

Решение.
В
точке А балка АВ жестко заделана (связь
– жесткая заделка). Такая связь дает
множество сил, действующих на заделанный
конец балки. Но согласно основной теореме
статики произвольная система сил
приводится к одной силе (главному
вектору)
![]() А
и одной
паре – главному моменту МА.
Главный вектор заменим его составляющими
А
и одной
паре – главному моменту МА.
Главный вектор заменим его составляющими
![]() А
и
А
и
![]() А,
направленными произвольно по осям Ах
и Ау соответственно (рис.16). С учетом
этого в заделке имеем две силы реакции
А,
направленными произвольно по осям Ах
и Ау соответственно (рис.16). С учетом
этого в заделке имеем две силы реакции
![]() А
и
А
и
![]() А
и момент
МА,
направление которого указываем тоже
произвольно. В точке В связью является
нить, к противоположному концу которой
прикреплен груз Q,
вес которого задан. Поэтому реакция
нити равна силе Q
и направлена от точки В по нити.
Неизвестными являются силы
А
и момент
МА,
направление которого указываем тоже
произвольно. В точке В связью является
нить, к противоположному концу которой
прикреплен груз Q,
вес которого задан. Поэтому реакция
нити равна силе Q
и направлена от точки В по нити.
Неизвестными являются силы
![]() А
и
А
и
![]() А
и момент
МА.
Для равновесия произвольной плоской
системы сил необходимо и достаточно,
чтобы суммы проекций всех сил на оси
координат равнялись нулю и чтобы сумма
моментов всех сил относительно точки
А тоже равнялась нулю, то есть
А
и момент
МА.
Для равновесия произвольной плоской
системы сил необходимо и достаточно,
чтобы суммы проекций всех сил на оси
координат равнялись нулю и чтобы сумма
моментов всех сил относительно точки
А тоже равнялась нулю, то есть
![]() ; (8)
; (8)
 ;
;
![]() .
.

Рис. 16
Из (8) следует
![]() ;
;
![]() ;
;
![]() .
.
После подстановки в эти уравнения численных значений Р, Q, q, M, , , заданных в условии задачи, получим значения неизвестных:
ХА=101/2 +51/2=7,5 кН;
YА=2
4/2 – 10 ![]() /2
– 5
/2
– 5![]() /2
= - 8,99 кН;
/2
= - 8,99 кН;
МА=216/8
– 10
4/2![]() /2
+ 3 – 54
/2
+ 3 – 54![]() /2=
-27,6 кНм.
/2=
-27,6 кНм.
Задача С2. Определение реакций опор и сил в стержнях плоской фермы.
Дано: Р1 = 20 Н, Р2 = 10 Н, = 450 , = 450 , а = 1 м.
Определить усилия в стержнях фермы

Рис.17
Решение.
Простая статически определимая ферма (рис.17) составлена из n узлов и s стержней, число которых связано соотношением s = 2n - 3.
Стержень
14 (СА) не принадлежит ферме, но с его
помощью ферма крепится к опоре А, то
есть для фермы стержень 14 является
связью. В точке В ферма связана неподвижным
цилиндрическим шарниром с другим телом.
Поэтому, освободив ферму от связей,
получим свободное твердое тело, на
которое действуют активные силы
![]() ,
,![]() и силы реакций связей
и силы реакций связей![]() ,
,![]() ,
,![]() ,
причем
,
причем![]() направлена вдоль стержня СА, а
направлена вдоль стержня СА, а![]() ,
,![]() -
параллельны осям координат (рис.18 и
19). Определим эти неизвестные силы. Для
этого, считая ферму абсолютно твердым
телом, составим уравнение равновесия
для системы сил, приложенных к ферме
как для произвольной плоской системы
сил:
-
параллельны осям координат (рис.18 и
19). Определим эти неизвестные силы. Для
этого, считая ферму абсолютно твердым
телом, составим уравнение равновесия
для системы сил, приложенных к ферме
как для произвольной плоской системы
сил:
1)
![]() =
ХВ
–
RA
+ P2sin
= 0;
=
ХВ
–
RA
+ P2sin
= 0;
2)
![]() =YB
+
P2cos
P1
= 0; (9)
=YB
+
P2cos
P1
= 0; (9)
3)
![]() = RAa
P2sina
P13a
+ P2cos
2a
= 0
= RAa
P2sina
P13a
+ P2cos
2a
= 0
Из третьего уравнения системы (9) найдем
RA=P2sin
+ P13
P22cos=10![]() /2
+203
102
/2
+203
102![]() /2
= 53 Н.
/2
= 53 Н.
Из второго уравнения (9) найдем YВ
YВ=Р2сosP1=10![]() /2
20 = 12,9
Н.
/2
20 = 12,9
Н.
Из первого уравнения (9) найдем ХВ
ХВ
= RA
+ P2sin=
53
+ 10![]() /2
= 46
Н.
/2
= 46
Н.
Усилия в стержнях найдем методом вырезания узлов. Для этого каждый раз будем вырезать тот узел, к которому приложено не более двух неизвестных усилий в стержнях фермы (ферма плоская). Таким узлом является узел В (рис.18). Неизвестными являются усилия R1, R4 в первом и четвертом стержнях соответственно. Имеем плоскую систему сходящихся сил. Составим уравнения равновесия:
1)
![]() ;
;
2)
![]() .
.

Рис. 18
Решая эти уравнения относительно R1 и R4, получим:
R1 = YB = 12,9 Н;
R4 = XB = 46 Н.
Теперь вырежем узел А. К этому углу подходят три стержня – первый, второй и третий (рис. 19). Усилие в первом стержне определено из рассмотрения узла В. Таким образом, неизвестными усилиями являются усилия R2 и R3 в стержнях втором и третьем соответственно. Для определения этих неизвестных составим уравнение равновесия как для плоской системы сходящихся сил:
1)
![]() ;
;
2)
![]() .
.

Рис. 19
Откуда получим:
R3= R11/sin = 12,292/2 = 18,4 Н;
R2=
RA
R3
cos=
53,0718,4![]() /2
= 40,2 Н.
/2
= 40,2 Н.
Вырежем узел III (рис.20). Неизвестными являются усилия R5 и R6 в стержнях 5 и 6 соответственно. Уравнения равновесия:
1) R2+R6=0;
2) R5=0.
Откуда: R5 = 0, R6 = R2 = 40,2 Н.

Рис. 20
Вырежем узел IV. Неизвестными являются усилия R7 и R8 (рис. 21) Уравнения равновесия:
1) R4 R3cos+R7cos+R8=0;
2) R3sin+R5+R7sin=0,
oткуда
R7= R3= 18,4 Н;
R8=2R3cos+R4=36,8![]() /2+(46)
=
20,02 Н.
/2+(46)
=
20,02 Н.

Рис. 21
Вырежем узел VI (рис. 22). Неизвестными являются усилия R9 и R12. Уравнения равновесия
1) R8+R12=0;
2) R9=0,
oткуда получаем:
R9=0;
R12 = R8 = 20,02 Н.

Рис. 22
Вырежем узел V (рис.23). Неизвестными являются усилия R10 и R11. Уравнения равновесия
1) R6 R7cos+R11+R10cos+P2sin=0;
2) R7sin R9 R10sin+P2cos=0,
откуда
R10= P2 R7= 28,4 Н;
R11=R6+R7cos R10cos P2sin = 40 Н.

Рис. 23
Усилия в стержне 13 определим, вырезав узел VII (рис.24). Уравнения равновесия
1) R12 R10cos = 0;
2) R13 + R10sin - Р1 = 0.
Из второго уравнения получим усилие в стержне 13:
R13=
R10sin
+ Р1
=28,4![]() /2
+ 20 = 0,08 Н.
/2
+ 20 = 0,08 Н.

Рис.24
Из первого уравнения получим тождество, как то и должно быть, то есть
20,02
- 28,4![]() /2=0.
/2=0.
Это свидетельствует о правильности решения.
Указание: при вырезании узлов усилия в стержнях рекомендуется направлять от узла.
Задача С3. Определение реакций опор составной конструкции (система двух тел).
Дано: Р = 100 Н, Q = 30 Н, q = 5 Н/м, M = 10 Нм, = 900 , = 600 , = 300.
Определить реакции опор А и В и в шарнире С.

Рис. 25
Решение.
Система состоит из двух балок АС и ВС, соединенных друг с другом внутренней связью (неподвижным цилиндрическим шарниром) в точке С. Один конец балки АС в точке А закреплен с помощью жесткой заделки, а балка ВС в точке В опирается на каток. Поэтому после освобождения системы двух тел в точках А и В от связей получим свободное твердое тело, изображенное на рис. 26, а разделив его в точке С, получим свободное твердое тело, изображенное на рис.27.
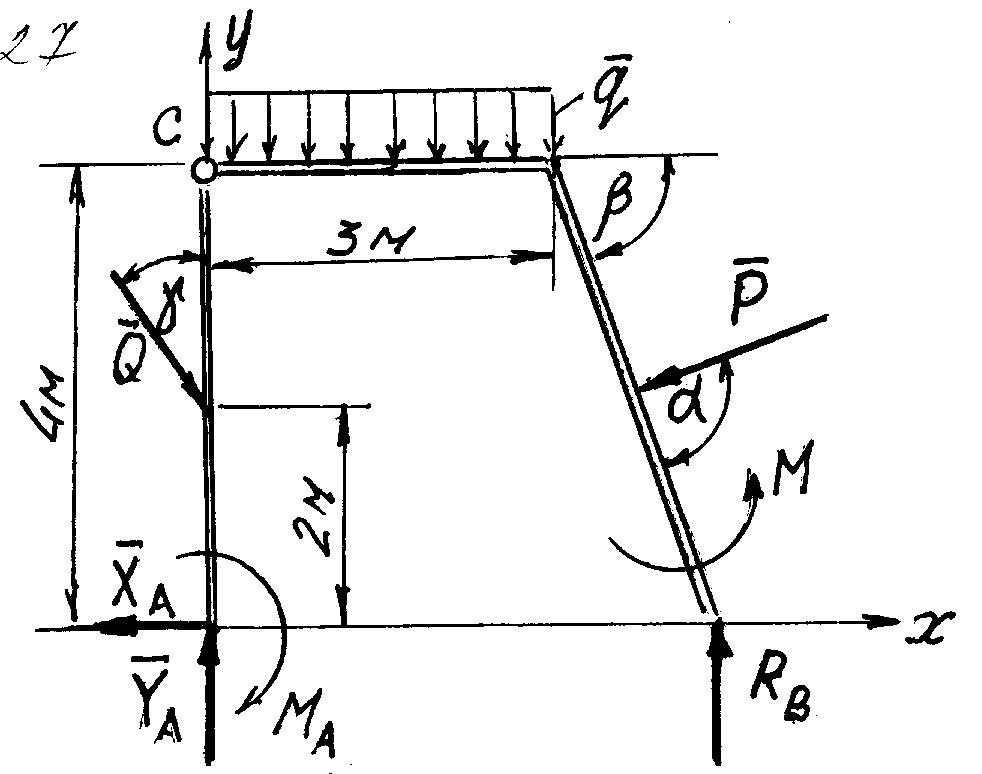

Рис.26 Рис.27
Неизвестными являются силы ХА, YА, RВ, ХС, YС и момент МА. Всего 6 неизвестных. Следовательно, нужно составить 3 уравнения равновесия произвольной плоской системы сил, изображенной на рис.26 и 3 уравнения для системы рис.27. Получим систему шести алгебраических уравнений относительно шести неизвестных:
1)
![]() =ХА+Qsin
Psin=0;
=ХА+Qsin
Psin=0;
2)
![]() =YA
Qcos
q3
Pcos
+RB=0;
=YA
Qcos
q3
Pcos
+RB=0;
3)
![]() =Qsin2
MAq31,5
+ Psin2
=Qsin2
MAq31,5
+ Psin2
Рcos(3+2ctg)+M+RB(3+4ctg)=0;
4)
![]() =XA+Qsin+XC=0;
=XA+Qsin+XC=0;
5)
![]() =YAQsin+YC=0;
=YAQsin+YC=0;
6)
![]() =
XA4+Qsin2MA=0.
=
XA4+Qsin2MA=0.
Из первого уравнения получим ХА:
ХА=
Рsin
+ Qsin
= 100![]() /2
+ 301/2
= -71,6 Н.
/2
+ 301/2
= -71,6 Н.
Из четвертого уравнения получим ХС:
ХС=ХА Qsin= 71,6 301/2= 86,6 Н.
Из шестого уравнения получим МА:
МА= ХА4+2Qsin = 71,64 +2301/2= 316,4 Нм.
Из третьего уравнения найдем RВ:
RB=1/(3+4ctg)[2Qsin+MA+4,5q2Psin+Pcos(3+2ctg)M]== 74 Н.
Из второго уравнения найдем YА:
YA=Qcos+q3+PcosRB= 16,9 Н.
Из пятого уравнения найдем YС:
YС=Qcos YA = 8,9 Н.
Проверка:
![]() =
ХA4
MA+Qsin23q1,5Psin2
-Pcos(3+2/3)+M+RB(3+4/3)
=
=
ХA4
MA+Qsin23q1,5Psin2
-Pcos(3+2/3)+M+RB(3+4/3)
=
= 403+403 = 0.
Задача С 4. Определение реакций опор твердого тела
Дано: Q = 50 Н, F = 20 Н, = 600, = 450, R = 0,5м, r = 0,2 м.
Определить силу Р и реакции подшипников А и В.

Рис. 28
Решение.
Подшипники
представляют связь, которая называется
неподвижный цилиндрический шарнир с
осью, совпадающей с координатной осью
Ау. Трение не учитывается. Поэтому силы
реакции этих связей представим в виде
составляющих, параллельных осям Ах и
Аz
в точках А и В – это силы
![]() ,
,![]() ,
,![]() ,
,![]() (рис.28). Следовательно, всего неизвестных
пять: Р, ХА,
ZA,
XB,
ZB.
Учитывая,
что все силы расположены в плоскостях
перпендикулярных оси Ау, получим пять
уравнений равновесия сил и моментов:
(рис.28). Следовательно, всего неизвестных
пять: Р, ХА,
ZA,
XB,
ZB.
Учитывая,
что все силы расположены в плоскостях
перпендикулярных оси Ау, получим пять
уравнений равновесия сил и моментов:
1)![]() =
ХА+Рсos+XBFcosQcos=0;
=
ХА+Рсos+XBFcosQcos=0;
2)![]() =ZAPsin+ZB+Fsin+Qsin=0;
=ZAPsin+ZB+Fsin+Qsin=0;
3)![]() =Psin2+ZB3+Fsin5+Qsin5=0;
=Psin2+ZB3+Fsin5+Qsin5=0;
4)![]() =Pcosr
+FR
QR=0;
=Pcosr
+FR
QR=0;
5)![]() =Pcos2XB3+Fcos5+Qcos5=0.
=Pcos2XB3+Fcos5+Qcos5=0.
Анализируя эти уравнения, видим, что одну неизвестную содержит только четвертое уравнение. Поэтому последовательность решения следующая. Из четвертого уравнения находим Р:
P=(1/(rcos))(QR - FR)=(12/(0,21))(50-20)1/2= 150 Н.
Из пятого уравнения найдем ХВ:
ХВ=(1/3)(2Pcos+5Fcos+5Qcos)=0,33(21500,5+520![]() /2
+5500,5)=15
Н.
/2
+5500,5)=15
Н.
Из первого уравнения найдем ХА:
XA=
Pcos
XB+Fcos+Qcos=
1500,5
15 +20![]() /2
+ 500,5=
51
Н.
/2
+ 500,5=
51
Н.
Из третьего уравнения найдем ZB:
ZB=(1/3)(2Psin5Fsin5Qsin)=(1/3)(2150![]() /2520
/2520![]() /2550
/2550![]() /2)
==8,9
Н.
/2)
==8,9
Н.
Из второго уравнения найдем ZA:
ZA=PsinZBFsinQsin=150![]() /2
+8,920
/2
+8,920![]() /2
50
/2
50![]() /2
= 81,4Н.
/2
= 81,4Н.
Проверка:
![]() =
1500,50,2+200,5500,5
= 0.
=
1500,50,2+200,5500,5
= 0.