

5.2. Расчет настроек Дискретного пи-регулятора методом подбора периода квантования
Для нахождения оптимальных настроек дискретного ПИ-регулятора используем программу Linreg. Для это подставляем настойки непрерывного регулятора, полученные черезLinreg, в настройки дискретного регулятора. При этом частотный показатель колебательности изменяется, чтобы это исправить подбираем период квантования.
Продолжаем менять Тквдо тех пор, пока период колебательности не установится равным М=2,08 (±10%).
Получение АЧХ дискретного регулятора при Ткв= 4

Рисунок 5 – АЧХ дискретного ПИ-регулятора при Ткв= 4
Получение АЧХ дискретного регулятора при Ткв= 0.5
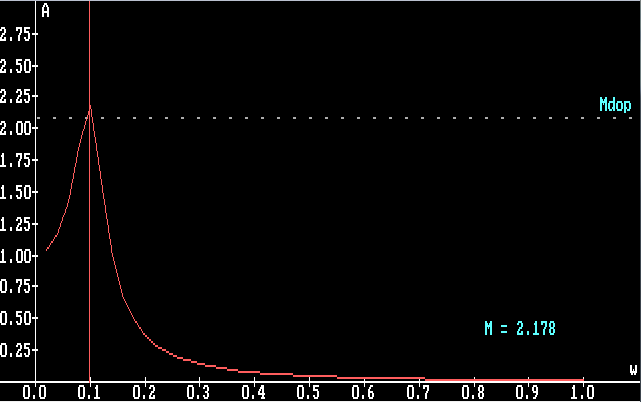
Рисунок 6 – АЧХ дискретного ПИ-регулятора при Ткв= 0.5
Полученные значения настроек ПИ-регулятора в LinReg:
Кп=7,617
Ти=17,902
Ткв=0,5
Для определения оптимальных настроек
ПИ-регулятора построим графики
зависимостей

 см. Рис.7и Рис.8.
см. Рис.7и Рис.8.

Рисунок 7.Зависимости Кп/Ти от Кп

Рисунок8.Зависимости Кп от Ти
По рис.7, рис.8 находим оптимальные настройки непрерывного и цифрового ПИ – регуляторов. Сведем данные в таблицу 9.
Таблица 9. Определение оптимальных параметров объекта
|
Регулятор |
Параметр |
Расчетные данные |
Linreg |
|
Непрерывный |
|
8,4 |
7,617 |
|
|
18 |
17,902 | |
|
|
0,467 |
0,425 | |
|
Цифровой |
|
7,617 |
5,873 |
|
|
17,902 |
18,359 | |
|
|
0,425 |
0,320 |






Расчетные данные имеют небольшое расхождения с настройками ПИ-регулятора в программе Linreg.
6. Модель системы управления в среде matlab
Параметры получены в LinReg
Синтезированная САР с непрерывным и цифровым регуляторами была смоделирована в среде MATLAB (пакет Simulink). Модель системы управления для непрерывного объекта управления (Кп=7,617; Кп/Ти =0,425) и дискретного объекта управления (Кп=5,873; Кр/Ти =0,32; Ткв=4) представлена на рисунке 9:
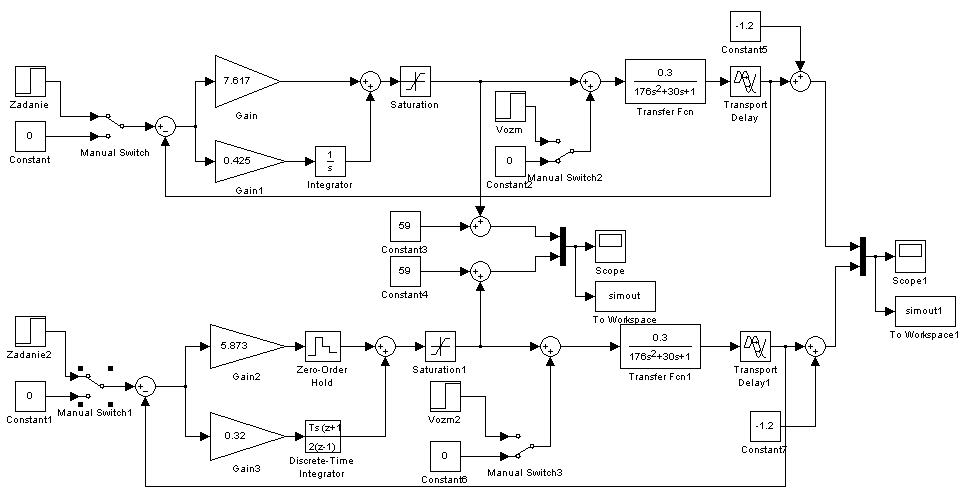
Рисунок 9 Модель системы управления (значения Кп и Ти, полученные в LinReg)
Описание модели Simulink:
Transfer Function – передаточная функция объекта регулирования без запаздывания:

Transport Delay – звено транспортного запаздывания (= 4).
Gain – усилительные звенья в пропорциональной и интегрирующей частях непрерывного и дискретного регуляторов (значения коэффициентов усиления равны соответственно Kпи Kп/Tи).
Integrator – интегратор непрерывный.
Discrete-TimeIntegrator– интегратор дискретного времени (sampletime= 4).
Zero Order Hold (ZOH) – фиксатор нулевого порядка (sample time = 4).
Constant
– константа, значение которой равно
 и
константа
и
константа .
.
Step
(Zadanie) – ступенчатая функция, определяющая
величину задающего воздействия ( ).
).
Step
(Vozm)–ступенчатая функция, определяющая
величину сигнала внутреннего возмущения( ).
).
Saturate – нелинейный элемент-ограничитель (upper limit=59, lower limit=-41).
Sum – сумматор.
Mux – мультиплексор.
Scope – осциллоскоп, который предназначен для отображения зависимости регулируемой величины и сигнала с регулятора от времени.
Синтезированная САР с непрерывным и цифровым регуляторами была смоделирована в среде MATLAB (пакет Simulink). Модель системы управления для непрерывного объекта управления (Кп=8,4; Кп/Ти = 0,467) и дискретного объекта управления (Кп=7,617; Кр/Ти =0,425; Ткв=0,5) (по расчетным данным) представлена на рисунке 10:

Рисунок 10 Модель системы управления (Расчетные данные)
Графики работы системы при отработке задания и внутреннего возмущения представлены в приложении:
Выход системы при отработке задания – Рисунок 11
Выход с ПИ – регулятора при отработке задания – Рисунок 12
Выход системы при отработке внутреннего возмущения – Рисунок 13
Выход с ПИ – регулятора при отработке внутреннего возмущения – Рисунок 14
Параметры, характеризующие качество работы моделированной САР с непрерывным и цифровым регулятором при отработке задания и внутреннего возмущения, приведены в
Таблице 10.
Графики работы системы при отработке задания и внутреннего возмущения представлены в приложении:
Выход системы при отработке задания – Рисунок 15
Выход с ПИ – регулятора при отработке задания – Рисунок 16
Выход системы при отработке внутреннего возмущения – Рисунок 17
Выход с ПИ – регулятора при отработке внутреннего возмущения – Рисунок 18
Параметры, характеризующие качество работы моделированной САР с непрерывным и цифровым регулятором при отработке задания и внутреннего возмущения, приведены в
таблице 11.
Таблица 10.(поLinreg)
|
Параметр |
При отработке задания |
При отработке внутреннего возмущения | |||
|
Непрерывный регулятор |
Цифровой регулятор |
Непрерывный регулятор |
Цифровой регулятор | ||
|
Максимальный выброс регулируемой величины |
|
|
|
| |
|
Степень затухания |
|
|
|
| |
|
Время регулирования |
|
|
|
| |
Таблица 11.(Расчетные данные)
|
Параметр |
При отработке задания |
При отработке внутреннего возмущения | |||
|
Непрерывный регулятор |
Цифровой регулятор |
Непрерывный регулятор |
Цифровой регулятор | ||
|
Максимальный выброс регулируемой величины |
|
|
|
| |
|
Степень затухания |
|
|
|
| |
|
Время регулирования |
|
|
|
| |
Степень затухания:
 ,
где А1и А2– первая и вторая
амплитуды на графике.
,
где А1и А2– первая и вторая
амплитуды на графике.
Максимальный выброс регулируемой величины:

Вывод
В данной курсовой работе были решена задача параметрического синтеза системы стабилизации разряжения в топке котельного агрегата.
Для этого:
Определен период квантования Ткв=4;
Получена Z– передаточная функция ОУ;
Получено разностное уравнение ОУ и построены временные характеристики в аналоговой и дискретной форме;
Построены КЧХ для непрерывного и дискретного ОУ;
Рассчитаны оптимальные параметры настройки непрерывного и цифрового ПИ-регулятора. Модель системы управления для непрерывного объекта управления (Кп=8,4; Ти=18; Кп/Ти = 0,467- расчетные и Кп=7,617; Ти=17,902; Кп/Ти = 0,425 – поLinReg) и для дискретного объекта(Кп=5,873; Ти=18,359; Кп/Ти =0,32; Tкв=4– поLinReg и Кп=7,617; Ти=17,902; Кп/Ти = 0,425; Ткв=0,5 – метод подбора(linreg));
6. По этим параметрам и заданным условиям в среде MATLAB была смоделирована система управления.
В ходе выполнения курсовой работы были приобретены навыки работы в средах LinregиMATLAB+Simulink.