

13.3Условие Липшица для градиента ф-и f(x)
Неравенство
jjf0(x) f0(y)jj 6 Rjjx yjj (8)
называется условием Липшица, а R постоянной Липшица.
13.3.1О сходимости градиентого метода
Теорема. Если ф-я f(x) ограничена снизу, ее градиент удовлетворяет условию Липшица (8) и выбор значения k производится методом дробления шага или методом наискорейшего спуска, то какова бы не была начальная точка x0
jjf0(xk)jj ! 0
приk ! 1 (Без док-ва)
xk+1 = xk kf0(xk)
при f0(xk) ! 0 превращается в
xk+1 = xk
13.4Методы покоординатного спуска (для отыскания безусловного экстремума)
Пусть
0x101
Bx2C
x0 = B 0C
@::: A xn0
начальное приближение.
Возьмем @f(x0) и примем
dx1
x1 = x0 o @f(x10) e1
@x
где
24

0 1
1
B0 C
e1 = B:::C @ A
0
e1 единичный вектор-столбец оси x1. .
Следующая итерация состоит в вычислении точки x2 по формуле
x2 = x1 1 @f(x20) e2
@x
где
0 1
0
B1 C
e2 = B:::C @ A
0
единичный вектор оси x2. Дальнейшие итерации аналогичны.
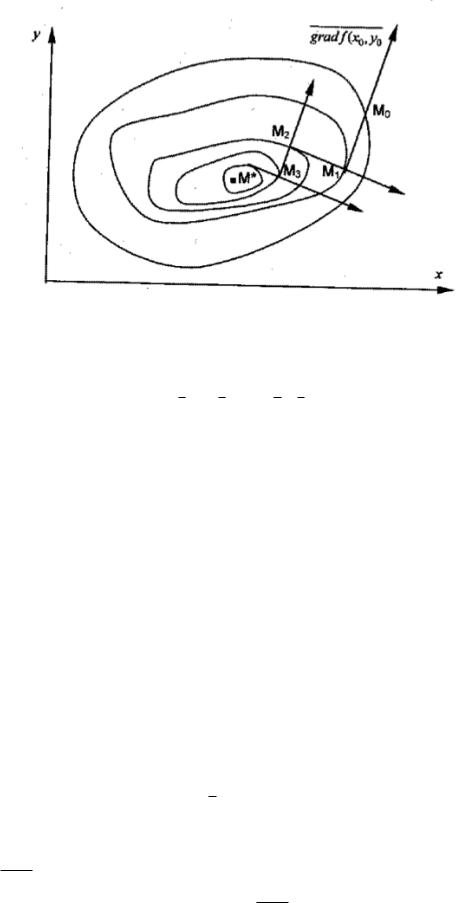
Cледовательно в данном методе спуск происходит по ломанной, состоящей из отрезков прямых, параллельных координатным осям. Спуск по n координатам составляет одну внешнюю итерацию.
Пусть k - номер очередной внешей итерации, а s номер той координаты, по которой производится спуск, тогда рекурентная формула, определяющая следующие приближения к точке минимума будет иметь вид:
xkn+s+1 = xkn+s kn+s @f(xkn+s) esk = 1; 2; ::: s = 1; 2; :::; n (1)
@xs
Или в координатной форме
(xkn+s+1 |
= xkn+s kn+s |
@xs |
i = s |
|
||
xkni |
+s+1 |
= xkni |
+s |
@f(xkn+s) |
i 6= s |
(2) |
i |
|
i |
|
|
|
|
После s = n счетчик числа больших итераций k увеличивается на единицу, а s = 1. Величина шага k выбирается на каждой итерации или методом дробления шага или методом наискорейшего спуска.
13.4.1Метод покоординатного спуска без вычисления производных
В методе покоординатного спуска в формулах (1) и (2) производные @f(xkn+s) производные можно не
@xs
вычислять, тогда
xkn+s+1 = xkn+s kn+s es k = 1; 2; ::: s = 1; 2; :::; n (3)
При таком определении последующего приближения следует проверить выполнение неравенства
f(xkn+s kn+ses) < f(xkn+s) (4)
Если (4) не выполняется, то следующее приближение xkn+s+1 определяется по формуле
xkn+s+1 = xkn+s + kn+ses (5)
и проверяется выполнение условия
f(xkn+s + kn+ses) < f(xkn+s) (6)
Если одновременно не выполняются неравенства (4) и (6), то производится дробление шага.
13.4.2Рекомендации по применению этого метода
В большинстве методов для определения экстремальных значений ф-ий требуется вычисление первых или даже вторых производных минимизируемых ф-ий, однако в практических задачах нередко встречаются случаи, когда минимизируемая ф-я либо не обладает нужной гладкостью (производные с разрывами, не всегда вычисляются) либо являются гладкой, но вычисление ее производных с требуемой точностью требует слишком большого объема работ. В таких случаях целесообразно использовать методы покоординатного спуска без вычисления производных.
25
Часть III
Минимизация ф-ий многих переменных при ограничениях-равенствах
14 Относительный (условный) экстремум
Пусть необходимо найти экстремумы ф-и f(x) и нужно найти f(x) ! max f(x) ! min при наличии ограничений типа равенства
gi(x) = 0 i = 1; 2; :::; m (1:1)
Условия (1:1) принято называть у-ниями связи.
Определение 1. Точка x удовлетворяющая условиям (1:1) называется допустимой.
Определение 2. Допустимая точка x доставляет относительный или условный локальный минимум ф-и f(x), если можно указать такое число
" > 0
что для всех x, удовлетворяющих у-ниям связи (1:1) и условию
jx x j < "
имеет место неравенство
f(x) > f(x )
т. е. в этой точке имеет место наименьшее значение ф-и.
Определение 3. Допустимая точка x доставляет относительный или условный локальный максимум ф-и f(x), если можно указать такое число
" > 0
что для всех x, удовлетворяющих у-ниям связи (1:1) и условию
jx x j < "
имеет место неравенство
f(x) < f(x ).
Определение 4. Точку x называют глобально-оптимальным решением задачи (1:1) на минимум, если
f(x ) = min f(x)
при
gi(x) = 0 i = 1; 2; :::; m
15Необходимые условия локального экстремума при ограниченияхравенствах
15.1Метод исключения
Пусть даны n функций от n переменных: g1(x1; x2; :::; xn); :::; gn(x1; x2; :::; xn), которые определены в некоторой n-мерной области D и имеют в ней непрерывные частные производные по всем переменным. Определитель
|
@g1 |
@g1 |
::: |
@g1 |
|
@x1 |
@x2 |
@xn |
|||
@g2 |
@g2 |
::: |
@g2 |
||
|
@x1 |
@x2 |
@xn |
|
|
|
|
|
|
|
|
|
::: |
::: |
::: |
::: |
|
|
|
||||
|
|
|
|
|
|
@gn |
@gn |
::: |
@gn |
|
@x1 |
@x2 |
@xn |
26
называют функциональным определителем Якоби или Якобианом.
Рассмотрим случай, когда у-ния связи (1:1) могут быть разрешены относительно части переменных. Будем предполагат, что ф-и gi(x) i = 1; 2; :::; m имеют в окрестности рассматриваемой допустимой точки x непрерывные частные производные по всем аргументам до второго порядка включительно. Кроме того предполагаем, что ранг матрицы Якоби для этих функций рассматриваемой в точке x равен m. Ненарушая общности предположим так же, что отличен от нуля определитель (Якобиан), составленный из частных производных по первым m аргументам:
|
@g1 |
@g1 |
|
|
@g1 |
|
|
@x1 |
@x2 |
::: |
@xm |
= 0 (1:2) |
|||
|
@x1 |
@x2 |
::: |
@xm |
|
|
|
@g2 |
@g2 |
|
|
@g2 |
6 |
||
|
|
|
|
|
|
|
|
|
::: |
::: |
::: |
::: |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
@gm |
@gm |
::: |
@gm |
|
@x1 |
@x2 |
@xm |
Тогда по теореме о неявных функциях в некоторой окрестности точки x система у-ний (1:1) разрешима относительно x1; x2; . . . ; xm т. е. представима в виде
xj = 'j(xm+1; xm+2; :::; xn) j = 1; 2; :::m (1:3)
'j(xm+1; xm+2; :::; xn) непрерывно дифференцируемые в рассматриваемой окрестности ф-и. Переменные xm+1; :::; xn называют независимыми переменными, а x1; :::; xm зависимыми переменными. Подставляя (1:3) в ф-ию f(x) получим задачу определения безусловного экстремума ф-и n m переменных.
f('j(xm+1; xm+2; :::; xn); :::; 'm(xm+1; xm+2; :::; xn); xm+1; :::; xn) = fe(xm+1; :::; xn)
Однако провести исключение части переменных обычно бывает трудно или даже невозможно.
15.2Классическая ф-я Лагранжа. Классический метод множителей Лагранжа
В методе исключения нарушается симметрия в отношении переменных: часть из них трактуются как независимые, а часть как зависимые. Одни переменные исключаются, другие сохраняются. Лагранжем был предложен метод, в котором все переменные сохраняют одинаковую роль (внешне, однако и при выводе и при использовании неявно разделяются).
В точке x , доставляющей безусловный экстремум ф-и, полный дифференциал ф-и равен 0
m
df(x ) = P @f(xr ) dxr +
@x
r=1
n
P @f(xj ) dxj = 0 (2:1)
@x
j=m+1
где dxr дифференциалы зависимых переменных r = 1; 2; :::; m, связанные с дифференциалами независимых переменных dxj j = m + 1; :::; n следующим образом
m
P @gi(x ) dxr + @xr
r=1
n |
@gi(x ) |
|
|
j=P |
j |
||
|
dx = 0 i = 1; 2; :::; m (2:2) |
||
@xj |
|||
m+1 |
|||
|
|
Исключим теперь дифференциалы зависимых переменных из у-ний (2:1) и (2:2). Для этого умножим каждое из у-ний системы (2:2) на произвольные множители 1; 2; :::; m и результаты сложим с у-нием
(2:1)
Получим следующее равенство
n |
@f(x ) |
|
1 @g1(x ) |
|
m @gm(x ) |
|
n |
@f(x ) |
|
1 @g1(x ) |
|
m @gm(x ) |
|
|||||||||
P |
|
|
r |
j=P |
|
|
j |
|||||||||||||||
|
|
+ |
|
|
|
+ ::: + |
|
|
|
)dx + |
|
|
+ |
|
|
+ ::: + |
|
|
|
)dx = 0 (2:3) |
||
|
r |
|
|
r |
|
|
r |
|
j |
|
j |
|
|
j |
||||||||
( |
@x |
|
@x |
|
@x |
( |
@x |
|
|
@x |
||||||||||||
r=1 |
|
|
|
|
|
|
|
|
m+1 |
|
|
|
@x |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Определим множители 1; 2; :::; m чтобы обратились в нуль коэффициенты при дифференциалах ¾зависимых¿ переменных
@f(x |
) |
+ 1 |
@g |
(x ) |
+ ::: + m |
@g |
(x ) |
|
||||
|
r |
|
1 |
|
|
|
|
m |
|
= 0 r = 1; 2; :::; m (2:4) |
||
@x |
|
@x |
r |
|
r |
|||||||
|
|
|
|
|
|
@x |
|
|
||||
Это можно сделать так как определитель (1:2) не равен 0. При выбранных таким образом значениях множителей в равенстве (2:3) останутся только слагаемые, содержащие дифференциалы независимых переменных. Поэтому коэффициенты при этих дифференциалах должны быть равны 0.
@f(x |
) |
+ 1 |
@g |
(x |
) |
+ ::: + m |
@g |
(x |
) |
|
||||
|
j |
|
1 |
|
|
|
|
|
m |
j |
|
= 0 j = m + 1; :::; n (2:5) |
||
@x |
|
@x |
j |
|
|
@x |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Следовательно, получена система n+m у-ний (1:1) (2:4) (2:5) относительно неизвестных x1; :::; xn; 1; :::; mэто и есть метод множителей Лагранжа.
27