося режима.
На рис. 3.40, бпоказаны графики изменения скорости, тока и момента ДПТ при пуске, построенные без учета электромагнитной инерции обмоток якоря и соответствующие статическим характеристикам ДПТ рис. 3.5. Переходный процесс имеет два участка: первый участок соответствует работе ДПТ на реостатной, а второй – на естественной характеристиках. Изменение скорости, тока и момента от времени происходит по экспоненте и соответствует формулам (1.37) и (1.38).
Схема типового узла пуска ДПТ в две ступени по принципу ЭДС приведена на рис. 3.41, а. В этой схеме катушки контакторов ускоренияКМ1иКМ2включены непосредственно на якорь ДПТ и с помощью резисторов управленияRy1иRy2настроены на срабатывание при определенной скорости.
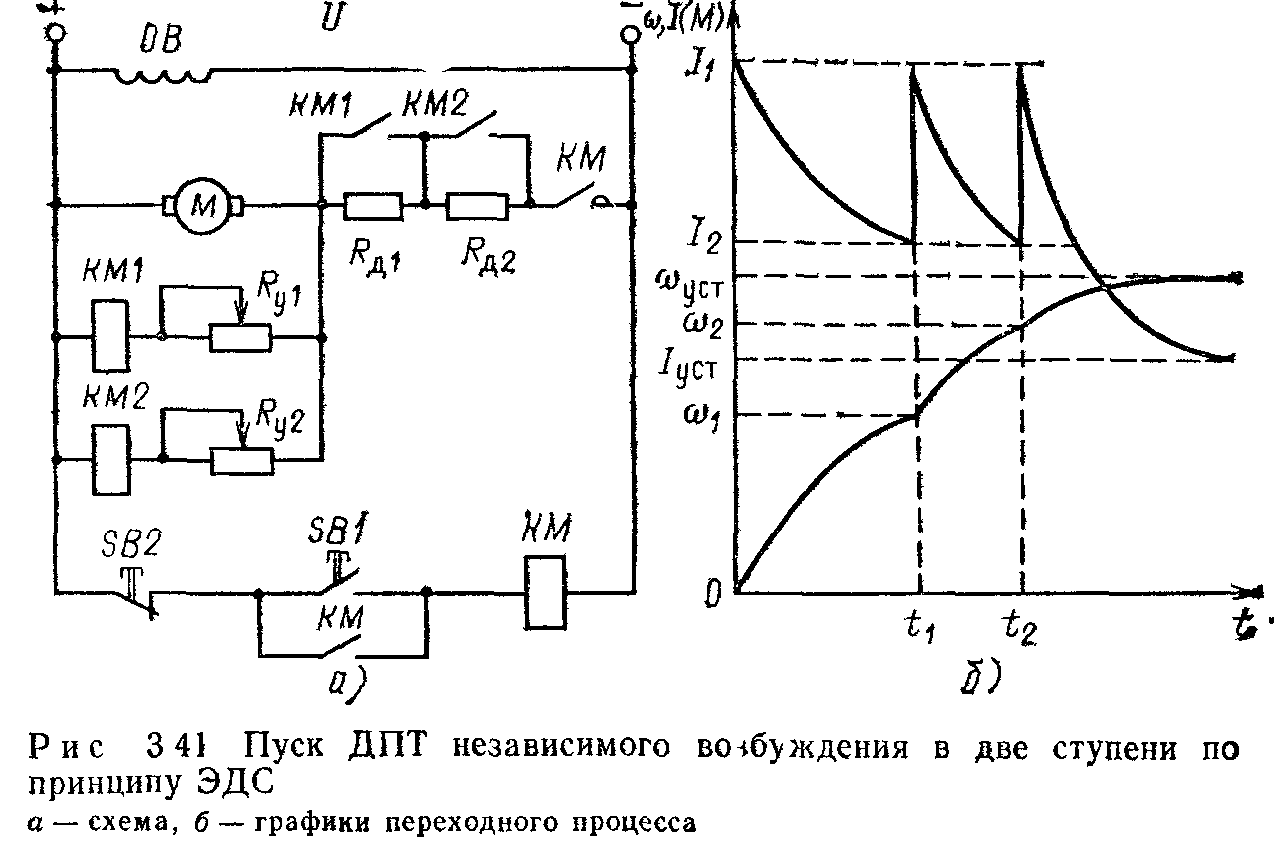
Пуск двигателя осуществляется нажатием кнопки SB1, что приводит к срабатыванию линейного контактораКМи подключению ДПТ к сети. Двигатель начинает разбег с включенными резисторами в цепи якоряRд1+Rд2. По мере разбега ДПТ растет его ЭДС и соответственно растет напряжение на катушках контакторовКМ1иКМ2.При скорости1срабатывает контакторКМ1,закорачивая своим контактом первую ступень пускового резистораRд1. При скорости2срабатывает контакторКМ2,закорачивая вторую ступень пускового резистораRд2. Двигатель выходит на естественную характеристику и заканчивает свой разбег в точке установившегося режима.
Кривые переходного процесса при пуске, соответствующие статическим характеристикам ДПТ рис. 3.8, показаны на рис. 3.41, б. Момент времениt1соответствует срабатыванию контактораКМ1иt2– контактораКМ2.
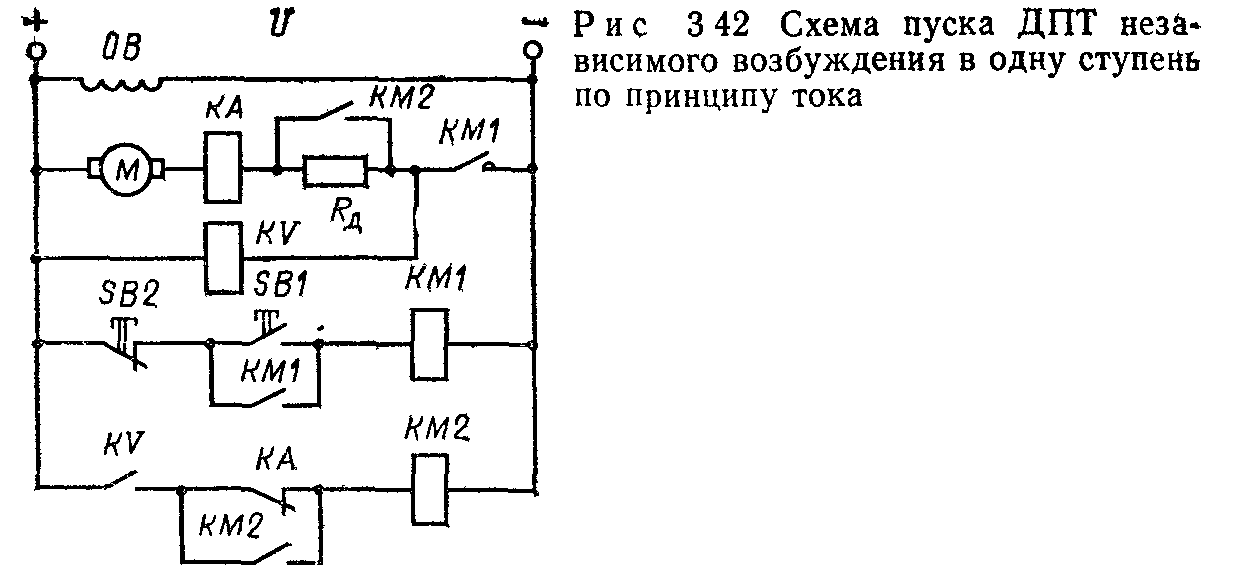
Схема типового узла пуска двигателя в одну ступень в функции тока приведена на рис. 3.42. Для реализации принципа тока в схеме используется реле тока КА,катушка которого включена в цепь якоря ДПТ, а размыкающий контакт – в цепь питания контактора ускоренияКМ2.Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал токуI2. В схеме используется также дополнительное блокировочное релеKV,которое выбирается таким образом, чтобы его собственное время срабатывания превосходило время срабатывания релеКА.
Работа схемы при пуске происходит следующим образом. Нажатие на кнопку SB1приводит к срабатыванию контактораКМ1и подключению ДПТ к сети, в результате чего он начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактораКМ1вызовет срабатывание реле токаКА,которое разомкнет свой размыкающий контакт в цепи контактораКМ2.Через некоторое время после этого срабатываетKVи замыкает свой замыкающий контакт в цепи контактораКМ2,подготавливая его к включению.
По мере разбега ДПТ ток якоря снижается до значения I2. При этом отключается реле тока и замыкает свой размыкающий контакт в цепи контактораКМ2. Последний срабатывает, его главный контакт закорачивает пусковой резисторRдв цепи якоря, а вспомогательный контакт шунтирует контакт реле токаКА.Поэтому вторичное включение реле токаКАпосле закорачиванияRдне вызовет отключения контактораКАи ДПТ продолжает разбег по своей естественной характеристике.
б) Управление торможением и реверсом ДПТ
Схема управления пуском двигателя и динамическим торможением по принципу времени приведена на рис. 3.43. Для осуществления торможения в схеме предусмотрен резистор динамического торможения Rд2, включение и отключение которого осуществляется контактором торможенияКМ2. Для реализации принципа, времени используется электромагнитное реле времениКТ,размыкающий контакт которого включен в цепь контактора торможенияKМ2.
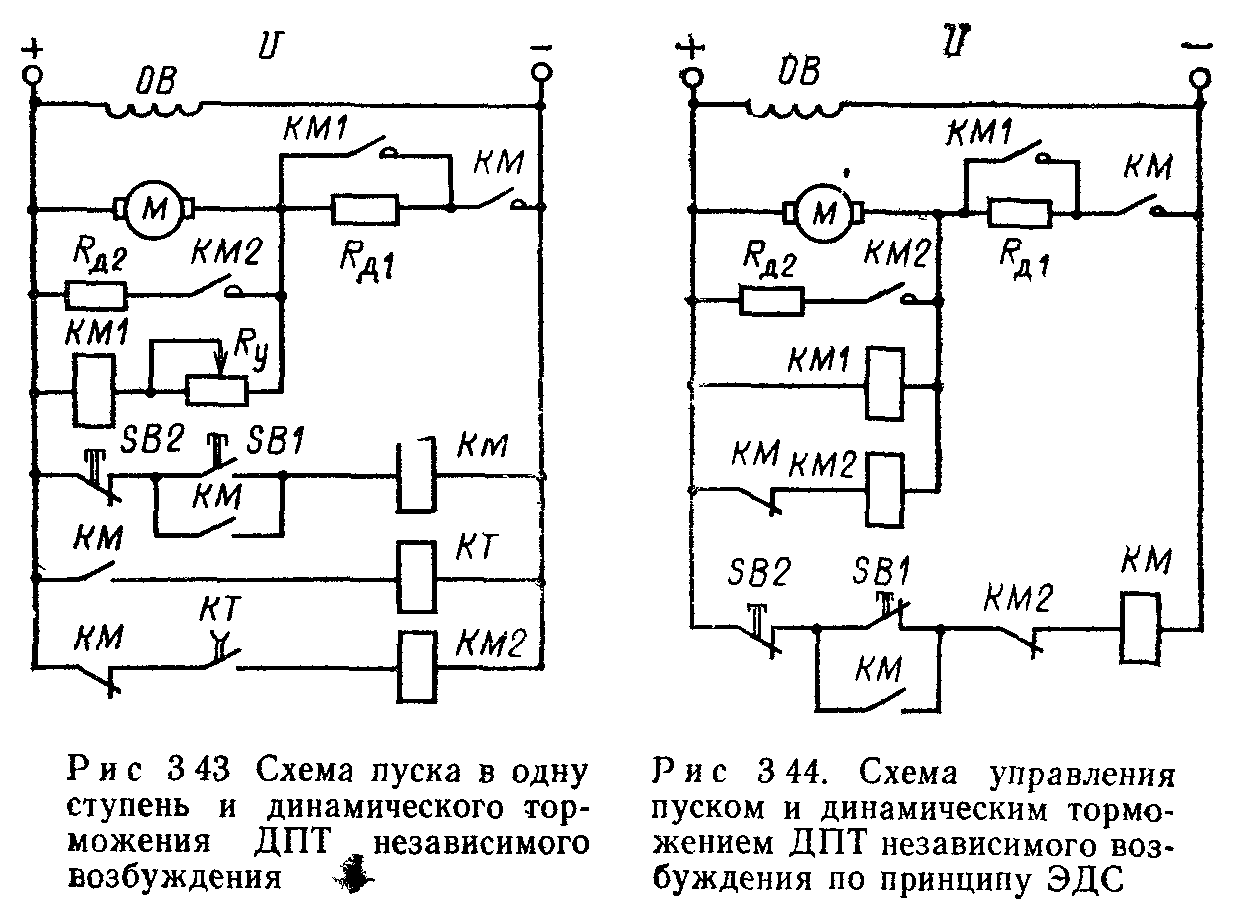
После подачи напряжения на схему происходит возбуждение ДПТ, а аппараты схемы остаются в исходном положении, изображенном на рис. 3.43. Пуск ДПТ осуществляется в одну ступень по принципу ЭДС, для чего в схеме используется контактор ускорения КМ1и пусковой резисторRд1. Порядок работы схемы при пуске аналогичен порядку работы схемы рис. 3.41,а.
Рассмотрим работу схемы при торможении, отметив вначале положение ее аппаратов после окончания пуска. Срабатывание линейного контактора КМпривело помимо включения ДПТ и шунтирования кнопкиSB1 кзамыканию цепи реле времениКТи размыканию цепи контактора торможенияКМ2.Замыкание контакта релеКТв цепи контактораКМ2подготавливает последний к включению в работу. Для осуществления торможения нажимается кнопкаSB2.КонтакторКМтеряет питание и отключает ДПТ от сети. Его размыкающий контакт в цепи контактора торможенияКМ2 замыкается, последний срабатывает и своим главным контактом подключает резисторRд2к ДПТ, переводя его в режим динамического торможения. Одновременно размыкается замыкающий контакт контактораКМв цепи реле времениКТ,оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению скорости ДПТ до нуля, реле времениКТотключается, и своим контактом разрывает цепь питания контактораКМ2, РезисторRд2отключается от якоря ДПТ, и схема возвращается в свое исходное положение.
Схема управления пуском и динамическим торможением по принципу ЭДС приведена на рис. 3.44. Она аналогична схеме рис. 3.43, за исключением того, что катушка контактора торможения КМ2подключена к якорю ДПТ через размыкающий контакт контактораКМ.
Пуск ДПТ осуществляется по принципу ЭДС в одну ступень. При пуске и работе ДПТ контактор торможения КМ2отключен размыкающим контактомКМ.
Торможение осуществляется нажатием кнопки 5.82. Контактор КМ,потеряв питание, отключает ДПТ от сети и замыкает своим размыкающим контактом цепь питания контактораКМ2. Последний срабатывает и подключает к ДПТ резистор динамического торможенияRд2. Процесс динамического торможения происходит до тех пор, пока при небольшой скорости ЭДС ДПТ не станет меньше напряжения отпускания контактораКМ2,тот отключится и схема вернется в исходное положение.
Схема управления пуском, реверсом и торможением противовключением в функции ЭДС приведена на рис. 3.45, а. Для обеспечения названных операций по управлению ДПТ в схеме предусмотрено два линейных контактораКМ1иКМ2,обеспечивающих вращение ДПТ соответственно в условных направлениях «Вперед» и «Назад».
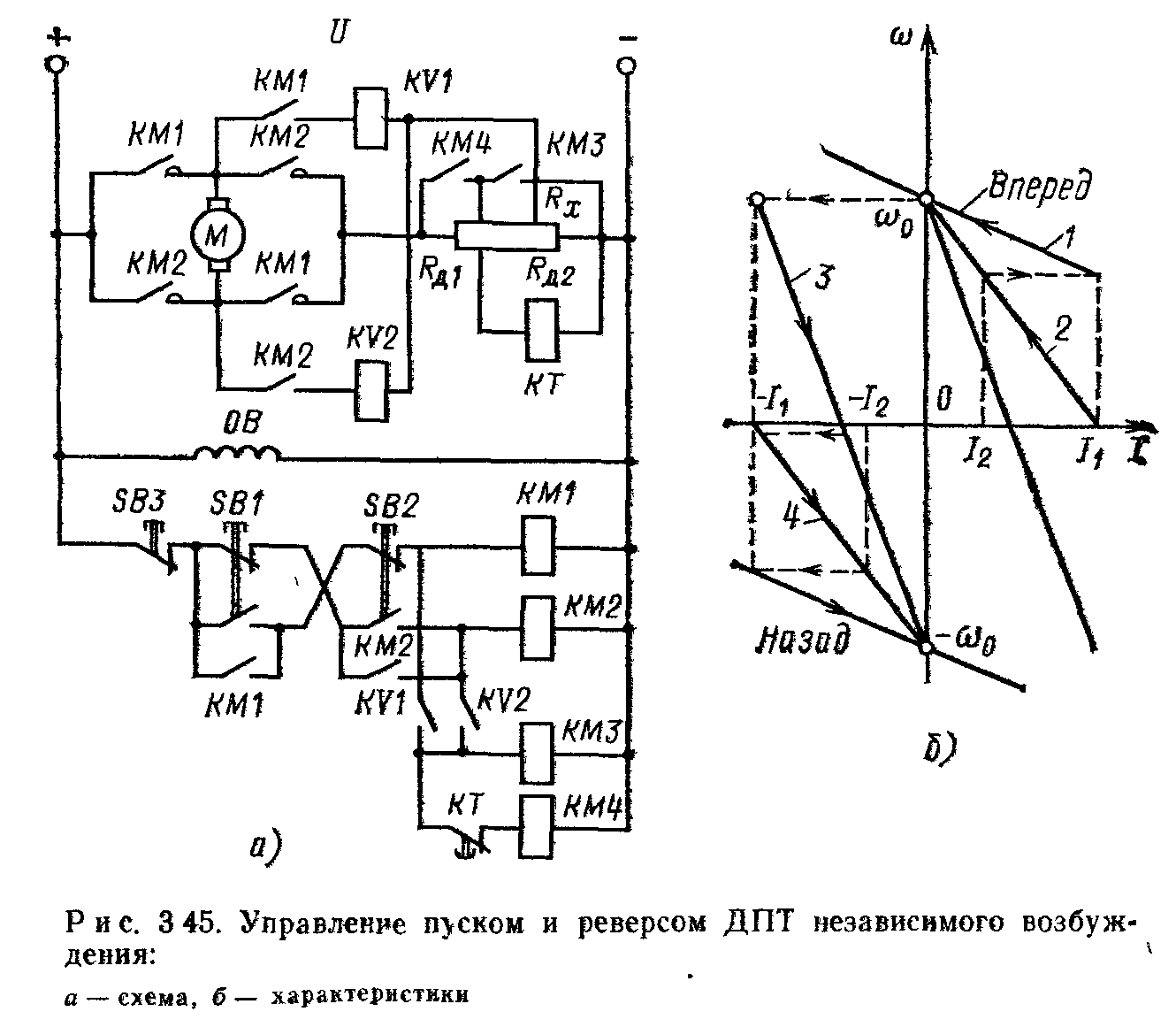
Главные контакты этих аппаратов образуют реверсивный мостик, с помощью которого можно изменить полярность напряжения на якоре ДПТ. В якорной цепи помимо пускового резистора Rд1включен резистор противовключенияRд2, который управляется контактором противовключенияКМЗ.
Управление ДПТ при торможении противовключением и реверс осуществляются с помощью двух реле противовключения KV1иKV2. Их назначение заключается в том, чтобы в режиме противовключения обеспечить ввод в цепь якоря в дополнение к пусковому резисторуRд1– резистор противовключенияRд2-Это достигается выбором точки присоединения катушек релеKV1иKV2,расчет которой будет выполнен ниже. Рассмотрим работу схемы, считая, что реле противовключения настроены должным образом, и принимая момент нагрузки на валу ДПТ для определенности равным нулю.
Пуск ДПТ в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки SB1срабатывает контакторКМ1и подключает якорь ДПТ к сети. За счет падения напряжения на резистореRд2от пускового тока срабатывает реле времениКТ, размыкая свой размыкающий контакт в цепи контактора ускоренияКМ4. ВключениеКМ1приводит также к включению релеKV1,которое, замкнув свой замыкающий контакт в цепи контактораКМЗ,вызовет его включение. КонтакторКМЗ,включившись, закорачивает неиспользуемый при пуске резистор противовключенияRд2и одновременно катушку реле времениКТ.Последнее, потеряв питание, начинает отсчет выдержки времени, после которой замкнет свой замыкающий контакт в цепи контактора ускоренияКМ4. Тот срабатывает, зашунтирует пусковой резисторRд1,и ДПТ выйдет на естественную характеристику.
Работу схемы рис. 3.45, аиллюстрирует рис. 3.45,б, на котором показаны электромеханические характеристики при различных полярностях напряжения на якоре и сопротивлениях добавочных резисторов. Пуск ДПТ в условном направлении «Вперед» происходит вначале по искусственной характеристике2.По истечении выдержки времени релеКТи срабатывании контактораКМ4ДПТ переходит на свою естественную характеристику 1,по которой продолжает разбег до скорости0.
Для осуществления торможения нажимается кнопка SB2,в результате чего отключаются контакторКМ1,релеKV1,контакторыКМЗиКМ4и включается контакторКМ2.Напряжение на ДПТ изменяет свою полярность, и ДПТ переходит в режим торможения противовключением с двумя резисторами в цепи якоряRд1иRд2. Несмотря на замыкание контактаКМ2в цепи релеKV2,оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратамКМЗиКМ4и зашунтировать резисторыRд1иRд2.
Переход ДПТ в режим противовключения также показан на рис. 3.45, б (переход ДПТ с естественной характеристики1на искусственную характеристику3).Во всем диапазоне скоростей 0<<0на этой характеристике ДПТ работает в режиме противовключения.
По мере снижения скорости ДПТ растет напряжение на катушке реле KV2,и при скорости, близкой к нулю, оно достигает напряжения срабатывания. Если в этот момент отпускается кнопкаSB2,то отключается контакторКМ2, схема возвращается в исходное положение и на этом процесс торможения ДПТ заканчивается.
Если же при достижении малых скоростей кнопка SB2 остается нажатой, то включается релеKV2и повторяется процесс пуска ДПТ, но уже в противоположную сторону. Таким образом, реверсирование ДПТ включает в себя два этапа – торможение противовключением и пуск в противоположном направлении. Второй этап реверса также отображен на рис. 3.45,б(переход ДПТ с характеристики3 на характеристику4,соответствующую обратной полярности напряжения на ДПТ и наличию в якоре добавочного резистораRд1).
Выполним теперь расчет точки присоединения реле KV1иKV2,что обеспечит надлежащую работу схемы рис. 3.45,а. На рис. 3.46,апоказана расчетная схема якорной цепи после замыкания контактораКМ2. Обозначим черезRполное сопротивление якорной цепи между точкамиАиDи черезRx–неизвестное рока сопротивление, определяющее положение искомой точкиСприсоединения реле противовключения.

Напряжение на реле KV2определяется соотношением
![]() (3.73)
(3.73)
а ток выражается как
![]() (3.74)
(3.74)
Решая совместно (3.73) и (3.74), найдем зависимость напряжения на реле от скорости
![]() (3.75)
(3.75)
На рис. 3.46, бпоказаны зависимостиUKV2() при различных значенияхRx. Крайние прямые соответствуют предельным значениямRx, приRx=0Uкv2=U=const; приRx=R Uку2= –c; при 0<Rx/R<1 характеристики занимают промежуточное положение, пересекаясь в точке с координатами (–0,U).
При настройке схемы рис. 3.45, а обычно выбирают точку присоединения реле таким образом, чтобы в момент перехода ДПТ в режим торможения противовключением напряжение на реле противовключения было близко к нулю. Этому требованию отвечает характеристика 1 на рис. 3.46, б. Рассчитаем соответствующее ей сопротивлениеRx.Условие расчета величиныRxвыражается какUкv=0 при=0. Подставляя эти равенства в (3.75) и учитывая, чтоU=с0, получаем следующую формулу для расчетаRx.
![]() (3.76)
(3.76)
Определим теперь, какое будет при этом напряжение на катушке реле противовключения при нулевой скорости двигателя. Подставляя в (3.75) значение =0 и соотношение (3.76), получаем
![]() (3.77)
(3.77)
Таким образом, если выбрать точку присоединения реле противовключения в соответствии с (3.76), а напряжение его срабатывания–в соответствии с (3.77), то будет обеспечен рассмотренный выше порядок работы схемы рис. 3.45, а.
В силу полной симметрии схемы управления полученные соотношения и выводы в полной мере относятся к реле противовключения KV1.
в) Пример практической схемы управления ДПТ
Практические схемы управления ДПТ выполняют одновременно несколько функций, обеспечивая пуск, реверс, торможение, регулирование скорости. Помимо этого, они содержат коммутационную аппаратуру и элементы защиты и блокировки, предотвращающие различные аварийные ситуации, ненормальные режимы работы ДПТ, неправильную последовательность операций по управлению ДПТ и т.д.
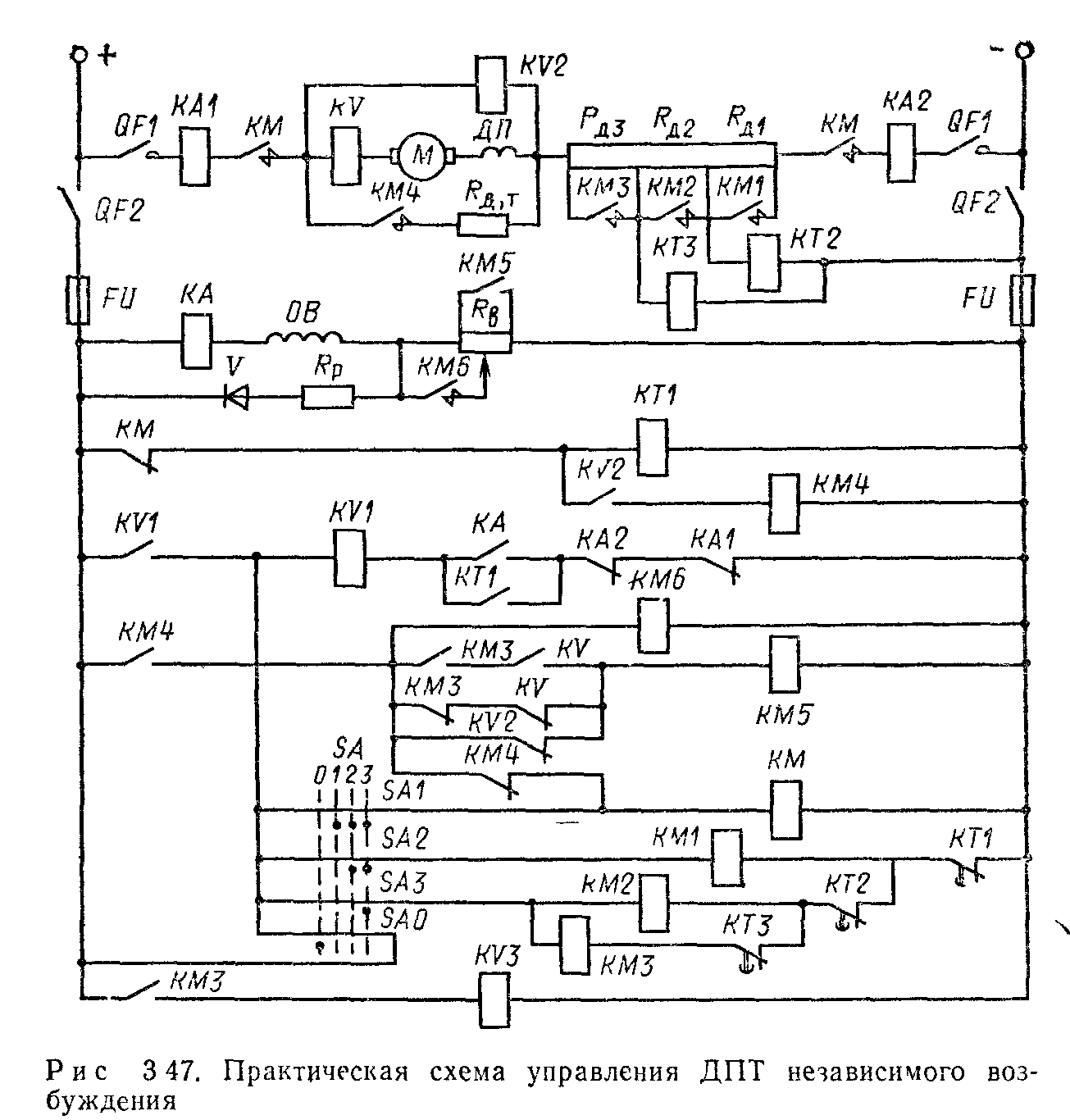
Разнообразные практические схемы управления создаются исходя из конкретных требований к электроприводу и условий его работы. Тем не менее все они содержат те или иные рассмотренные выше основные узлы и типовые виды защит и блокировок. Рассмотрим одну из реальных схем управления ДПТ независимого возбуждения, показанную на рис. 3.47. Эта схема обеспечивает пуск, динамическое торможение и регулирование скорости ослаблением магнитного потока. Пуск ДПТ осуществляется в три ступени по принципу времени, а торможение – по принципу ЭДС. Органом управления является командоконтроллер SA, имеющий четыре положения рукоятки – одно нулевое (начальное) и три рабочих.
В состав основного оборудования схемы входят: линейный контактор КМ;контактор динамического торможенияКМ4;контакторы ускоренияКМ1, KM2, КМЗ;реле времениKTI, K.T2, КТЗ;реле управленияKV, KV2, KV3;контактор управление полемКМ5;экономический контакторКМ6;пусковые и тормозной резисторыRд1,Rд2, Rд3, Rд,т; резистор в цепи возбужденияRв.
К элементам коммутации, защит и блокировок относятся автоматические выключатели QF1иQF2,предохранителиFU;реле контроля напряженияKV1,реле максимального токаКА1иКА2реле обрыва поляКА,разрядный резисторRpи вентильV.
Рассмотрим работу схемы при пуске ДПТ. Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются выключатели QF1иQF2и на схему подается напряжение. В обмотке возбуждения появляется ток возбуждения и, кроме того, срабатывает реле времениKT1,шунтируя в цепи релеKV1своим контактом контакт релеКА.Если при этом реле максимального токаКА1иКА2находятся в нормальном (невключенном) положении, то срабатывает релеKV1,подготавливая питание схемы управления через свой замыкающий контакт.
Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения ДПТ или ток в якоре превысит допустимый уровень, то произойдет отключение реле KV1схема управления лишится питания и ДПТ будет отключен от сети.
Для пуска ДПТ на максимальную скорость рукоятка командоконтроллера SAперемещается в крайнее третье положение. Это приведет к срабатыванию контактораКМ и подключению якоря ДПТ к сети, после чего он начнет свой разбег. Реле времениКТ1,потеряв питание вследствие размыкания контактаКМ,начнет отсчет выдержки времени работы на первой ступени, а релеКТ2иКТЗ,сработав от падения напряжения на резисторахRд1иRд2, разомкнут свои контакты в цепях контакторов ускоренияКМ2иКМЗ.Одновременно с этим включаются «экономический» контакторКМ6и контактор усиления потокаКМ5, врезультате чего шунтируется резисторRви пуск ДПТ происходит при полном магнитном потоке.
Через определенное время закроется размыкающий контакт КТ1,контакторКМ1включится, зашунтирует первую ступень пускового резистораRд1и одновременно катушку реле времениКТ2.Последнее, отсчитав свою выдержку времени, включит контакторКМ2, который закоротит вторую ступень пускового резистораRд2и катушку релеКТЗ. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактораКМЗи закорачивание последней ступени пускового резистора, после чего ДПТ выходит на свою естественную характеристику.
После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое осуществляется аппаратами КМ5, KV2иKV.В процессе ослабления поля с помощью релеKVобеспечивается контроль за током якоря. При толчках тока релеKVобеспечивает включение или отключение контактораКМ5,усиливая или ослабляя магнитный поток, в результате чего ток в якорной цепи не выходит за допустимые пределы.
Торможение ДПТ осуществляется перестановкой рукоятки командоконтроллера в нулевое положение. Это приводит к выключению контактора КМи отключению якоря ДПТ от сети. Поскольку в процессе пуска ДПТ реле динамического торможенияKV2включилось, то замыкание размыкающего контактаКМв цепи контактора торможенияКМ4вызовет его включение. РезисторRд,токажется подключенным на якорь ДПТ, который перейдет в режим динамического торможения. При малых скоростях ДПТ, когда его ЭДС станет ниже напряжения отпускания (удержания) релеKV2,оно отключится, выключит контакторКМ4и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке.