

2. Формирование закона управления, обеспечивающего желаемые значения корней характеристического уравнения
Структурная схема типового объекта в отсутствие возмущающего воздействия имеет вид

Математическое описание объекта, полученное в результате поэлементного описания, имеет вид:
 (2.1)
(2.1)
В матричной форме систему (2.1) можно представить в виде
![]()
![]() , (2.2)
, (2.2)
здесь
![]() ,
, ,
, ,
,![]() .
.
Передаточная функция объекта имеет вид
![]() (2.3).
(2.3).![]()
Выбор
переменных состояния
![]() не является единственно возможным.
Переменные состояния могут быть выбраны
множеством способов. Любая замена
вектора
не является единственно возможным.
Переменные состояния могут быть выбраны
множеством способов. Любая замена
вектора![]() на вектор
на вектор![]()
![]() , (2.4)
, (2.4)
![]() где
где![]() -
неособая матрица
-
неособая матрица![]() приводит к новому матричному уравнению
приводит к новому матричному уравнению
![]()
![]() , (2.5)
, (2.5)
где
![]() . (2.6)
. (2.6)
Выберем
переменные состояния так, чтобы в системе
(2.5) матрица
![]() соответствовала системе дифференциальных
уравнений, записанной в первой нормальной
форме Коши, т.е., чтобы матрица
соответствовала системе дифференциальных
уравнений, записанной в первой нормальной
форме Коши, т.е., чтобы матрица![]() имела вид
имела вид
 . (2.7)
. (2.7)
Для этого от передаточной функции (2.3) перейдем к дифференциальному уравнению объекта
![]() ,
,
здесь
![]() или
или
![]() , (2.8)
, (2.8)
![]() .
Заметим, что характеристическое уравнение
объекта, соответствующее передаточной
функции (2.3) и дифференциальному уравнению
(2.8), имеет вид
.
Заметим, что характеристическое уравнение
объекта, соответствующее передаточной
функции (2.3) и дифференциальному уравнению
(2.8), имеет вид
![]()
или
![]() (здесь
(здесь![]() ). (2.9)
). (2.9)
Выберем переменные состояния следующим образом:
![]() .
.
При выбранных переменных система дифференциальных уравнений объекта примет вид
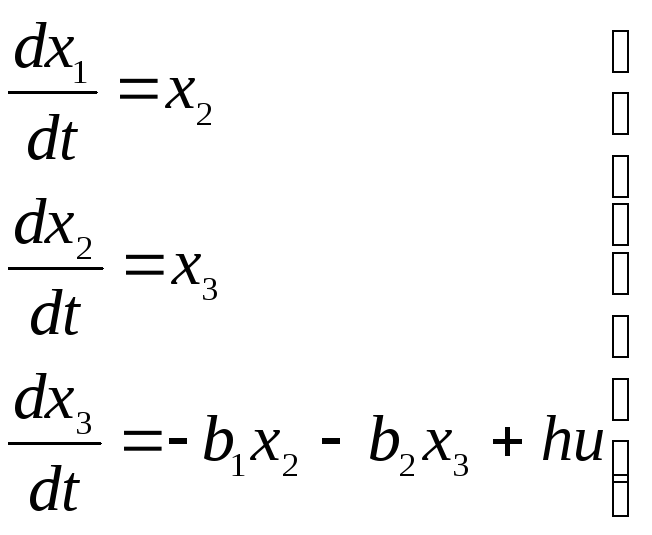 (2.10).
(2.10).
При этом матричное уравнение (2.5) имеет матрицы
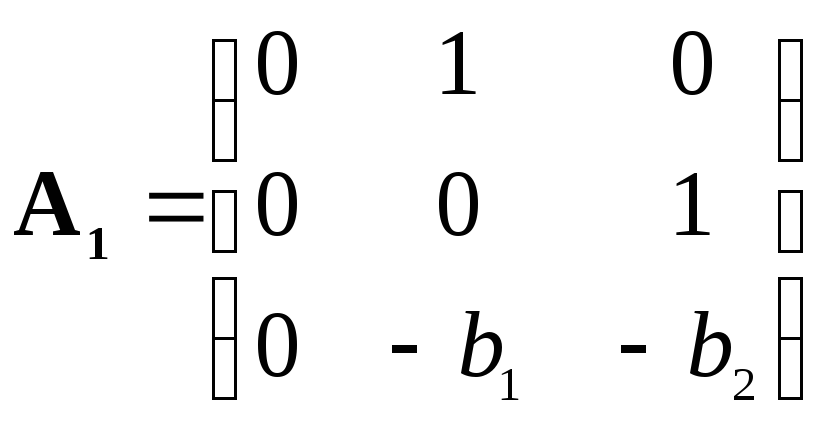 ,
, ,
,![]() .
.
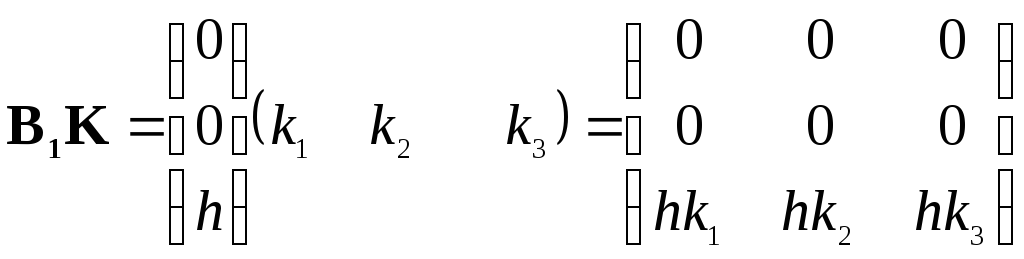
Сформируем
управление
![]() :
:
![]() (2.11)
(2.11)
так, чтобы замкнутая система имела заранее заданные корни характеристического уравнения.
Имеем для замкнутой системы
![]() ,
,
![]() ,
,
и тогда, исключая второе уравнение, получим матричное уравнение замкнутой системы
![]() .
.
Рассмотрим
собственную матрицу замкнутой системы
![]() .
Имеем
.
Имеем
 и тогда
и тогда
![]()
 . (2.12)
. (2.12)
Пусть
желаемые корни (в общем случае
комплексно-сопряженные) равны
![]() .
Тогда по теореме Виета характеристическое
уравнение может быть представлено в
виде
.
Тогда по теореме Виета характеристическое
уравнение может быть представлено в
виде
![]() , (2.13)
, (2.13)
здесь
![]() определяются по заданным значениям
определяются по заданным значениям![]() .
Таким образом, необходимо, чтобы
характеристическое уравнение замкнутой
системы имело заданные коэффициенты.
Рассмотрим вопрос, как связаны коэффициенты
.
Таким образом, необходимо, чтобы
характеристическое уравнение замкнутой
системы имело заданные коэффициенты.
Рассмотрим вопрос, как связаны коэффициенты![]() с
элементами матрицы (2.12). Сравнивая вид
матрицы
с
элементами матрицы (2.12). Сравнивая вид
матрицы![]() (2.7) с характеристическим уравнением
(2.9), можно видеть, что элементы последней
строки матрицы
(2.7) с характеристическим уравнением
(2.9), можно видеть, что элементы последней
строки матрицы![]() являются коэффициентами характеристического
уравнения Применяя этот результат к
матрице синтезированной системы (11) и
характеристическому уравнению (2.13),
получим
являются коэффициентами характеристического
уравнения Применяя этот результат к
матрице синтезированной системы (11) и
характеристическому уравнению (2.13),
получим
![]() ,
,
откуда значения коэффициентов, задающих требуемый закон управления определятся зависимостями
![]() . (2.14)
. (2.14)
Зависимости
(2.14) определяют коэффициенты обратных
связей по переменным состояния в базисе
![]() .
Для окончательного решения задачи
необходимо пересчитать эти коэффициенты
для базиса
.
Для окончательного решения задачи
необходимо пересчитать эти коэффициенты
для базиса![]() .
.
Имеем
![]() ,
,![]() ,
,
![]() ,
,![]() ,
,
откуда следует, что
![]() ,
,![]() .
(2.15)
.
(2.15)
Для того, чтобы
получить аналогичную зависимость для
переменной
![]() рассмотрим второе уравнение системы
(2.1)
рассмотрим второе уравнение системы
(2.1)
![]() .
.
Приведем его к виду
![]() . (2.16)
. (2.16)
Так
как
![]() и, следовательно
и, следовательно![]() ,
то из (2.16) получим
,
то из (2.16) получим
![]()
и
![]() . (2.17)
. (2.17)
Подставляя (2.15), (2.17) в уравнение, определяющее управление (2.11), получим
 (2.18)
(2.18)
где
![]() ,
,![]() ,
,![]() .
.
3.Расчет переходного процесса синтезированной сау
Математическое описание синтезированной системы состоит из системы уравнений разомкнутого объекта (2.1) и уравнения (2.18). Расчет переходного процесса на единичное ступенчатое входное воздействие имеет целью проверку выполнения предъявляемых к системе требований по времени регулирования и перерегулированию. Он может проводиться либо непосредственным численным интегрированием системы уравнений (2.1), (2.18) либо посредством определения с помощью этих уравнений передаточной функции замкнутой синтезированной системы, определением аналитического выражения для переходного процесса и его расчетом по полученной формуле.
Литература
1.В.А. Бесекерский, Е.П. Попов. Теория систем автоматического регулирования. -М.: Наука, 1975.- 768с.
2. Д.В. Васильев, В.Г. Чуич. Системы автоматического управления (примеры расчета).- М.: Высшая школа, 1967.- 418с.
3. Н.Н. Иващенко Автоматическое регулирование.- 4 изд.- учебник для вузов.- М.: машиностроение, 1976.- 736с.
4. Техническая кибернетика. Устройства и элементы систем автоматического регулирования. Кн.1/ Под ред. В.В. Солодовникова.- М.: Машиностроение, 1973.- 680с.
5. Ю.И. Топчеев, А.П. Цыпляков. Задачи по теории автоматического регулирования. учебное пособие для вузов.- М.: Машиностроение, 1977.- 592с.
6. Техническая кибернетика. Теория автоматического регулирования. Кн.2/ Под ред. В.В. Солодовникова.- М.: Машиностроение, 1967.- 682с.
Рассмотрено за заседании
кафедры САУ. Протокол № 6
от 28.02.02
Заведующий кафедрой Н.В. Фалдин