

5 Моделирование в программе «VisSim»
Оценку качества управления процессом металлообработки целесообразно выполнять методом математического моделирования в программе «Visim». Данная оценка производится по показателям качества при переходных процессах, которые возникают при изменении управляющих и возмущающих воздействий. Управляющим воздействием в электроприводах «управляемый преобразователь-электродвигатель» является задающее напряжение, в зависимости от которого происходит пуск, торможение и реверс двигателя. Возмущающим воздействием, в частности, является изменение по величине или направлению момента статических сопротивлений.
Структурная схема электропривода с отрицательной обратной связью по скорости в относительных единицах приведена на рисунке 5.1.
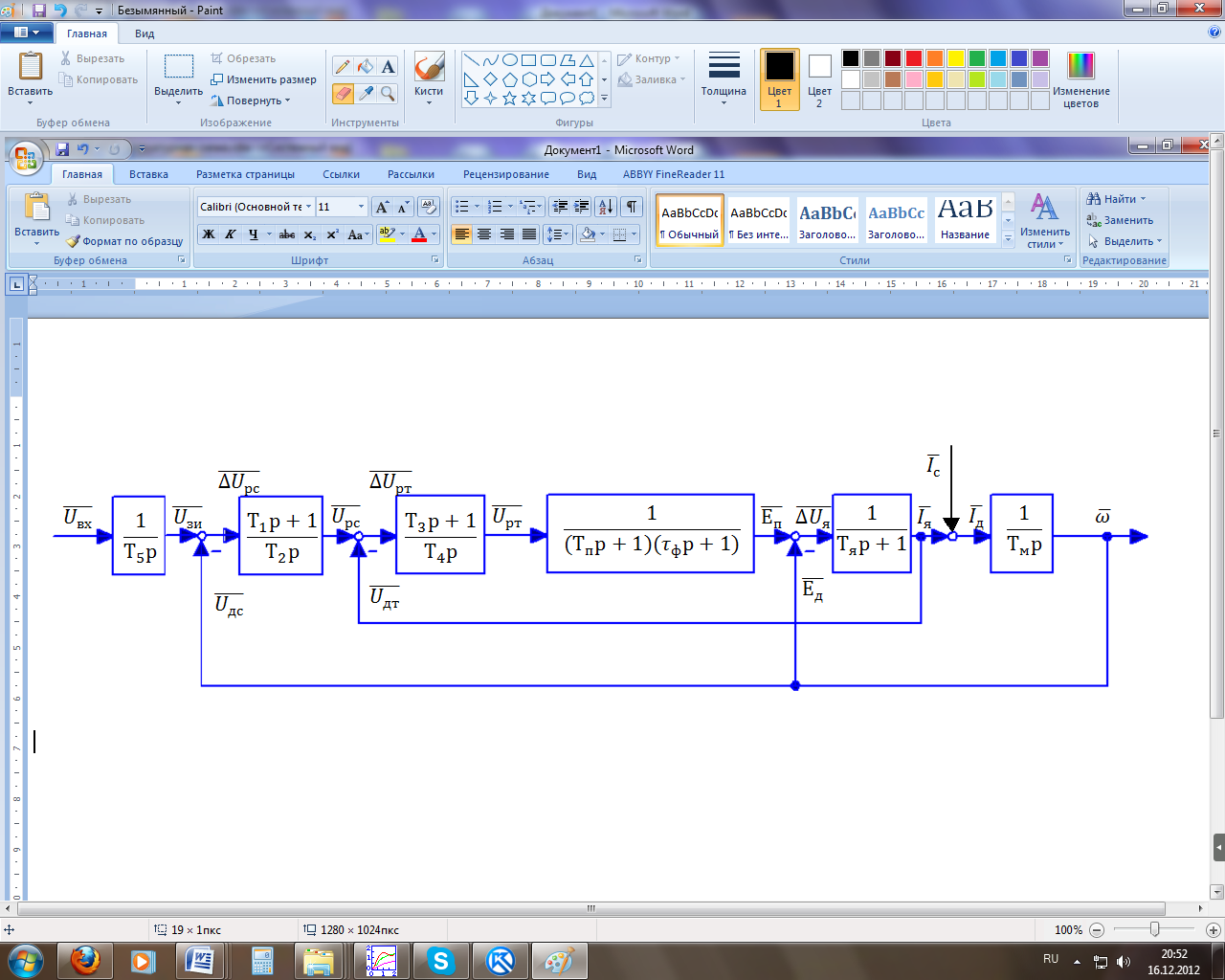
Рисунок 5.1 – Структурная схема электропривода подчиненного регулирования с отрицательной обратной связью по скорости в относительных единицах
Для моделирования необходимо перевести параметры электропривода в относительные единицы.
Для этого определим необходимые параметры двигателя.
Мощность электродвигателя Вт, рассчитывается по формуле:
![]() (5.1)
(5.1)
![]()
Номинальный ток электродвигателя А, определяется по формуле:
![]() (5.2)
(5.2)
где η – КПД электродвигателя, η=0,9;
Uном – номинальное напряжение питания, Uном=110В.
![]()
Номинальная частота вращения, об/мин определяется по формуле:
![]() (5.3)
(5.3)
![]()
Скорость при номинальной частоте вращения, мм/мин:
![]() (5.4)
(5.4)
![]()
Рассчитаем электромагнитную постоянную времени Тм и якорную постоянную времени Тя.
Сопротивление якорной цепи:
![]() (5.5)
(5.5)
где Uн – номинальное напряжение, Uн=110 В;
kФном – номинальный поток, определяется по формуле:
![]() (5.6)
(5.6)
![]()
ωном – номинальная угловая скорость, определяется по формуле:
![]() (5.7)
(5.7)
![]()
RVT – сопротивление одновременно работающих транзисторных ключей:
![]() (5.8)
(5.8)
где ∆UVT – падение напряжение в транзисторном ключе, ∆UVT≈4 В;
![]()
RVD – сопротивление одновременно работающих диодов выпрямителя:
![]() (5.9)
(5.9)
где ∆UVD – падение напряжение в диоде, ∆UVD≈0,5 В;
![]()
![]()
Механическая постоянная двигателя определяется:
 (5.10)
(5.10)
где
![]() –
приведенный момент инерции консоли:
–
приведенный момент инерции консоли:
![]()
![]()
![]()
Электромагнитную постоянную двигателя найдём как:
![]() (5.11)
(5.11)
![]()
Запаздывание преобразователя:
![]() (5.12)
(5.12)
где
![]() – частота
ШИМа, примем
– частота
ШИМа, примем
![]() =5000Гц.
=5000Гц.
![]()
Постоянная фильтра:
![]() (5.13)
(5.13)
![]()
Ток короткого замыкания Iк.з., А:
![]() (5.14)
(5.14)
![]()
Момент короткого замыкания:
![]() (5.15)
(5.15)
![]()
Уставка токоограничения рассчитывается по формуле:
![]() (5.16)
(5.16)
где Fкз – усилие при коротком замыкании:
![]() (5.17)
(5.17)
![]()
![]()
Угловая скорость холостого хода:
![]() (5.18)
(5.18)
![]()
Базовое напряжение датчика скорости:
![]() (5.19)
(5.19)
где кдс - коэффициент передачи датчика скорости:
![]() (5.20)
(5.20)
где Uпит.су – напряжение питания системы управления, Uпит.су=15 В;
ωmax– максимальная угловая скорость:
![]() (5.21)
(5.21)
![]()
![]()
![]()
Базовое напряжение датчика тока:
![]() (5.22)
(5.22)
где кдт - коэффициент передачи датчика тока:
![]() (5.23)
(5.23)
где Uпит.су – напряжение питания системы управления, Uпит.су=15 В;