

Методы измерение температуры с помощью термометра сопротивления (терморезистор)
Физическая основа метода измерения.
Сопротивление R в проводнике зависит от напряжения U и тока I
R = U/ I.
Плотность тока j = I /S зависит от E и σ
j = σE.
Из физики твердого тела известна зависимость электропроводности σ = 1/ρ от длины l свободного пробега и концентрации n электронов проводимости
σ ≈ nl.
Температурная зависимость l(T) имеет вид (рис. 1)
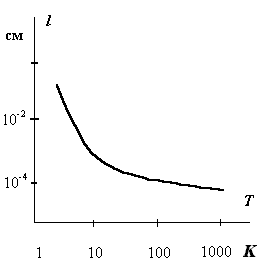
Рис. 1. Зависимость длины l от температуры
Электроны, как волны, рассеиваются на звуковых волнах – фононах, которые связаны с тепловыми смещениями узлов решетки проводника. Чем больше плотность фононов, тем больше эффект рассеивания. Число фононов растет с температурой.
В результате сопротивление терморезистора RT можно представить температурной зависимостью
RT
=
R0
(1
+
![]() (T-T0)
+ ...)
= f(T),
(T-T0)
+ ...)
= f(T),
где
![]() =
0.003> 0 -
термический коэффициент сопротивления
для платины, R0
– сопротивление резистора при Т
= 273.15 К.
=
0.003> 0 -
термический коэффициент сопротивления
для платины, R0
– сопротивление резистора при Т
= 273.15 К.
Пример №5. Метод определения температуры с помощью термометра сопротивления (терморезистор). Электрическая схема СИ дана на рис. 2.

Рис. 2. Электрическая схема для определения температуры с помощью резистора
Rk – электрическое сопротивление образцовой катушки;
RT – термометр сопротивления (резистор);
RM – магазин переменных сопротивлений;
V1 , V2 – вольтметры ( потенциометры).
Схема метода

Рис. 3. Схема метода
Расчетное уравнение метода:
T = f (RT), (1)
где
R![]() =
=![]() .
.
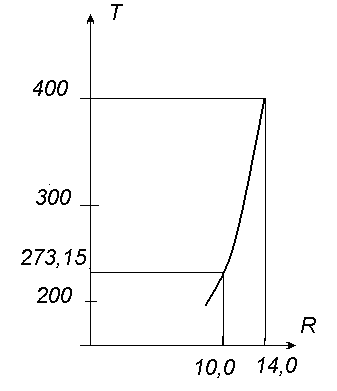
Рис. 4. Градуировочная кривая терморезистора
Функция преобразования терморезистора
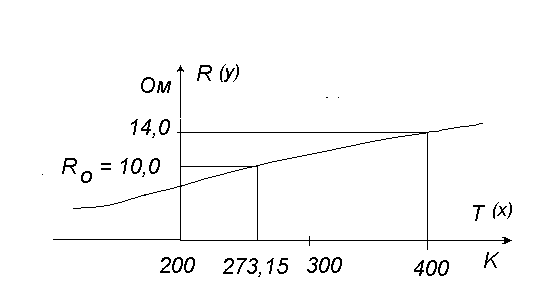
Рис. 5. Зависимость R(T) терморезистора.
Функция преобразования y = f(x) задана аналитическим уравнением R(T) (Например, в Лабораторной работе № 2).
Рассмотренное СИ реализует косвенный метод измерения, так как измеряют первичные значения UT и Uk, а затем получают вычислением а) RT и в) Т = f2 (RT).
Чувствительность задается формулой
S
=
![]() ; S
= Ro
; S
= Ro
![]() +...
[
S
]=[
+...
[
S
]=[![]() ]. (2)
]. (2)
Относительная чувствительность
s=![]() . (3)
. (3)
Отметим, что
T→ 0 α = dR/dT 0.
Расчетное уравнение Т = f2 (RT) получают, например, путем численного решения в заданных точках (RТi) уравнения
f (T) = RТ, (4)
где - f (T) функция преобразования, заданная в аналитическом виде.
Электрическая схема
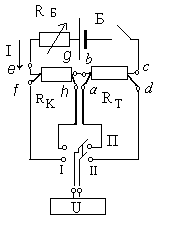
Рис. 6. Потенциометрическая схема измерения сопротивления RT.
RT – термометр сопротивления, RК – катушка сопротивления, П– переключатель, U – потенциометр, b,c – токовые контакты, a,d – потенциометрические контакты.
Напряжение на участках цепи определяются следующими уравнениями:
а) положение переключателя П– I
UК = I RК; (5)
б) положение П – II
UT = I RT. (6)
Значение RT определяют по отношению
RT = (RК UT)/ UК.
Потенциометрический метод предусматривает следующие действия:
-
αr1 – создают тепловой контакт терморезистора и рабочего вещества,
-
αr2 – поддерживают ток постоянным в контуре I,
-
αm1 – измеряют β1 = UK,
-
αm2 – измеряют β2 = UT.
Обработка первичных данных (β1, β2) включает:
а) вычисление RT = f(β1, β2) = (RК UT)/ UК при известном значении RК и б) определение температуры Т по градуировочной зависимости T = f(RT).
Резистор RT представляет собой СИ в виде «измерительного преобразователя».
Тип СИ
СИ в компоновке, показанной на Рис. 2, представляет собой измерительную систему, так как в нее включены несколько самостоятельных приборов – СИ. В лаборатории (Лабораторная работа № 2) студенты используют платиновый термометр сопротивления.
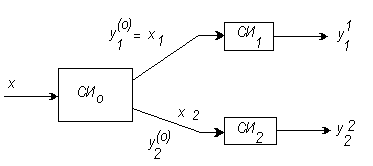
Рис. 7. Схема измерительная системы.
Измерительная система состоит из двух СИ: СИ1 и СИ2. Численное значение х определяется по расчетному уравнению
x = f( y11, y22) = (RК UT)/ UК,
где y11, y22 – первичные данные.
Конструкция
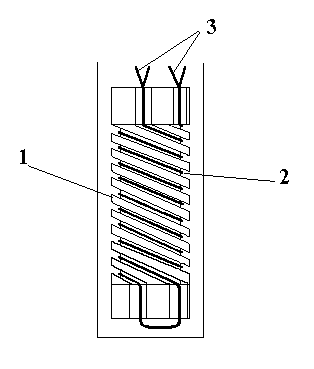
Рис. 7. Конструктивная схема платинового термометра сопротивления
На Рис. 7 показана конструкция платинового термометра сопротивления Стрелкова П.Г. На кварцевом каркасе, имеющем форму геликоида 1, навита спираль 2 из платиновой проволоки. Диаметр платиновой проволоки 0,05 мм. Каркас со спиралью образуют чувствительный элемент термометра сопротивления диаметром 3 4 мм и длиной 50 мм. В нижней части каркаса размещена петля спирали, в верхней - приваренные к спирали две пары выводящих проводников 3 из платиновой проволоки диаметром 0,3 мм. Чувствительный элемент помещен в герметичный чехол, который изготовлен из плавленого кварца и заполнен газообразным гелием.
Расчетное уравнение т (rt)
Температура определяется расчетным уравнением в форме
T
= t
‘+0,015![]()
![]() )
)![]()
![]() , (7)
, (7)
где t’- «платиновая» температура, оС, значения (100; 419.58; 630.74) температуры (оС) а) кипения воды, б) затвердевания цинка и в) затвердевания сурьмы при давлении равном одной физической атмосфере.
Величина t’ задается уравнением
t’
=
![]() (w
- 1) +
(w
- 1) +
![]() ,
(8)
,
(8)
где
w
= R(T)/R0,
R(T)
– сопротивление
термометра при измеряемой температуре;
R0
= 10.0923 Ом
сопротивление термометра при![]() температуре
0 ОС;
=3.9141∙10-3,
=1.49187
эмпирические коэффициенты уравнения,
характеризующие данный термометр
сопротивления (Лабораторная работа
№2).
температуре
0 ОС;
=3.9141∙10-3,
=1.49187
эмпирические коэффициенты уравнения,
характеризующие данный термометр
сопротивления (Лабораторная работа
№2).
Функция преобразования
Для области температур (0…630) оС функция преобразования задается уравнением
RT = R0 (1 + AT + BT 2 ), (9)
где – A =f1(α, δ), B =f2 (α, δ).
Допустимая погрешность Δ = 0.05…0.20 оС.
Для области температур (- 200…0) оС функция преобразования задается уравнением
RT = R0 (1 + AT + BT 2 + C(T - 100)T2), (10)
где A =f1(α, δ), B =f2 (α, δ), C =f3 (α, γ) - константы, α, δ, γ – эмпирические параметры (индивидуальные константы).
Допустимая погрешность Δ = 0.05 оС.
Для области температур (13…273.150) К
RT = R0 (1 +Σai ti), i = 1…8, t = T/100. (11)
Допустимая погрешность Δ = 0.005…0.01 К.
Мостовой метод
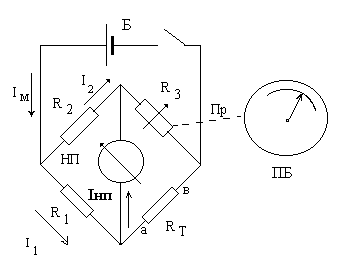
Рис. 8. Схема уравновешенного моста.
RT – терморезистор, НП – нуль-прибор, ПБ – показывающий блок, Пр – преобразователь, a и b – клеммы подключения терморезистора.
Напряжения на участках цепи при условии IНП = 0, которое достигается путем изменения R3 = var, имеют вид
I2 R2 = I1 R1, (12)
I2 R3 = I1 RТ. (13)
Из уравнений (9,10) можно получить уравнение для сопротивлений уравновешенного моста
RT/ R1 = R3 / R2. (14)
Из уравнения (14) можно получить уравнение для RT
RT = (R3 R1)/ R2. (15)
Значения R1 и R2 являются известными.
Метод предусматривает следующие действия:
-
αr1 – создают тепловой контакт терморезистора и рабочего вещества, поддерживают постоянным ток через мост,
-
αr2 – варьируют R3 = var и снижают ток через НП до IНП = 0,
-
αr3 – контролируют ток через НП (IНП = 0),
-
αm1 – измеряют β1 = R3.
Обработка первичных данных (β1) включает:
а) вычисление RT = f(β1, β2) = RT = (R3 R1)/ R2 при известных значениях R1 и R2 и б) определение температуры Т по градуировочной зависимости T = f(RT).
Измерительная система состоит из нескольких СИ – СИ1, СИ2 и т.д. Численное значение х определяется по расчетному уравнению
x = f2( y12, y22),
где y12, y22 – первичные данные.
Пример: термометр сопротивления (лабораторная работа № 2 ).
Мост, содержащий трехпроводную схему
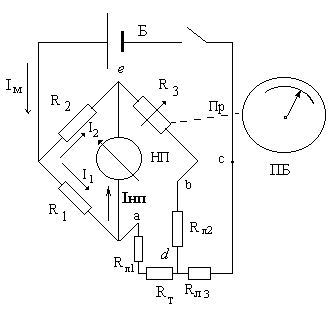
Рис. 9. Мост, содержащий трехпроводную схему подключения RT.
НП – нуль-прибор, ПБ – показывающий блок, Пр – преобразователь, a, b и с – клеммы подключения терморезистора, RЛ1,R Л2 и R Л3. – сопротивления подводящих проводов.
Напряжения на участках цепи, включая два плеча моста (ad, de), при условии IНП = 0, которое достигается путем изменения R3 = var, имеют вид
I2 R2 = I1 R1, (16)
I2 (R3 + RЛ2) = I1 (RT + RЛ1). (17)
Из уравнений (13,14) можно получить уравнение для сопротивлений уравновешенного моста
(RT + RЛ1)/ R1= (R3 + RЛ2) / R2, (18)
Расчетное уравнение для RT получают из (15)
RT = (R3 + RЛ2) R1/ R2 - RЛ1. (19)
При условии R1/ R2 = 1 и RЛ1 = R Л2 выполняется равенство
RT = R3.
Отметим, что при условии R3 = const
RT = f(R1,R2). (20)
Эта зависимость RT = f(R1,R2) используется в схеме автоматического моста.
Автоматический мост
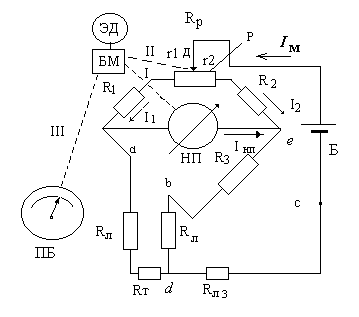
Рис. 10. Схема автоматического моста.
НП – нуль-прибор, ПБ – показывающий блок, Пр – преобразователь, Р – реохорд, Д – движок реохорда, БМ – балансирный механизм, ЭД – электродвигатель, a, b и с – клеммы подключения терморезистора, RЛ1,RЛ2 и RЛ3. – сопротивления подводящих проводов, I,II,III – функциональные связи БМ с блоками.
Во время перемещения движка реохорда изменяются r1 = var и r2 = var, при этом выполняется соотношение (r1 + r2 = RР =const). При достижении IНП = 0 выполняется (см. соотношение (8) для уравновешенного моста) уравнение для сопротивлений моста, включая два плеча моста (ad, de),
(R2 + r2 )/( R3 + RЛ2) = (R1 + r1) /( RT + RЛ1). (21)
Вводим обозначения RЛ1 = R Л2 = RЛ, в итоге расчетное уравнение для RT имеет вид
RT = (R1 + r1)(R3 + RЛ) /(R2 + r2 ) - RЛ = f (r1, r2) = f (r1), (22)
где использована связь r2 = RР - r1 .
Действия, производимые балансирным механизмом, сводятся к тому, что БМ:
-
определяет величину и знак IНП,
-
подключает реохорд Р к электродвигателю ЭД, в результате работы которого движок, Д, реохорда перемещается в соответствии с величиной IНП,
-
подключает ПБ к электродвигателю, в результате работы которого перемещается стрелка ПБ в положение R = RT .
Во время работы моста взаимодействие ряда блоков (реохорд Р, движок Д, балансирный механизм БМ, электродвигатель ЭД и показывающий блок ПБ) преобразуют r1 в RT в соответствии с расчетным уравнением (16).