

ДИПЛОМНИЙ ПРОЕКТ / ДП Модернізація вагового дозатора. Безбах І.С. МВТ-13 сп / 3 Розробка структурної схеми приладу
.docx
3 Розробка структурної схеми приладу
3.1 Вибір оптимального варіанту структурної схеми
В даному розділі буде розроблена структурна схема мікропроцесорної ваговимірювальної системи модернізованого дозатора АД-50-РКМ. Буде представлено три варіанти структурних схем, порівнявши які, за певними критеріями та охарактеризувавши їх, буде обрано оптимальну структурну схему, на основі якої буде розроблена інформаційно-вимірювальна система маси. Розглянемо першу структурну схему, яка наведена на рисунку 3.1:
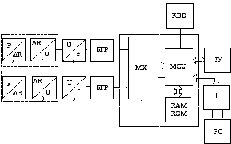
Рисунок 3.1 – Перший варіант реалізації структурної схеми мікропроцесорної ваговимірювальної системи модернізованого дозатора АД-50-РКМ
Дана схема складається з наступних основних вузлів: P/U – первинний перетворювач (тензорезистивний сенсор); U/f – вторинний перетворювач напруги в частоту; БГР– блок гальванічної розв’язки; МХ – мультиплексор; MCU – мікроконтролер; І – інтерфейс обміну даними; ЗУ – засіб управління.
Принцип дії схеми: по двох каналах проводиться вимірювання ваги, на виході яких після вимірювання утворюється аналогова величина, яка поступає далі на вторинний перетворювач напруги в частоту. Блок гальванічної розв’язки здійснює функцію відокремлення блоків живлення вимірювальних каналів. Використання БГР в колах живлення значно підвищує завадостійкість та надійність обладнання і значно збільшує стійкість обладнання до впливу зовнішніх дестабілізуючих факторів. Далі сигнал прямує на мультиплексор який здійснює комутацію відповідного вимірювального каналу до входу MCU. Мультиплексором управляє мікропроцесор. Невід’ємною частиною мікропроцесорної системи є оперативна та постійна пам'ять, засіб управління та інтерфейс, за допомогою якого здійснюється обмін даними між мікропроцесорною системою та зовнішнім світом.
Дана мікропроцесорна система є завадостійкою і високоточною у вимірюваннях, тому найважливішим показником являється завадостійкість і точність виміряних показань.
Друга структурна схема зображена на рисунку 3.2:
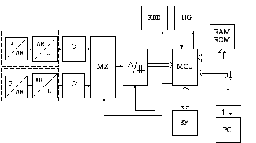
Рисунок 3.2 – Другий варіант реалізації структурної мікропроцесорної ваговимірювальної системи модернізованого дозатора АД-50-РКМ
Дана схема
складається з наступних основних вузлів:
P/U
– тензорезистивний сенсор;
 –
підсилювач сигналу; МХ – мультиплексор;
–
підсилювач сигналу; МХ – мультиплексор;
 – аналогово-цифровий перетворювач
(АЦП); MCU – мікроконтролер; І – інтерфейс
обміну даними; ЗУ – засіб управління;
HG – засіб відображення.
– аналогово-цифровий перетворювач
(АЦП); MCU – мікроконтролер; І – інтерфейс
обміну даними; ЗУ – засіб управління;
HG – засіб відображення.
Принцип дії схеми: по двох каналах проводиться вимірювання ваги, на виході яких після вимірювання утворюється аналогова величина, яка поступає далі на підсилювач сигналу, який застосовують для підсилення малих різниць напруги на фоні синфазної завади. Потім сигнал прямує на мультиплексор який здійснює комутацію відповідного входу до входу АЦП . АЦП здійснює перетворення сигналу відповідно каналу у цифровий код, який передається до мікропроцесора. Управління мультиплексором та АЦП відбувається мікропроцесором. Невід’ємною частиною мікропроцесорної системи є оперативна та постійна пам'ять, засіб управління, засіб відображення та інтерфейс, за допомогою якого здійснюється обмін даними між мікропроцесорною системою та зовнішнім світом.
На рисунку 3.3 наведено третій варіант структурної схеми:
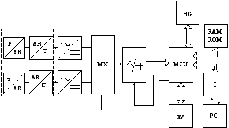
Рисунок 3.3 – Третій варіант реалізації структурної схеми мікропроцесорної ваговимірювальної системи модернізованого дозатора АД-50-РКМ
Позначення на
схемі: P/U
– датчик ваги; ~/= – перетворення змінної
напругу в постійну; МХ– мультиплексор;
 –аналогово-цифровий перетворювач(АЦП);
MCU – мікроконтролер; І – інтерфейс
обміну даними; ЗУ – засіб управління;
RAM – оперативна пам'ять; ROM – постійна
пам'ять; HG – засіб відображення.
–аналогово-цифровий перетворювач(АЦП);
MCU – мікроконтролер; І – інтерфейс
обміну даними; ЗУ – засіб управління;
RAM – оперативна пам'ять; ROM – постійна
пам'ять; HG – засіб відображення.
Принцип дії наведеної схеми полягає в наступному : по двох каналах проводиться вимірювання ваги, на виході яких після вимірювання утворюється аналогова величина (змінна напруга). Після цього змінна напруга перетворюється у постійну, яка поступає далі на мультиплексор. Мультиплексор здійснює комутацію відповідного входу до входу АЦП . АЦП здійснює перетворення сигналу відповідно каналу у цифровий код, який передається до мікропроцесора. Управління мультиплексором та АЦП відбувається мікропроцесором. Через інтерфейс здійснюється обмін даними з зовнішнім світом.
При виборі оптимальної структурної схеми слід враховувати кількісні та якісні характеристики кожної з них, а саме швидкодію, завадостійкість, простоту реалізації, низьку собівартість, точність.
Для того, щоб порівняти вище наведені структурні схеми занесемо основні параметри системи до таблиці і порівняємо (таблицю 3.1).
Таблиця 3.1 – Порівняння структурних схем
|
Параметри |
Схема №1 |
Схема № 2 |
Схема № 3 |
Ідеальна схема |
|
Простота реалізації |
1 |
0 |
0 |
1 |
|
Завадостійкість |
1 |
1 |
0 |
1 |
|
Точність показів |
1 |
0 |
0 |
1 |
|
Собівартість |
0 |
1 |
1 |
1 |
|
Швидкодія |
1 |
0 |
0 |
1 |
|
Σ Е |
4 |
2 |
1 |
5 |
Обрахуємо узагальнений коефіцієнт якості:
 (3.1)
(3.1)
Узагальнений коефіцієнт якості першої схеми:
 .
(3.2)
.
(3.2)
Узагальнений коефіцієнт якості другої схеми:
 .
(3.3)
.
(3.3)
Узагальнений коефіцієнт якості третьої схеми:
 .
(3.4)
.
(3.4)
Виходячи з багатовекторного порівняння можна зробити висновок, що критерій якості першої схеми найвищий серед трьох схем. Тому можна зробити висновок,що для поставленої нами задачі найбільше підходить структурна схема, представлена на рисунку 3.1.
Отже, буде доцільно використати цю схему для побудови електричної принципової схеми досліджуваної розробки.
3.2 Оптимальний варіант структурної схеми
Згідно розрахунків та основних параметрів системи, структура дозатора буде розроблятись за схемою що представлена на рисунку 3.1.
Система побудована за такою схемою (рисунок 3.4), яка має найкращі кількісні та якісні характеристики та задовольнятиме технічним вимогам поставленим в завданні. Крім того частота не піддається різноманітним завадам, на відміну від напруги, що веде до того, що обмін інформацією через інтерфейс може відбуватись на великій відстані.

Рисунок 3.4 – Структурна схема мікропроцесорної ваговимірювальної системи модернізованого дозатора АД-50-РКМ
Дана схема складається з наступних основних вузлів: P/U – первинний перетворювач (тензорезистивний сенсор); U/f – вторинний перетворювач напруги в частоту; БГР– блок гальванічної розв’язки; МХ – мультиплексор; MCU – мікроконтролер; І – інтерфейс обміну даними; ЗУ – засіб управління.
В якості первинних вимірювальних перетворювачів виступають тензодатчики, які перетворюють зусилля (вагу) в аналогову величину (в даному випадку в напругу). В якості вторинних перетворювачів виступають мікросхеми для перетворення сигналу напруги в частоту, при чому відпадає потреба у аналогово-цифровому перетворенні, тому що сигнал одразу після комутації мультиплексором відповідного входу з виходом, сигнал подається на будь який вхід MCU. Перетворений вторинним перетворювачем сигнал частоти з каналів поступає на мультиплексор.
Мультиплексор – це функціональний елемент, який має певну кількість входів і один вихід. Шляхом подачі на відповідний вхід частоти, здійснюється комутація відповідного входу з виходом мультиплексора. Мультиплексор управляються мікроконтролером.
Мікроконтролер або однокристальна мікро-ЕОМ – це інтегральна мікросхема, яка має всі ознаки ЕОМ, а саме: процесор, порти введення і виведення, ОЗУ, ПЗУ та інші функціональні вузли. Він призначений для обробки вимірювальної інформації, здійснює керування інформаційними потоками, забезпечує обмін даними між окремими частинами інформаційно-вимірювальної системи та зовнішніми пристроями.
Інтерфейс – це сукупність апаратних та програмних засобів , норм та правил, за якими здійснюється обмін інформацією. Інтерфейс RS-232 є важливим функціональним вузлом в сучасних ІВС. Інтерфейсом називають сукупність правил, протоколів, апаратного та програмного забезпечення, призначених для обміну даними. З допомогою його інформація, що знімається мікроконтролером, передається на ПК.