

journal-7 / journal-7
.pdfнаучно-методический журнал
ИЮлЬ 2011 № 7 (7)
#7
потеря устойчивости
анАПА 2011. ФОТООТЧЕТ
НА ЗАМЕТКУ
Зеленые Призраки.
СЛОВАРЬ НАУЧНЫХ ТЕРМИНОВ гРУППА зАХВАТА увд кк
Работа против
НОЖА
Научно-методический журнал «Система Кадочникова: теория, методика, практика»
#7 • 2011
Главный редактор
Алексей Алексеевич Кадочников
Руководитель проекта
Аркадий Алексеевич Кадочников
Учредители
А.А. Кадочников, Ар.А Кадочников
Издатель
ООО «Неоглори»
Рекламный отдел
тел: +7(612)516690
E-mail: gleb@neoglory.ru
Адрес и телефон редакции:
350015, г. Краснодар, ул. Красная 160, офис 309
Тел: +7(861)2516690
E-mail: info@neoglory.ru
Подписка на журнал www.rukopashka1.ru
Присланные рукописи и другие материалы не рецензируются и не высылаются обратно. Редакция оставляет за собой право не вступать в переписку с читателями. Мнения авторов не выражают позицию редакции. Перепечатка и любое воспроизведение материалов нашего журнала на любом языке возможны лишь с письменного
разрешения издателя
Содержание
Колонка главного редактора
обращение главного редактора к читателям журнала
новости системы
АНапа 2011. Главный семинар года. фотоотчет
боевая механика
Потеря устойчивости. Механика рукопашного боя
ТЕМА НОМЕРА
«Система личной техники безопасности и прикладного рукопашного боя — Система А. А. Кадочникова»
вооружен и очень опасен
Работа против ножа
ПРАКТИКА СИСТЕМЫ
Скольжение вперед, ПЕРЕПОЛЗАНИЕ НА ЖИВОТЕ
АРХИВНЫЕ МАТЕриалы
Зеленые призраки. группа захвата увд кк
словарь научных терминов
на заметку
3
4
7
14
23
25
27
34
36

КОЛОНКА ГЛАВНОГО РЕДАКТОРА
Я получаю много писем от читателей журнала с вопросами об истории возникновения и развития нашей Системы личной техники безопасности.
С одной стороны вполне закономерно направлять эти вопросы в мой адрес. Но с другой стороны — история нашей Системы личной техники безопасности — это тысячи человек, прошедших спецподготовку под моим руководством на протяжении послед-
них 50 лет.
Ведь Система живет и развивается благодаря тем людям, для которых она стала неотъемлемой частью их жизни. Поэтому я принял решение предоставить возможность именно им в первую очередь поделиться своими воспоминаниями и опытом.
Начиная с этого номера мы будем публи-
ковать фрагменты книги моего друга, полковника в отставке С.А. Власова «Зеленые призраки. Группа захвата УВД КК.». Эта книга не историческая. Она посвящена практике организации и подготовки спецподразделений.
В ней рассматриваются важные вопросы спец. подготовки; задачи и подготовка к ре-
шению задач; физическая и боевая подготовка; психологическая подготовка; информационная подготовка; медицинская подготовка; ориентирование в ситуации, обстановке на местности; артистическая подготовка и целый ряд других вопросов.
Но так как автор многие вопросы рассматривает с позиций своего опыта, приобретенного им в первой группе захвата УВД КК
МВД ССР, подготовкой которой я занимался в те годы, то его воспоминания — это ценный вклад в историю развития Систе мы личной техники безопасности.
А.А. Кадочников, главный редактор
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 3
НОВОСТИ СИСТЕМЫ
АНапа 2011. Главный семинар года. фотоотчет
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 4

НОВОСТИ СИСТЕМЫ
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 5
НОВОСТИ СИСТЕМЫ
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 6
БОЕВАЯ МЕХАНИКА
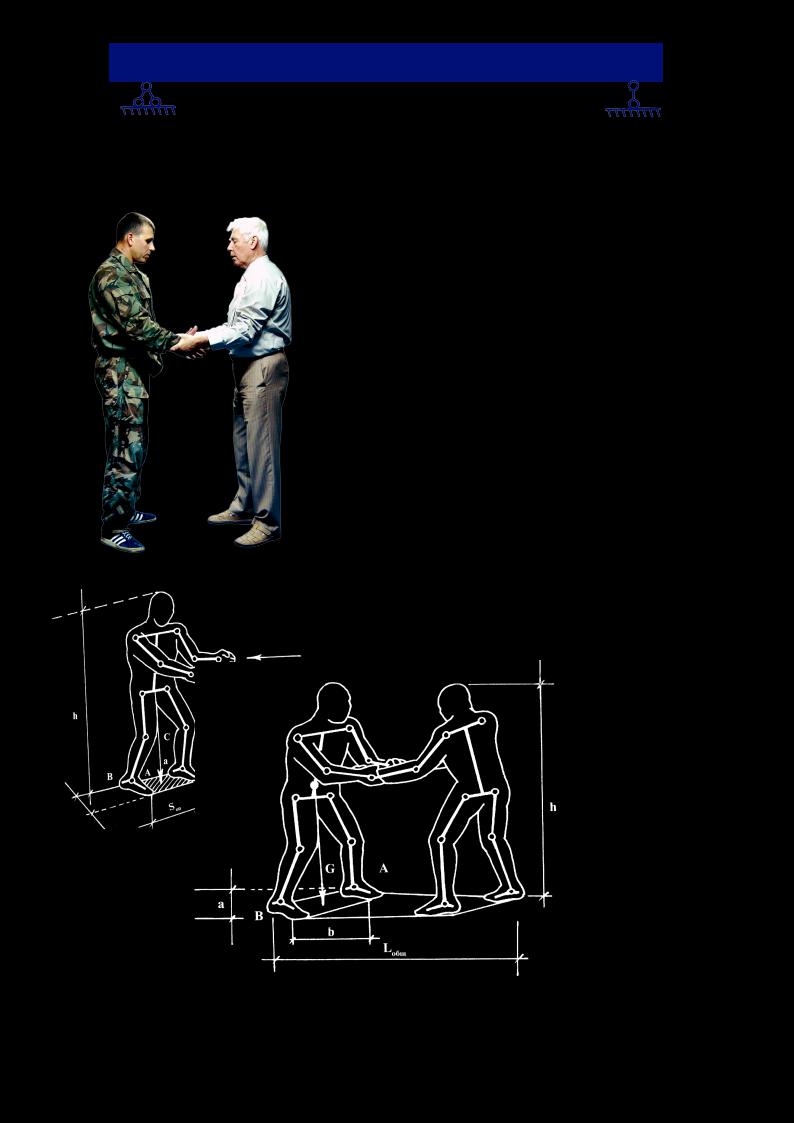
Потеря устойчивости. Механика рукопашного боя
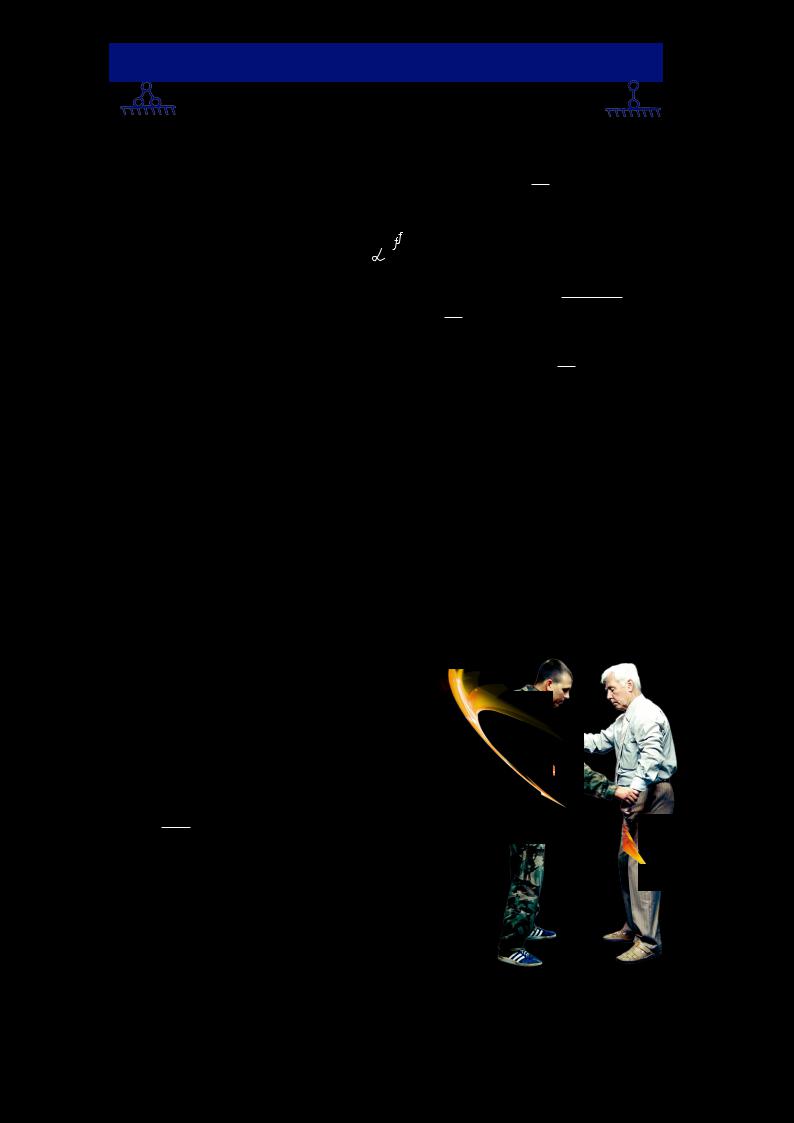
I фаза. Ситуация
F ∙ h ≥ G ∙ е
Рис. 1.2
Рис. 1.1
В данном случае положение противника устойчивое, статичное. Вся система находится в равновесии. Противник в стойке опирается на обе ноги. Площадь опоры максимальная или близка к таковой. Вектор силы тяжести G направлен по центру опорной площадки.
Вывод: система находится в равновесии — положение устойчивое
1.F ∙ h < G ∙ е ― устойчивое равновесие
2.F ∙ h = G ∙ е ― безразличное равновесие
3.F ∙ h > G ∙ е ― неустойчивое равновесие
Не существует особых законов движения для животного мира. Все они подчиняются законам классической механики.
Поэтому рукопашный бой с точки зрения механики представляет собой физическое явление, сущность которого проявляется во взаимноммеханическомсиловомпротиводействии физическихобъектов (противников)другсдругом!
Для успешного п о н и м а н и я и л л ю с т р и р у е м упрощеннымисхемамии уравнениями механики,
гдетеоретическиеэтапы РБ могут выражаться формойрасчетныхсхем раздела сопротивления материаловкаксложного сопротивления (сжатиярастяжения, сдвига, кручения и изгиба) в виде:
1. изгиба со сжатием;
2. изгиба с кручением;
3. косого изгиба;
4. изгиба с растяжением.
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 7

БОЕВАЯ МЕХАНИКА
Схема 1.1
ЦМ |
G
Рис. 1.3
Рис. 1
Схема 1
Система конструкции на рисунке 1 согласно
F ∙ h < G ∙ е,
где G ∙ е > 0
не динамична ― является устойчивой
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 8
БОЕВАЯ МЕХАНИКА
h = 1 F = 0 |
M опрокидывания = F ∙ h |
M устойчивости =G ∙ |
2е |
|
|
|
|||||
|
M опрокидывания = F ∙ h — G ∙ е |
2 |
|
|
|
||||||
|
F ∙ h ≤ G ∙ е ∙ |
― |
трение |
|
|
|
|
|
|||
|
|
|
― угол наклона |
|
|
|
|
|
|||
|
Из системы уравнения: G |
K устойчивости = |
|
M устойчивости |
|||||||
|
|
|
|
||||||||
|
M опрокидывания |
||||||||||
|
W X = 0 |
|
RA = RB |
=2 |
K устойчивости = 0.5 ÷ 1.5 |
||||||
|
W Y = 0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
W{M = 0 |
M опрокидывания = 0 |
F ∙ h < G ∙ |
2е |
|
||||||
|
2 |
||||||||||
|
имеем: |
|
|
|
|
|
|
|
|
|
|
|
X = 0 |
|
|
|
|
|
|
|
|
|
|
|
WW Y = — G + R + R = 0 |
|
|
|
|
|
|||||
|
W{M = G ∙ е — RAA ∙ 2еB |
= 0 |
|
|
|
|
|
||||
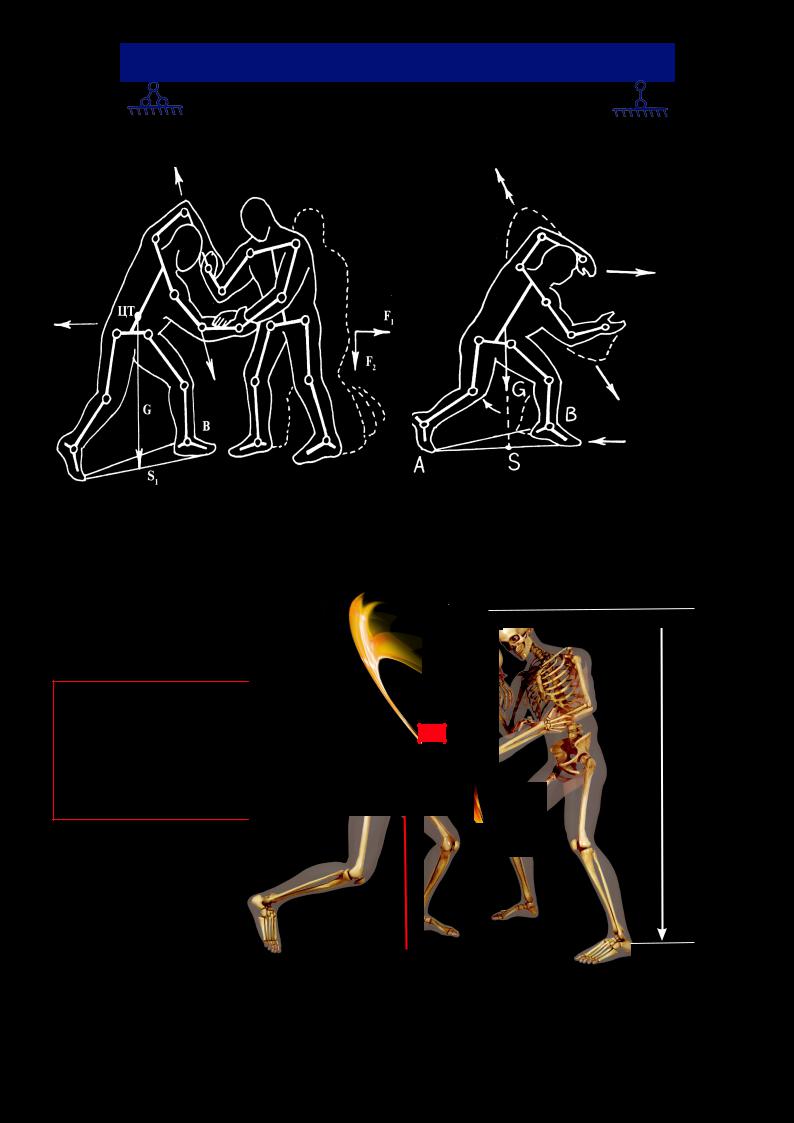
II фаза. Решение
(а)
F = 0
тогда: Схема 2; 3; 4
W W W
{Y = — G + RB ∙ е = 0
X = 0
MB опр = G ∙ е
MB опр = G ∙ е > 0 |
|
MB опр = MB раст = MB изгиб = G ∙ е |
|
M удер |
|
K уст = M опр |
|
M удер = min |
|
M опр = F ∙ h — G ∙ е |
M опр = — G ∙ е |
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 9
БОЕВАЯ МЕХАНИКА
Рис. 2.1
Система конструкции схема 2 не является уравновешенной, так как при изъятии опоры точки А ― появился опрокидывающий
момент MB относительно точки B
Положение системы стало неустойчивое ― система схема 2 ― динамична (подвижна)
Рис. 2.2
высота биомеханической системы
h
ЦМ |
G
Рис. 2.3
СИСТЕМА КАДОЧНИКОВА #7 •ИЮЛЬ 2011 10