

bg_0490oxford_glazkov / Глава 9-Р
.docxГлава 9
ОРГАНЫ УПРАВЛЕНИЯ С СИЛОВЫМ ПРИВОДОМ
Содержание
ВВЕДЕНИЕ 179
СИЛОВЫЕ ОРГАНЫ УПРАВЛЕНИЯ 179
РАБОТА 180
АВТОМАТЫ ЗАГРУЗКИ 181
РАБОТА 183
СИСТЕМА АВТОМАТА ЗАГРУЗКИ 184
СИСТЕМА ТРИММИРОВАНИЯ АВТОМАТА ЗАГРУЗКИ 185
ЭЛЕКТРО-ДИСТАНЦИОННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ (FLY BY WIRE – FBW) 186
РЕЗЕРВИРОВАНИЕ 188
ВОПРОСЫ 190
ОТВЕТЫ 192
ВВЕДЕНИЕ
У некоторых современных самолетов органы управления подвергаются воздействию высоких нагрузок либо из-за перемещения поверхностей большой площади, либо при работе органами управления на высоких скоростях. Максимальные нагрузки на управление определены в JAR-125.143 (с).
Для снижения усилий на рукоятке управления, создаваемых высокими воздушными нагрузками, применяется гидравлическая или электрическая энергия. Большинство силовых органов управления имеют гидравлический привод; а в зависимости от степени требуемой разгрузки бывают частично и полностью силовыми.
СИЛОВЫЕ ОРГАНЫ УПРАВЛЕНИЯ
Простая силовая система управления имеет следующие основные компоненты:
а) Гидравлический привод;
b) Серво или управляющий клапан;
с) Автомат загрузки.
Описанные выше компоненты должны иметь некоторую форму «слежения» или «обратной связи» для гарантирования, что перемещение поверхности управления пропорционально величине перемещения органа в кабине; и иметь некоторую форму загрузки органа в кабине, пропорциональную воздушным нагрузкам на поверхности управления.

Рис. 9.1. Иллюстрация требований к системе
РАБОТА
Когда колонка управления оттягивается назад, управляющий клапан перемещается влево с помощью механизма системы управления. При этом открывается левое отверстие привода для гидравлического давления и правое отверстие для возврата. Теперь гидравлическое давление будет перемещать корпус привода влево (т.к. шток прикреплен к конструкции самолета), поднимая руль высоты.
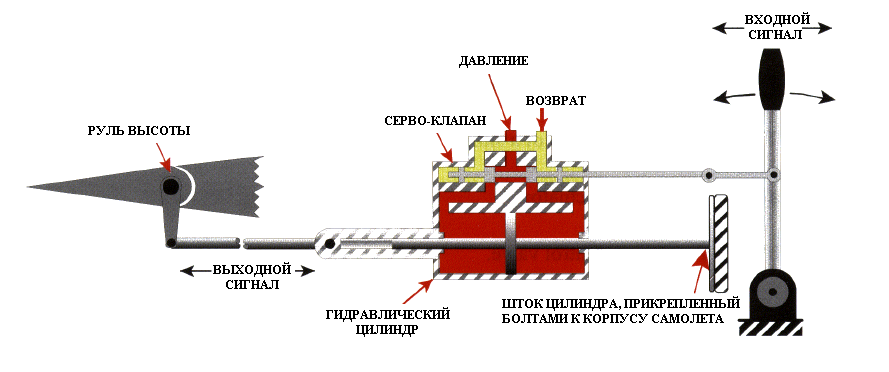
Рис. 9.2. Схема силового органа управления
При перемещении корпуса привода положение поршней управляющего клапана постепенно изменяется до тех пор, пока они снова не перекроют отверстия привода, отсекая дальнейшую гидравлическую подачу и блокируя возвратное отверстие. Это создает гидравлический замок на силовом приводе и предотвращает дальнейшее перемещение поверхности управления. По этой причине перемещение поверхности управления пропорционально выбранной величине перемещения управляющего клапана и обеспечивается необходимая система обратной связи. Это нереверсивная система, в которой перемещение поверхности управления не может вызвать перемещение колонки управления.
Когда органы управления полетом имеют силовой привод, появляется необходимость в некотором дублирующем управляющем блоке для защиты в случае отказа системы. Обычно это достигается с помощью последовательной или параллельной установки дублирующих силовых блоков управления. Блоки будут иметь некоторую форму обратимости энергии, как показано в примере, и будут приводиться отдельными гидросистемами. В случае отказа любой системы или отсоединения ее пилотом, падение гидравлического давления позволит подпружиненному поршню открыть перепускной канал и предотвратить образование гидравлического замка на приводе. Это потом позволит силовому органу управления следовать управляющим воздействиям резервного блока.
АВТОМАТЫ ЗАГРУЗКИ
Когда для работы органов управления используются гидравлические приводы, гидравлическое давление перемещает поверхности управления и снимает с пилота любое ощущение органов управления в кабине. В таких условиях пилот не имеет понятия о требуемой величине перемещения поверхности, вследствие чего можно потерять контроль над самолетом.
Для предотвращения подобной ситуации в данные системы устанавливается автомат загрузки, который разработан, чтобы создать пилоту ощущение органа управления, пропорциональное скорости самолета и величине выполненного перемещения поверхности управления. Конструкция таких устройств меняется от простого пружинного блока, как показано на рис. 9.3., до операционной системы с потенциометром “Q”- типа.
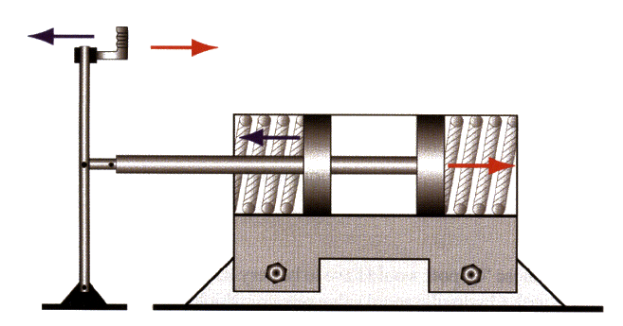
Рис. 9.3
Перемещение колонки управления в любом направлении будет обжимать одну или другую пружину. Простой блок с потенциометром “Q”- типа показан на рис. 9.4. Этот блок содержит простой поршень, соединенный двойным звеном с колонкой управления, поэтому при любом направлении перемещения колонки поршень будет вытягиваться вперед против действия полного давления, приложенного к передней части пресса. Задняя часть пресса открыта для статики, чтобы воспринимать давление с передней части поршня для измерения динамического давления, которое гарантирует, что ощущение органа управления пропорционально скорости самолета.
(Полное давление – Статическое давление = Динамическое давление)
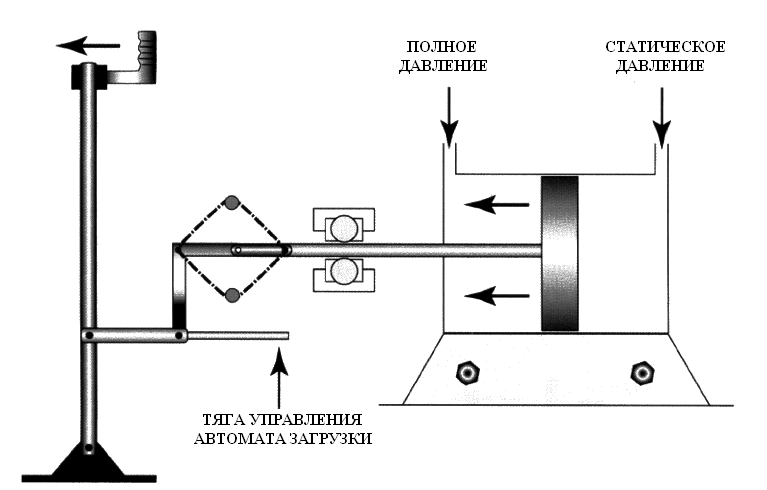
Рис. 9.4
Чтобы быть эффективными данные “Q” потенциометры должны иметь очень большие размеры, поэтому в настоящее время такие блоки применяются совместно с золотниковым гидрораспределителем, который обеспечивает подачу гидрожидкости к поршню. На рис. 9.5 изображен простой автомат загрузки с “Q” потенциометром.

Рис. 9.5
РАБОТА
При поступательном перемещении самолета полное давление подается в верхнюю камеру приемника “Q” потенциометра, толкая вниз диафрагму. Чем быстрее самолет летит, тем большее давление будет давить на диафрагму. Диафрагма соединена с золотниковым гидрораспределителем, поэтому перемещение вниз диаграммы открывает канал нагнетания и частично закрывает обратный канал. Гидрожидкость, поступающая в блок, далее проходит к передней стороне поршня и через узкий канал в нижнюю часть золотникового клапана для гашения его перемещения вниз. Чем быстрее летит самолет, тем выше полное давление, которое давит на диафрагму, больше открытие канала нагнетания в распределителе, что означает, что давление перед поршнем будет увеличиваться, повышая сопротивление для дальнейшего перемещения органа управления. Возвратный канал никогда не перекрывается полностью, т.к. это создаст гидравлический замок в системе. Большое управляющее перемещение будет иметь похожий эффект на ощущение органа управления, как и высокая скорость.
На рис. 9.6 показаны два главных устройства в любой системе силового органа управления и их соединение с колонкой управления пилота.
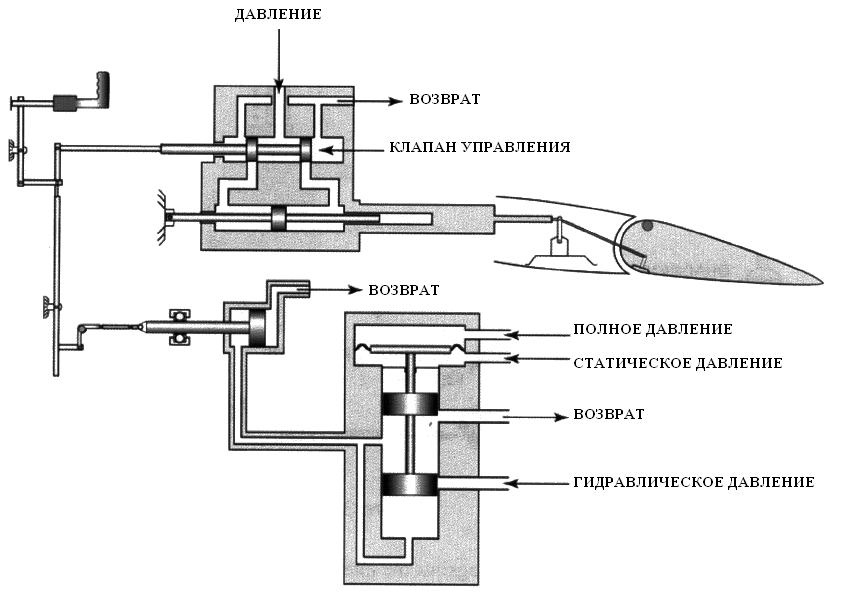
Рис. 9.6
СИСТЕМА АВТОМАТА ЗАГРУЗКИ
В системе автомата загрузки, показанной на рис. 9.7, применяется как пружинная, так и гидравлическая загрузка. Пружинный загружатель может быть полезен на низких скоростях, но на более высоких скоростях для предотвращения перегрузки конструкции самолета необходимо большее сопротивление перемещению органов управления в кабине.
Двойной кулачок в заднем секторе управления элерона иллюстрирует стремление автомата загрузки установить колонку управления в нейтральное положение. Пилот, перемещая колонку, должен сжать пружину и преодолеть силу, приложенную к гидравлическому поршню.
Гидравлическую загрузку создает компьютер. Полное давление передается на верхнюю часть диафрагмы воздушной скорости, а статическое давление подается на другую сторону диафрагмы. Диафрагма создает силу, направленную вниз на две системы пружин: одна на верхней части кулачка положения стабилизатора, другая – над дозирующим клапаном; и эта сила пропорциональна скорости самолета.
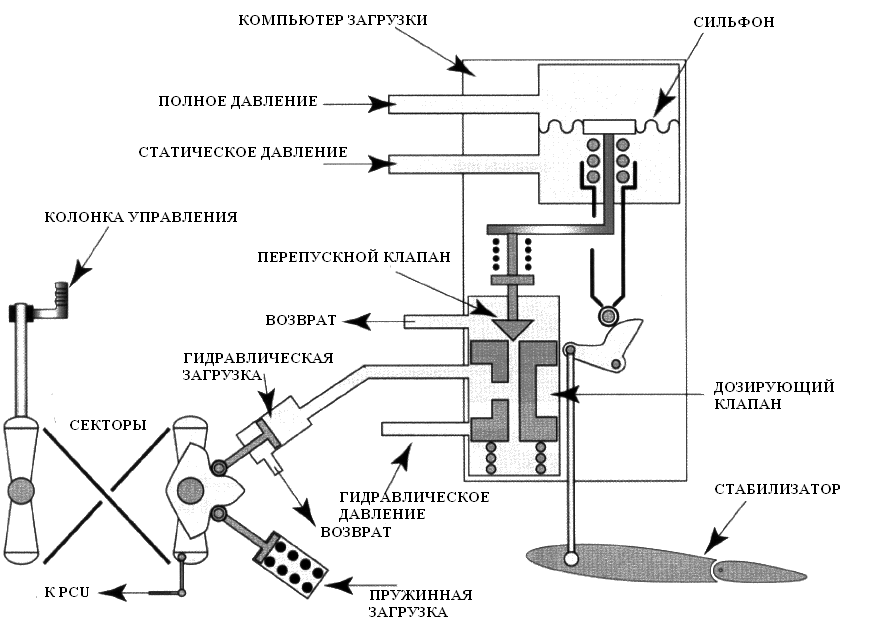
Рис. 9.7
Дозированные силы давления воздействуют на внутренние горизонтальные поверхности дозирующего клапана, уравновешивая друг друга, стремясь сохранить его в нейтральном положении. Если дозированного давления, действующего на перепускной клапан в верхней части дозирующего клапана, достаточно для уравновешивания силы, направленной вниз, действующей на него со стороны диафрагмы и пружины, отверстие для подачи давления остается закрытым.
При увеличении воздушной скорости, сила, действующая вниз на дозирующий клапан, возрастает и преодолевает силу дозированного давления, смещая вниз клапан. Внутреннее отверстие для гидравлического давления открывается, пока дозированное давление не уравновесит силу, действующую вниз на дозирующий клапан. Дозирующий клапан постоянно колеблется для компенсации перепуска дозированного давления.
Если пилот перемещает колонку управления, он должен приложить силу, действующую вверх, к поршню гидравлической загрузки внутри цилиндра, это превысит силу, действующую на поршень со стороны системы. Сила, приложенная пилотом, передается на перепускной клапан, который немного приоткрывается и пропускает гидрожидкость, противодействуя полному давлению, действующему на него сверху вниз.
Компьютер загрузки содержит систему триммирования нагрузки, которая соединяет горизонтальный стабилизатор с перепускным клапаном с помощью кулачка и сильфона. Работа рулей высоты создает силу на колонке управления, которую необходимо снять после завершения управляющего перемещения. Для снятия силы на колонке управления пилот триммирует управляемый стабилизатор до удаления нагрузки на колонке и возвращения руля направления в нейтральное положение.
СИСТЕМА ТРИММИРОВАНИЯ АВТОМАТА ЗАГРУЗКИ
На рис. 9.8 изображена базовая схема автомата загрузки с гидравлическим управлением с системой триммирования. При нормальной работе органов управления создается нагрузка на колонке управления, которую необходимо регулировать. Это происходит с помощью руля управления триммером, который будет спускать давление, действующее сверху вниз на дозирующий клапан, позволяя сильфону расширяться вниз одновременно с триммированием стабилизатора или руля направления «без рук».
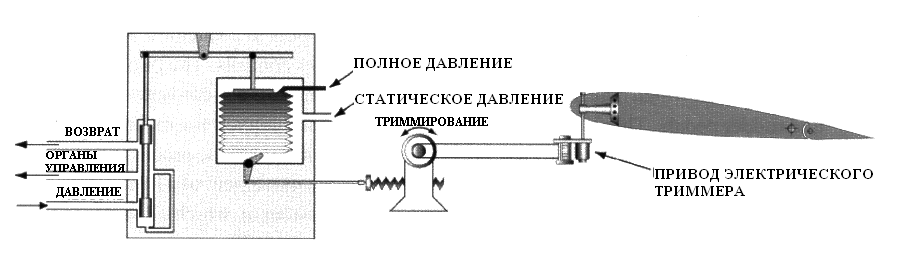
Рис. 9.8
На рис. 9.9 приведена упрощенная схема силовой системы управления полетом на современных гражданских самолетах.

Рис. 9.9
ЭЛЕКТРО-ДИСТАНЦИОННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ (FLY BY WIRE – FBW)
Это силовая система управления полетом, в которой применяются не механические входные сигналы для органов управления, а электронные входные сигналы для серво клапанов с приводом от соленоидов. Пилот управляет органами в кабине, которые могут представлять собой джойстик, как на самолетах Airbus, или распространенную колонку управления и педали руля направления. Это передается на преобразователи, которые превращают механические входные сигналы в электрические на выходе, сигналы усиливаются, обрабатываются компьютерами, вырабатывается командный сигнал на вход серво клапана, который управляет перемещением гидравлического привода. А320 является типичным примером самолета с системой FBW, у которого все поверхности имеют гидравлический привод и электрическое или механическое управление. Основная схема управления описана ниже.
Управление тангажом
Электрическое управление рулем высоты.
Электрическое (для нормальных условий) или альтернативное управление стабилизатором. Механическое или ручное триммирование.
Управление креном
Электрическое управление элеронами.
Электрическое управление спойлерами.
Управление рысканием
Механическое управление рулем направления с электрическим управлением для гашения нежелательного рыскания, координирования поворота и триммирования.
Электрическое управление предкрылками и закрылками.
Электрическое управление аэродинамическими тормозами.
Органы управления в кабине состоят из двух джойстиков, общепринятых педалей руля направления и приборной панели.
Электрическое управление осуществляется компьютерами трех типов:
-
ELAC (Elevator Aileron Computer) – компьютер руля высоты и элеронов.
Существует два таких компьютера, управляющих элеронами, рулями направления и стабилизатором.
-
SEC (Spoilers Elevator Computer) – компьютер спойлеров и руля высоты.
Существует три таких компьютера, управляющих верхними поверхностями крыла и резервными системами руля направления и стабилизатора.
-
FAC (Flight Augmentation Computer) – компьютер системы автостабилизации самолета.
Два компьютера для электрического управления руля направления.

Рис. 9.10. Блок-схема электро-дистанционной системы управления
РЕЗЕРВИРОВАНИЕ
У современных транспортных самолетов должны быть предусмотрены меры безопасности для устранения вероятности потери управления в случае отказа гидравлики или электрики. Главным образом это достигается с помощью некоторых форм резервирования в системе управления. Распространенным методом является разделение поверхности управления на две или три секции, каждая из которых имеет собственные приводы и гидросистемы. Также обеспечивается резервирование компьютерной системы, как на примере самолета Airbus, представленном на рис. 9.11.
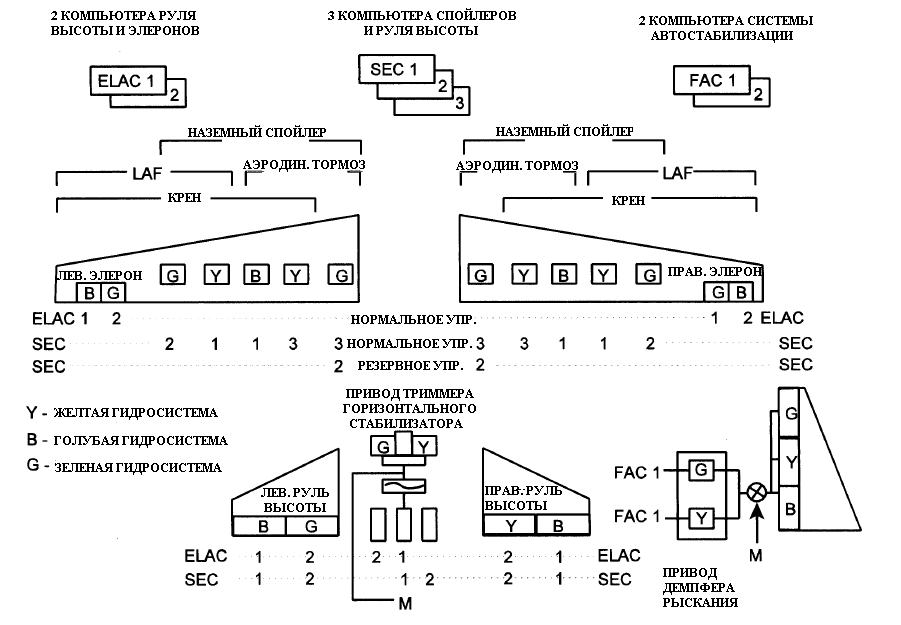
Рис. 9.11. Резервирование системы управления