

Конспект лекций (Панков) / ЛЕКЦИЯ2
.DOC
Лекция 2
План лекции
-
Следящий электропривод, основные определения и понятия.
-
Принцип действия и блок-схема следящего электропривода.
- Основные типы современного электропривода и тенденции его развития.
Электрический следящий привод (ЭСП) - замкнутая динамическая система, управляющая перемещением объекта регулирования. При этом регулируемая величина с той или иной степенью точности воспроизводит приложенное к системе воздействие.
Блок - схема следящего электропривода представлена на рисунке 0.1:
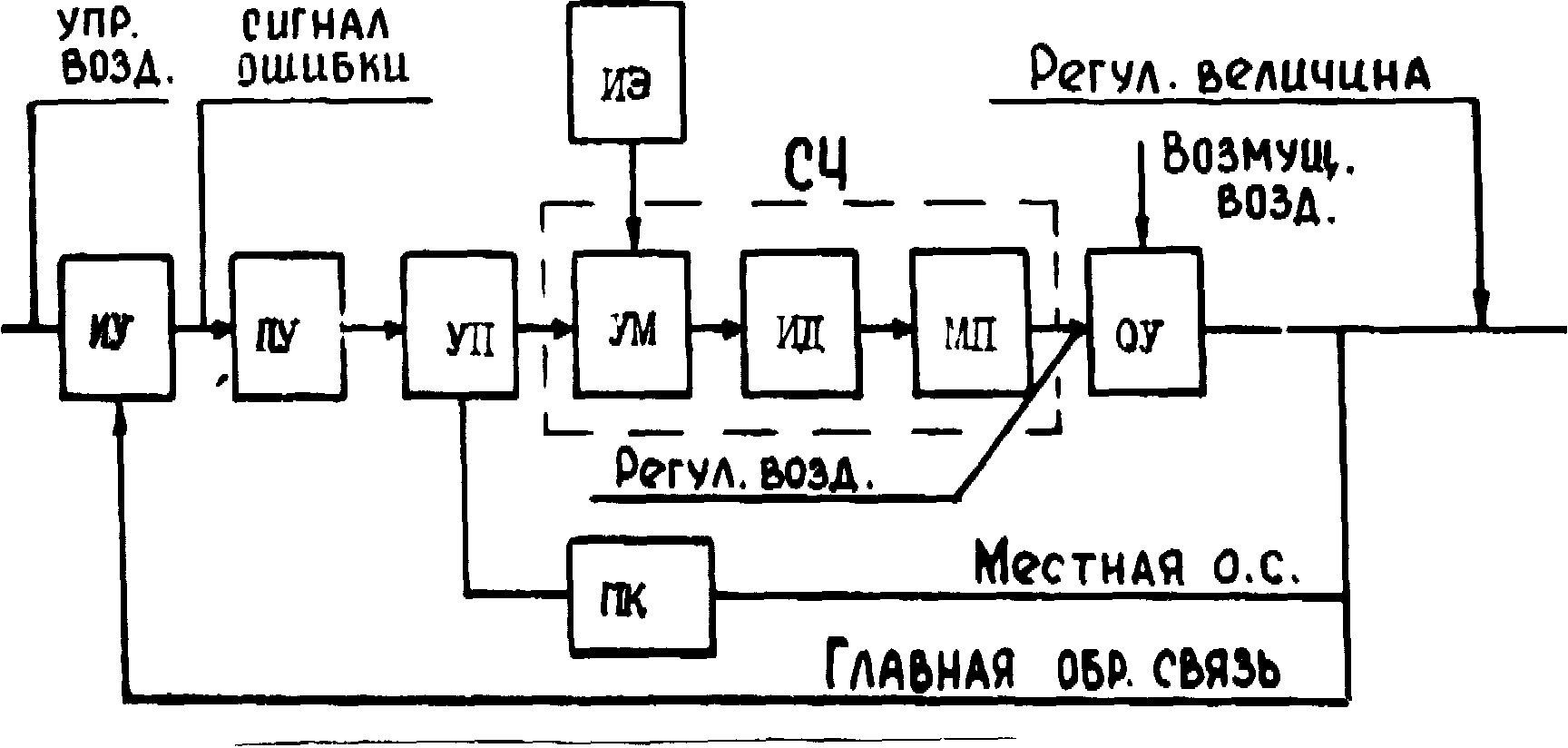
Рис. 0.1 Блок - схема следящего электропривода
ИУ - измерительное устройство;
ПУ - преобразующее устройство;
УП - предварительный усилитель;
УМ - усилитель мощности;
ИЭ - источник энергии;
ИД - исполнительный двигатель;
МП - механическая передача;
ОУ - объект управления;
ПКУ - параллельное корректирующее устройство.
В измерительном устройстве производится сравнение текущего значения регулируемой величины с управляющим воздействием и на основе этого сравнения формируется сигнал ошибки. В измерительном устройстве информация о текущем значении регулируемой величины поступает по каналу главной обратной связи. Схемы измерительного устройства очень разнообразны. В аналоговых ЭСП в измерительных устройствах наиболее часто используются потенциометры, синусно-косинусные вращающиеся трансформаторы, сельсины и другие датчики. В дискретных следящих приводах сигнал ошибки формируется в управляющей вычислительной машине (УВМ) или микроконтроллере. И здесь наиболее часто информация о текущем значении регулируемой величины поступает по каналам главной обратной связи с цифрового датчика.
В преобразующем устройстве преобразуется сигнал ошибки к виду, удобному для дальнейшего использования. В преобразующем устройстве очень часто уменьшается уровень помех и в него включается последовательное корректирующее устройство.
В предварительном усилителе сигнал усиливается по напряжению и мощности до уровня, необходимого для нормального функционирования усилителя мощности. Также здесь производится сложение сигналов, поступающих в преобразующее устройство, и сигнала местной обратной связи.
Силовая часть (силовой агрегат) состоит из усилителя мощности, исполнительного двигателя и механической передачи.
Усилитель мощности управляет потоком энергии, поступающим от источника энергии. В электрических следящих приводах находят применение электромашинные (ограниченно) и различного типа полупроводниковые усилители мощности.
Исполнительный двигатель получает сигнал от усилителя мощности и через редуктор (в некоторых случаях редуктор отсутствует) перемещает объект регулирования. В электрических следящих приводах используются электрические двигатели постоянного тока, переменного тока: двухфазные (до мощностей 200 Вт) и трехфазные асинхронные, а также комбинация: приводной двигатель любого типа и блок электромагнитных муфт.
Перемещение исполнительным двигателем объекта регулирования происходит в направлении уменьшения ошибки электрического следящего привода. Если ошибка равна нулю, то значение регулируемой величины совпадает со значением управляющего воздействия. Но на любой следящий электропривод помимо управляющего воздействия всегда приложены возмущающие воздействия, которые вызывают отклонение регулируемой величины от требуемого значения.
Возмущающие воздействия бывают внешними и внутренними. Внешние возмущающие воздействия действуют на исполнительном валу. К внутренним возмущениям относятся возмущения в виде случайных помех, содержащихся в сигналах; моментные возмущения, появляющиеся при наличии кинематических погрешностей редукторов и т.д.
В настоящее время в различных отраслях техники используются эсп различных типов. К ним относятся приводы с исполнительными коллекторными двигателями постоянного тока, работающими по системам "транзисторный импульсный усилитель - двигатель", "тиристорный управляемый выпрямитель - двигатель с независимым возбуждением" и "электромашинный усилитель - двигатель", а также ЭСП с исполнительными бесконтактными или вентильными двигателями различных типов. Эсп переменного тока с исполнительными асинхронными двух и трехфазными двигателями. Выбор того или иного типа привода определяется общими требованиями, предъявляемыми к проектируемой системе, и традициям существующими в конкретной фирме.
В настоящее время техническое соперничество в использовании различных систем приводов рядом фирм свелось к соревнованию многофазных систем частотного асинхронного ЭСП, на основе преобразователей частоты с использованием полупроводниковых приборов бытовой серии с вентильными двигателями, на базе синхронных машин с возбуждением от постоянных магнитов и реактивных машин. Основным недостатком вентильных приводов является сложность изготовления как самого двигателя, а это, как правило, сложный ротор из постоянных магнитов с большим трудом подвергающихся обработке, так и вопросы намагничивания ротора; механическая прочность ротора, ограничивающая верхний предел частоты вращения. Кроме этого, им присуще относительно низкая индукция в воздушном зазоре при использовании дешевых магнитотвердых материалов и большая стоимость высокоэнергетических постоянных магнитов типа "Самарий - Кобальт". Еще одна, неприятная особенность вентильных приводов - это наличие встроенного датчика положения ротора и обеспечение его надежной работы. Проблематичным является также изготовление дешевого электронного коммутатора, являющегося неотъемлемой частью привода. Синхронные машины с постоянными магнитами (магнитоэлектрические машины) обладают рядом других недостатков: двигатели с постоянными магнитами имеют плохие пусковые свойства, но основным существенным недостатком машин с постоянными магнитами являются трудность регулирования потока возбуждения. Вентильные двигатели применяются, в ЭП небольшой мощности, где нежелательно применение механических коммутаторов (проигрыватели, приборы магнитной записи и др
Наибольшее распространение в промышленности и сельском хозяйстве находят асинхронные двигатели (АД). По сравнению с двигателями постоянного тока они проще в изготовлении и эксплуатации, надежнее, имеют относительно меньшие массу, размеры и стоимость. АД имеют высокий КПД и надежность, хорошие эксплуатационные свойства, просты в обслуживании, поэтому применение их в ЭСП весьма перспективно.
Достоинства АД, связанные с его, низкой себестоимостью, малой материалоемкостью, трудоемкостью, с малыми затратами на обслуживание, высокой технологичностью - общеизвестны. АД не имеет ограничений на максимальную частоту вращения. В качестве управляёмых двигателей могут быть использованы как, широко распространенные двигатели единых серий, так и специально разработанные двигатели, которые позволяют получить наиболее высокие характеристики.
Разработка ЭП, включающего положительные характеристики асинхронного короткозамкнутого электродвигателя, а именно: простоту и технологичность конструкции, надежность эксплуатации, наиболее низкие, массогабаритные показатели и стоимость, но при этом позволяющего плавно с заданным законом регулировать частоту вращения ротора в широком диапазоне, как вниз, так и вверх от основной (синхронной ) частоты вращения - задача на сегодняшний день весьма актуальная.