

1.2.2. Графическое изображение множительной структуры
Основан на условном графическом изображении валов и передач. Проведем две вертикальных линии I и II (рис. 10, а). Отложим от линии 00 отрезки, равные lg n1, lg n2, lg n3 ... Через точки 1, 2, 3, ... проведем горизонтальные линии. Вертикали I и II условно изображают валы, а точки 1, 2, 3, ... – их угловые скорости. Число точек на вертикальной линии указывает на количество угловых скоростей данного вала. Отрезки 1 – 2, 2 – 3, 3 – 4, … равны lg φ.
|
|
|
|
а) |
б) |

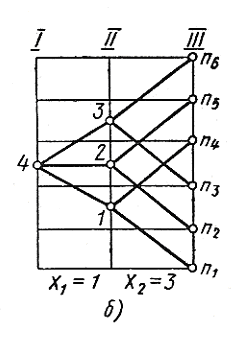
Рис. 10. Графическое изображение множительной структуры
Передачи условно изображают прямыми линиями – лучами (например, 6 – 5,6 – 3,6 – 1). Концы лучей соединяют с точками, соответствующими частотам вращения ведущего и ведомого валов. Луч6– I, например, изображает зубчатую передачу. Колесо сz1вращается с валом I со скоростьюn5, а колесо сz2вращается с валом II cо скоростьюn1.
Лучи с наклоном вверх (считая слева направо) изображают ускорительную передачу, а направленные вниз – замедляющую (редуцирующую) передачу. Передаточное отношение передачи i = φ±s, где s – число интервалов (lg φ), на которое поднимается или опускается луч, изображающий передачу. Для ускорительной передачи s имеет положительное значение, для замедлительной – отрицательное. Пусть лучи 6 – 1, 6 – 3 и 6 – 5 (рис. 10, а) изображают для примера группу передач с трехвенцовым блоком (например, z1 – z2, z3 – z4, z5 – z6, рис. 9, а).
Тогда передаточное отношение передач согласно графику будет
![]() .
.
Для каждой группы передач отводится пространство между двумя смежными вертикальными линиями I и II, называемое полем графика. В его пределах параллельные лучи (см. рис. 10, б) изображают одну и ту же передачу.
Характеристика
группы х
= sx,
где sx
– количество интервалов между соседними
линиями, изображающими передачи данной
группы. Например (рис. 10, а),
для нашего случая между лучами 6
– 1,
6
– 3
и 6
– 5
заключено по два интервала, следовательно,
х
= 2. В самом деле, при работе передачи
![]() скорость вала I равна lgn1,
а переключая передачу на
скорость вала I равна lgn1,
а переключая передачу на
![]() ,
получим lgn3
=
lg n1
+ 2lg φ = lg n1
φ2,
т.е. увеличение скорости в φx
= φ2
раз.
,
получим lgn3
=
lg n1
+ 2lg φ = lg n1
φ2,
т.е. увеличение скорости в φx
= φ2
раз.
Линия 00 и откладывание логарифмов частот вращения произведены для уяснения принципа. Обычно при построении графиков линию 00 не проводят, а точки 1, 2, 3, ... обозначают частоту вращения. Минимальное число вертикальных линий на графиках (по числу валов) равно m + 1, а горизонтальных (ступеней скорости) – z и больше. Передаточные отношения могут быть заданы также отношением диаметров шкивов ременных передач, дисков фрикционных передач и т.п.
Графический метод кинематического расчета состоит из двух частей: построения структурной сетки, характеризующей ряд конкретных приводов в общей форме, и по ней графика частот вращения, уточняющего расчет.
Построим
структурную сетку для множительной
структуры z
= 6 = 3123
(см. рис. 9, а).
Проведем три вертикальных линии,
соответствующие валам I – III (рис. 10,
б)
и шесть горизонтальных линий, по
количеству скоростей вала III. Наносим
точки n1
–
n6,
изображающие ряд частот вращения
последнего. Вал I имеет одну скорость,
следовательно, на линии I должна быть
одна точка (4).
Располагаем ее симметрично, как указано
на рисунке. Первая группа состоит из
трех передач (z1
–
z2,
z3
–
z4,
z5
–
z6),
следовательно, из точки 4
необходимо провести три луча. Так как
характеристика первой группы передач
x1
= 1, расстояние между соседними точками
на линии II должно быть равно одному
интервалу. Наносим симметрично точки
1,
2,
3
и соединяем их с точкой 1.
Лучи 4
– 1,
4 –
2,
4
– 3
изображают передачи
![]() .
.
Проводим
далее лучи, соответствующие двум
передачам второй группы (z7
–
z8,
z9
–
z10).
Так как характеристика х2
= 3, точку 1
соединяем с двумя равноудаленными от
нее точками n1
и n4,
стоящими одна от другой на расстоянии
трех интервалов. Мы получили два луча
1
– n1
и 1
– n4.
Поступаем аналогично с точками 2
и 3,
соединяя их с точками n2,
n5
и n3,
n6.
Один пучок параллельных лучей изображает
передачу ![]() ,
другой –
,
другой – ![]() .
.
Характеризуя привод, структурные сетки являются общими для многих конкретных случаев, однако они не дают представления о частотах вращения валов и величине передаточных отношений передач. Поэтому для определения указанных параметров применительно к конкретным условиям привода строят так называемые графики частот вращения (картины скоростей).
В общем случае частота вращения приводного вала I n = nmaxφu, где nmax – верхний предел регулирования; u – любое число.
Для определения передаточных отношений передач необходимо по структурной сетке построить график частот вращения. Условием для задания передаточного отношения является предпочтительность передач 1 : 1.
С
другой стороны, средством уменьшения
радиальных размеров служит равенство
![]() ,
что приводит к симметричному расположению
лучей. Используя для примера указанные
условия в отношении структурной сетки,
изображенной на рис. 10, б,
точку 4
размещаем на уровне n5,
а точку 3
переносим на самый верх (рис. 11). Точки
1
– 2
располагаем, сохраняя расстояние их от
точки 3,
как на структурной сетке. Соединим по
предыдущему точки лучами и, обозначив
передачи, получим график частот вращения.
,
что приводит к симметричному расположению
лучей. Используя для примера указанные
условия в отношении структурной сетки,
изображенной на рис. 10, б,
точку 4
размещаем на уровне n5,
а точку 3
переносим на самый верх (рис. 11). Точки
1
– 2
располагаем, сохраняя расстояние их от
точки 3,
как на структурной сетке. Соединим по
предыдущему точки лучами и, обозначив
передачи, получим график частот вращения.
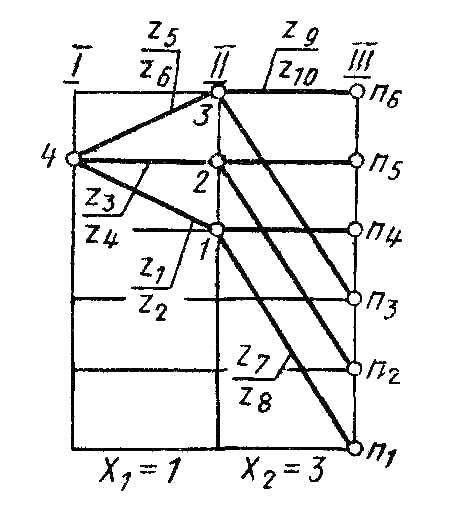
Рис. 11. График частот вращения
Передаточные отношения передач:
– первой группы
![]() ;
;
– второй группы
![]() .
.
Практически принятые условия не всегда выполнимы. Поэтому по одной структурной сетке можно построить несколько вариантов графиков частот вращения.
Из всех возможных конструктивных и кинематических вариантов наивыгоднейшим следует признать тот, который обеспечивает наибольшую простоту, наименьшее количество передач и групп, малые радиальные и осевые размеры. Если z – число ступеней скорости, то наименьшее количество передач sm = pa + pb +…+ pm возможно при условии, если каждое слагаемое из правой части уравнения будет минимальным. Учитывая, что pa, pb, …, pm – целые числа (больше единицы), минимальное значение могут иметь только простые числа – 2 и 3. Вот почему число передач в группах принимают равным 2 или 3, реже 4. При заданном z и минимальном количестве передач в группах увеличивается количество групп m, следовательно, и валов. При уменьшении числа групп возрастает количество передач в группах. Из всех возможных конструктивных и кинематических вариантов структуры с выбранным числом групп наивыгоднейшим следует признать тот, который обеспечивает наименьшие размеры и массу.
Масса зубчатых колес, смонтированных на одном вале, будет наименьшей при минимальной разнице в их размерах. Этим требованиям наилучшим образом отвечает основная группа, так как передаточные отношения передач здесь незначительно отличаются друг от друга. В силу этого целесообразна структура, у которой основная группа содержит наибольшее количество передач. Необходимо, чтобы рa > рb > … > pm. Например, из трех вариантов z = 12 = 3·2·2 = 2·3·2 = 2·2·3 наилучшим является первый – z = 12 = 3·2·2; для z = 18 = 3·3·2 = 3·2·3 = 2·3·3 – вариант z =18 = 3·3·2.
Величина передаваемых ведомым валом крутящих моментов обратно пропорциональна величине передаточных отношений передач. Практически выгодно применять кинематический порядок, при котором минимальное передаточное отношение в группах уменьшается по мере приближения к шпинделю, достигая в последней группе предельного значения. В этом случае первые валы работают при более высоких скоростях, с меньшими нагрузками, имеют меньшие диаметры и модули зубчатых колес. Вместе с тем, промежуточные валы не должны работать при очень больших угловых скоростях, так как при этом возрастают потери холостого хода и износ деталей.
Указанные условия выполнимы, если первая группа будет основной, а характеристики переборных групп передач возрастают по мере приближения к шпинделю, т.е. x1 < x2 < … < xm. Поэтому при построении графиков частот вращения необходимо следить за тем, чтобы минимальные значения передаточных отношений в группах постепенно уменьшались по мере приближения к шпинделю.
Отраслевой стандарт ОСТ2 Н11-1 рекомендует применять при проектировании станков в основном знаменатели ряда φ = 1,26; 1,41; 1,58. ГОСТ 8032 содержит ряды предпочтительных чисел, построенных в виде геометрических прогрессий, которые устанавливают предпочтительные величины и градации параметров в станкостроении, в том числе и ряды частот вращения и подач (табл. 6).
Таблица 6