

ЛЕКЦИИ ТЕОРМЕХ / Лек9Д(през)
.docЛЕКЦИЯ 9Д
ДИНАМИКА СФЕРИЧЕСКОГО И СВОБОДНОГО ДВИЖЕНИЯ ТВЁРДОГО ТЕЛА
-
Кинетические моменты твёрдого тела относительно неподвижной точки и координатных осей при его сферическом движении.
-
Дифференциальные уравнения сферического движения твёрдого тела (динамические уравнения Эйлера).
-
Дифференциальные уравнения движения свободного твёрдого тела.
-
Понятие о гироскопе. Гироскоп с тремя степенями свободы.
1. Кинетические моменты твёрдого тела относительно неподвижной точки и координатных осей при его сферическом движении
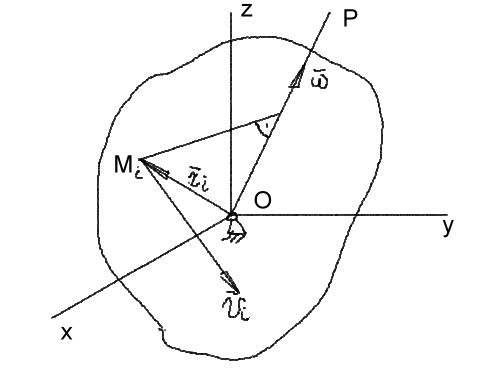
Кинетический момент твёрдого тела, совершающего сферическое движение точки, определяется по общей формуле
![]() (6.1)
(6.1)
так как
![]() (6.2)
(6.2)
где
![]() - вектор угловой скорости, направленный
по мгновенной оси вращения ОР,
- вектор угловой скорости, направленный
по мгновенной оси вращения ОР,
![]() -
радиус-вектор т. Мi
-
радиус-вектор т. Мi
|
|
|
Рисунок 6.1 |
Подставим уравнение (6.2) в уравнение (6.1):
![]() (6.3)
(6.3)
Воспользуемся формулой для двойного векторного произведения
![]()
![]()
так как
![]() ,
а так же
,
а так же
![]() ,
,
то
![]() (6.4)
(6.4)
Определим кинетический момент тела относительно оси х, проходящей через т.О, как проекцию Lо на ось х.
![]()
После соответствующих преобразований, получим:
![]()
здесь
![]() - момент инерции тела относительно оси
х,
- момент инерции тела относительно оси
х,
![]() - центробежный
момент инерции тела относительно осей
х и у;
- центробежный
момент инерции тела относительно осей
х и у;
![]() - центробежный
момент инерции тела относительно осей
z
и x.
- центробежный
момент инерции тела относительно осей
z
и x.
П одставляя
эти значения в выражение, определяющее
Lx,
получаем формулы для вычисления
кинетических моментов тела, совершающего
сферическое движение относительно оси
х,
и по аналогии относительно осей y
и z:
одставляя
эти значения в выражение, определяющее
Lx,
получаем формулы для вычисления
кинетических моментов тела, совершающего
сферическое движение относительно оси
х,
и по аналогии относительно осей y
и z:
![]()
![]() (6.5)
(6.5)
![]()
Если за оси координат приняты главные оси инерции в неподвижной т.О, то центробежные моменты инерции тела относительно этих осей равны нулю, то есть
![]()
![]()
![]()
Тогда уравнения (6.5) принимают вид
![]()
![]()
![]() (6.6)
(6.6)
2. Дифференциальные уравнения сферического движения твёрдого тела (динамические уравнения Эйлера)
При сферическом движении твёрдого тела его кинетический момент Lo относительно неподвижной точки О изменяется согласно уравнению
 (6.7)
(6.7)
Свяжем с движущимся
телом подвижные оси координат Ох1y1z1,
обозначив орты этих осей
![]()
Разложим вектор Lo на составляющие, имеющие направление осей х1, у1, z1.
![]()
|
|
|
Рисунок 6.2 |

Определим производную
![]() ,
учитывая, что орты
,
учитывая, что орты
![]() - переменные векторы.
- переменные векторы.
![]() (а)
(а)
Производные единичных ортов по времени можно выразить по формулам из кинематики
![]()
![]()
![]()
Пользуясь этими формулами, преобразуем первую сумму в правой части равенства (а)
![]()

![]()
Подставим это выражение в равенство (а)

![]()
Если сгруппировать
члены полученного выражения по единичным
ортам
![]() ,
где множители при ортах представляют
собой проекции вектора
,
где множители при ортах представляют
собой проекции вектора
![]() на подвижные оси координат
на подвижные оси координат
![]() ,
и воспользоваться уравнением (6.7), получим
,
и воспользоваться уравнением (6.7), получим
![]()

![]() (6.8)
(6.8)
![]()
Если за подвижные оси координат приняты главные оси инерции тела в т. О, то кинетические моменты тела относительно этих осей определяются по формулам (6.6) и тогда окончательно
![]()

![]() (6.9)
(6.9)
![]()
где
![]() – моменты инерции тела относительно
его главных осей инерции в т.О;
– моменты инерции тела относительно
его главных осей инерции в т.О;
![]() - главные моменты
внешних сил, приложенных к телу,
относительно этих осей;
- главные моменты
внешних сил, приложенных к телу,
относительно этих осей;
![]() - проекции вектора
угловой скорости тела ω
на оси
- проекции вектора
угловой скорости тела ω
на оси
![]() Их можно определить:
Их можно определить:
![]()

![]()
![]()
где
![]() - углы Эйлера.
- углы Эйлера.
Дифференциальные уравнения (6.9) сферического движения твёрдого тела называются динамическими уравнениями Эйлера. Интегрирование этих уравнений связано с большими трудностями. Поэтому рассматриваются только частные случаи сферического движения.
3. Дифференциальные уравнения движения свободного твёрдого тела.
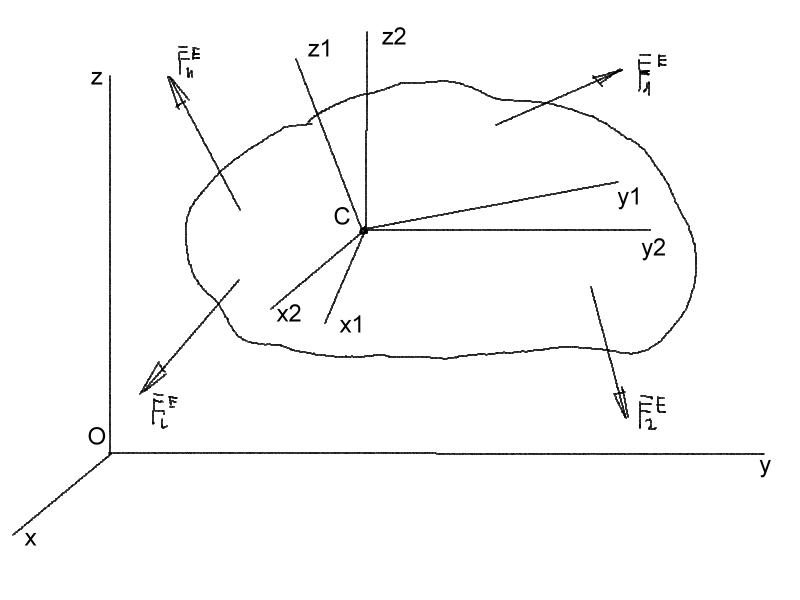
Движение свободного твёрдого тела можно рассматривать как совокупность двух его движений: поступательного вместе с центром масс и сферического вокруг центра масс.
Рассмотрим свободное
тело, движущееся под действием внешних
сил
![]() .
Оси Cx1y1z1
неизменно связанные с движущимся телом
направлены по главным центральным осям
инерции тела. Оси Cx2y2z2
– движутся поступательно относительно
неподвижной системы Оxyz.
.
Оси Cx1y1z1
неизменно связанные с движущимся телом
направлены по главным центральным осям
инерции тела. Оси Cx2y2z2
– движутся поступательно относительно
неподвижной системы Оxyz.
|
|
|
Рисунок 6.3 |
Дифференциальные уравнения поступательного движения тела вместе с центром масс получаются на основе теоремы о движении центра масс механической системы:
![]()
 ;
;
![]() ;
(6.10)
;
(6.10)
![]() ;
;
Сферическое движение твёрдого тела вокруг центра масс представляет собой движение тела относительно системы осей Cx2y2z2. Это движение определяется динамическими уравнениями Эйлера.
![]()
 ;
;
![]() ;
(6.11)
;
(6.11)
![]() .
.
Уравнения (6.10) и (6.11) составляют шесть дифференциальных уравнений движения свободного твёрдого тела.
В результате интегрирования этих уравнений получим шесть уравнений движения свободного твёрдого тела.
![]()

![]()
![]() (6.12)
(6.12)
![]()
![]()
![]()
4. Понятие о гироскопе. Гироскоп с тремя степенями свободы.
(1-й случай: центр тяжести совпадает с точкой опоры)
Гироскопом с тремя степенями свободы называется гироскоп, движение которого ограничено наличием только одной неподвижной точки.
Неподвижный
гироскоп
вращается равноускоренно под действием
момента
![]() и в течение промежутка времени
угловая скорость вращения гироскопа
вокруг оси Сх
возрастает от 0 до
и в течение промежутка времени
угловая скорость вращения гироскопа
вокруг оси Сх
возрастает от 0 до
![]() 1.
После прекращения действия силы F
гироскоп продолжает вращаться по инерции
вокруг оси Сх
с постоянной угловой скоростью
1.
После прекращения действия силы F
гироскоп продолжает вращаться по инерции
вокруг оси Сх
с постоянной угловой скоростью
![]() 1.
1.
|
|
|
Рисунок 82 |

Вращающийся гироскоп (вокруг оси Cz1). Его кинетический момент направлен вдоль оси симметрии гироскопа Сz1 и равен
![]()
Где
![]() - угловая скорость собственного вращения
гироскопа.
- угловая скорость собственного вращения
гироскопа.
По теореме Резаля
скорость
конца вектора
![]() кинетического
момента гироскопа относительно
неподвижной очки С геометрически равна
главному моменту внешних сил, приложенных
к гироскопу относительно той же точки
кинетического
момента гироскопа относительно
неподвижной очки С геометрически равна
главному моменту внешних сил, приложенных
к гироскопу относительно той же точки
![]() ,
где
,
где
![]()
![]() ,
то есть сила F//Cy
вызывает перемещение оси Cz1
вдоль оси
Сx,
то есть вокруг оси Сy,
а не вокруг оси Сx,
как в случае с неподвижным гироскопом.
,
то есть сила F//Cy
вызывает перемещение оси Cz1
вдоль оси
Сx,
то есть вокруг оси Сy,
а не вокруг оси Сx,
как в случае с неподвижным гироскопом.
Выводы:
-
Смещение оси быстро вращающегося гироскопа происходит не по направлению силы, а по направлению её момента, т.е. перпендикулярно к направлению силы.
-
Быстрое вращение сообщает гироскопу способность противодействовать силам, стремящимся изменить направление его вращения.
Случай регулярной процессии.
(2-й случай: центр тяжести не совпадает с точкой опоры)
![]()
на волчок действуют внешние силы G, реакция опоры в т.О.
![]() (d=OC)
(d=OC)
![]() zOz1,
и направлен на линии узлов ОК.
zOz1,
и направлен на линии узлов ОК.
![]() ось симметрии
волчка Оz1
вращается
вокруг неподвижной оси Оz
с некоторой угловой скоростью
ось симметрии
волчка Оz1
вращается
вокруг неподвижной оси Оz
с некоторой угловой скоростью
![]() (
(![]() –
скорость прецессии,
–
скорость прецессии,
![]() – угол прецессии).
– угол прецессии).
|
|
|
Рисунок 83 |

Определим угловую
скорость прецессии
![]() .
По теореме Резаля
.
По теореме Резаля
![]()
С другой стороны
![]() ,
где
,
где
![]()
таким образом,
![]()
![]()
Вывод: угловая скорость прецессии ω тем меньше, чем больше ω1 – угловая скорость вращения волчка вокруг его оси симметрии.