

ЭМС
.pdf51
распространении в свободном пространстве; Рм0 i - мощность i-го мешающего сигнала при его распространении в свободном пространстве.
6.2 Особенности определения норм ЧТР для аналоговых систем
Мощность помех, пВт, на выходе телефонного канала определяется
отношением: |
|
Ртф = 109/(æQм), пВт, |
(6.12) |
где æ – коэффициент ослабления помех (КОП), зависящий от расстройки несущих частот полезного и мешающего сигналов, параметров их энергетических спектров и характеристик радиоприемника РЭС, подвергающегося воздействию помех; Qм – текущее отношение сигнал/помеха, раз.
Интегральная функция распределения мощности помехи определяется выражением:
Ò ( Ð ) |
Ò= |
V( |
ñ |
Ò) + |
ì |
V( |
ì |
), |
(6.13) |
ï òô äî ï |
|
ñ |
|
|
|
|
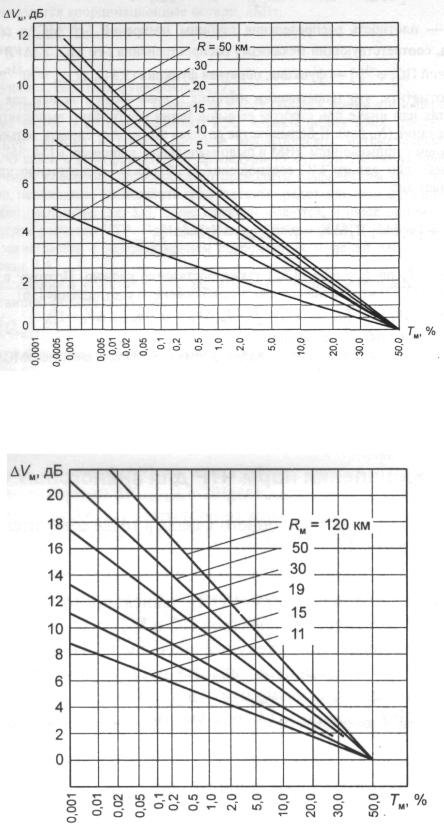
где ΔVс , ΔVм - глубина замираний полезного и мешающего сигналов, соответственно:
|
|
V = |
Z |
=Ð |
; |
V |
Ð |
Z |
. |
(6.14) |
|
|
|
ñ |
|
òô òô äî ï |
|
ì |
òô òô äî ï |
|
|
||
Рабочие формулы для определения |
Тм доп, ΔVс доп |
и ΔVм доп |
будут иметь |
||||||||
вид: |
|
|
|
|
|
|
|
|
|
|
|
|
Òì |
äî ï |
= Òï ( òô äî ï Ð− |
ñ ( |
) ñ äîÒï ) ; |
|
|
(6.15) |
|||
V |
|
= |
Z |
òô |
Ð = |
|
; |
V |
Ð. |
|
(6.16) |
ñ äî ï |
|
|
òô äî ï |
|
ì |
òô äî ï |
òô |
|
|
||
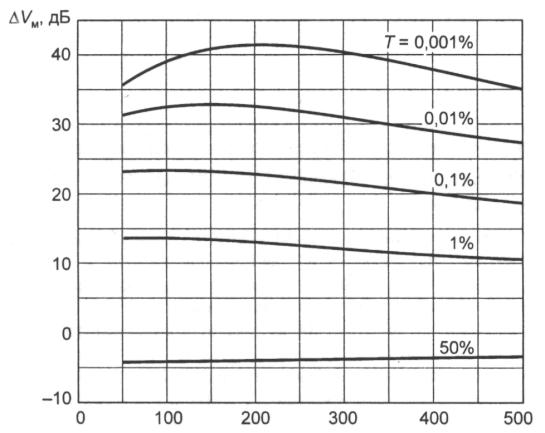
Используя эти значения, по графикам на рисунках 1, 2 и 3 можно найти значение координационного расстояния.
52
Рис. 6.1 Статистическое распределение глубины замираний мешающего сигнала на открытых трассах с прямой видимостью.
Рис. 6.2 Статистическое распределение глубины замираний мешающего сигнала на дифракционных трассах распространения с открытой
местностью.
53
Рис. 6.3 Статистическое распределение глубины замираний мешающего сигнала на сухопутных трассах распространения из-за тропосферного рассеяния.
6.3. Особенности определения норм ЧТР для цифровых систем
Для цифровых систем связи методика анализа ЭМС и определения ЧТР в принципе не отличается от рассмотренной методики для аналоговых систем. Функциональная зависимость Рош учитывает влияние полезного и мешающего сигналов, а также теплового шума (ТШ) приемника (в отличие аналоговых систем, в которых ТШ не оказывает существенного влияния на значение Рп ). Эта зависимость представляется в виде функционала:
Рош = ψ[qш, qм] , |
(6.18) |
где qш - отношение сигнал/шум на входе приемника РЭС, подвергающегося воздействию помех.
Отношение сигнал/шум Qш (в разах) может быть найдено следующим образом:
Qш = Qш мед· V2 |
= Рс0/Рт ш , |
(6.19) |
c |
|
|
54
где Qш мед - медианное значение отношения сигнал/шум, Рс0 - мощность полезного сигнала при его распространении в свободном пространстве; Рт ш - мощность теплового шума, отнесенная ко входу приемника.
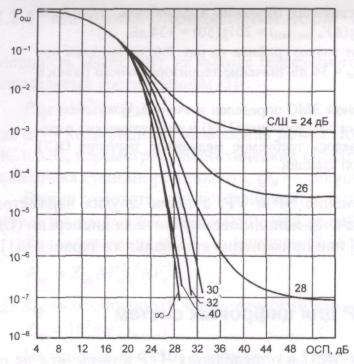
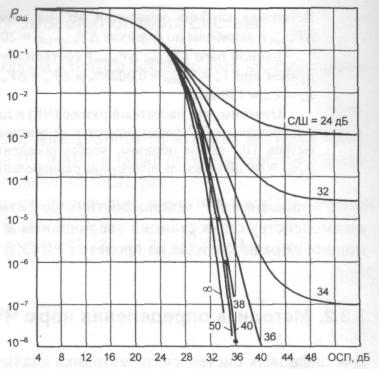
В графическом виде зависимость (6.18) для 64-КАМ представлена на рисунке (6.4), а для 256-КАМ – на рисунке (6.15).
Рис. 6.4. Вероятность ошибок в цифровой системе связи с модуляцией
64-КАМ.
55
Рис. 6.5. Вероятность ошибок в цифровой системе связи
с модуляцией 256-КАМ.
По аналогии с (6.16) и (6.17) можем записать рабочие формулы для определения Тм доп, ΔVс доп и ΔVм доп будут иметь вид:
Òì äî ï = Òï ( î ø äî ï Ð− ñ ( |
) ñ Òäî ï ) ; |
|
|
|
|
(6.20) |
||||||
VÐ, |
=V |
−1 |
VÐ, |
|
V ) |
1 = |
|
−1 |
( |
= |
Ψ |
). |
1( Ψ; |
ì |
ì |
|
|||||||||
ñ äî ï |
|
î ø äî ï |
|
|
|
|
|
î ø äî ï |
ñ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
(6.21) |
Эти формулы позволяют определять ЧТР, используя графики на рис.6.1...6.3.
6.4. Особенности определения норм ЧТР для систем сотовой подвижной связи.
При анализе межсистемной ЭМС РЭС сотовой подвижной связи необходимо рассматривать влияние базовых станций (БС) одной сети на абонентские станции (АС) другой сети, а также и обратное воздействие АС одной сети на БС другой. Например, при наличии на одной территории двух сетей сотовой подвижной связи, созданных на базе различных стандартов, влияние между ними можно описать следующими ситуациями (они схематично показаны на рисунке 6.5):
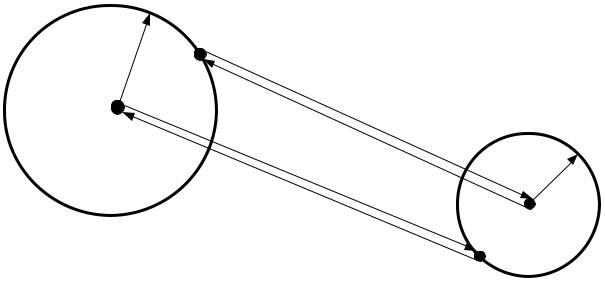
56
АСCDMA → БСAMPS ;
БСCDMA → АСAMPS ;
АСAMPS → БСCDMA ;
БСAMPS → АСCDMA .
ACCDMA |
|
R0 CD |
|
R1 |
|
БCCDMA |
|
R4 |
R0 AM |
|
|
R3 |
|
R2 |
БCAMPS |
ACAMPS
Рис. 6.5
Возможные помеховые ситуации при взаимодействии двух сетей сотовой подвижной связи
(R1, R2, R3, и R4 – территориальные разносы между РЭС совмещаемых сетей).
Из рис. 6.5 следует, что величина max(R1, R4) определяет необходимое расстояние между БСAMPS и АСCDMA , а территориальный разнос max(R2, R3) обеспечивает ЭМС между БСCDMA и АСAMPS . С практической точки зрения целесообразно определить минимально допустимое расстояние между БС рассматриваемых сетей, при котором обеспечивается совместная работа всех РЭС этих сетей с заданным качеством.
Для обеспечения ЭМС РЭС необходимо, чтобы территориальный разнос между БСCDMA и БСAMPS выбирался из следующего условия:
R |
ê |
= max{[R |
0 CDMA |
+ max(R ,R |
)],[R |
0 AMPS |
+ max(R |
2 |
,R |
3 |
)]} , |
(6.22) |
|
|
1 4 |
|
|
|
|
|
где R0 CDMA и R0 AMPS – радиусы зон обслуживания БС в сетях CDMA и AMPS, соответственно.
57
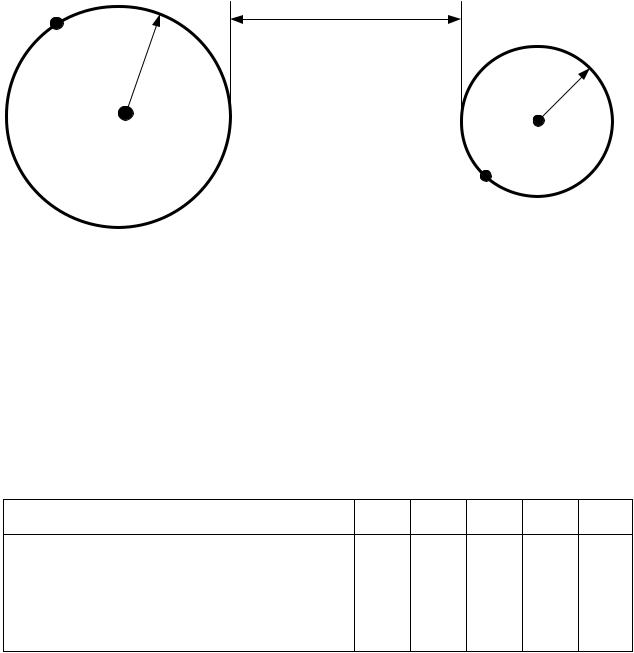
Обеспечение ЭМС РЭС сотовых сетей связи стандартов CDMA и AMPS в совмещенных частотных каналах возможно только в том случае, если установлены ограничения на энергетические параметры этих РЭС, а зоны покрытия сетей разделены некоторой нейтральной областью, определяемой требуемым территориальным разносом между границами сетей. Необходимый территориальный разнос между границами зон обслуживания сетей AMPS и CDMA показан на рис. 6 и может быть определен из выражения:
d = max{[max(R ,R |
4 |
) − R |
0 AMPS |
],[max(R |
2 |
,R |
3 |
) − R |
0 CDMA |
]}. |
(6.23) |
1 |
|
|
|
|
|
|
ACCDMA |
d |
|
|
|
|
|
R0 CD |
R0 AM |
|
Нейтральная область |
|
|
БCCDMA |
БCAMPS |
|
ACAMPS |
|
Рис. 6.6
Необходимый территориальный разнос между границами сот двух сетей.
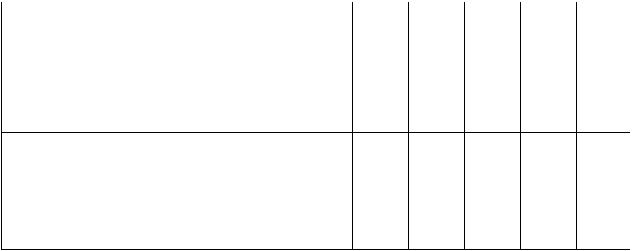
Значения территориального разноса, рассчитанные по описанной методике, приведены в табл. 6.1.
Таблица 6.1.
|
|
R0 CDMA, км |
R0 AMPS, км |
R1, км |
R2, км |
R3, км |
R4, км |
D, км |
d, км |
В направлении |
|
|
|
|
|
|
|
|
|
максимума ДН |
|
|
|
|
|
|
|
|
|
антенны |
БС в |
|
|
|
|
|
|
|
|
гориз. |
пл., |
1,8 |
5,3 |
4,0 |
3,1 |
15,4 |
6,1 |
20,7 |
13,6 |
|
|
||||||||
Gmax=13 дБ
|
|
|
|
|
58 |
|
|
|
|
|
В направлении |
|
|
|
|
|
|
|
|
||
первого |
БЛ |
0,5 |
1,4 |
1,0 |
0,82 |
4,0 |
1,6 |
5,4 |
3,5 |
|
ДНА |
БС |
в |
||||||||
гориз. пл., |
|
|
|
|
|
|
|
|
|
|
УБЛ = -7 дБ |
|
|
|
|
|
|
|
|
|
|
В направлении |
|
|
|
|
|
|
|
|
||
первого |
|
БЛ |
0,12 |
0,37 |
0,27 |
0,21 |
1,0 |
0,42 |
1,37 |
0,88 |
ДНА |
БС |
в |
||||||||
гориз. пл., |
УБЛ |
|
|
|
|
|
|
|
|
|
= -27 дБ |
|
|
|
|
|
|
|
|
|
|
Глава 7. Обеспечение ЭМС с помощью компенсаторов помех
7.1 Общие замечания об использовании аппаратурных средств для уменьшения влияния мешающих радиосигналов на качество приема полезного радиосигнала
Влияние мешающих радиосигналов на качество приема полезного радиосигнала может быть уменьшено различными методами. По принципу достижения улучшения приема их можно условно разделить на три группы: 1/ улучшение приема за счет ослабления МС на входе приемника -- додетекторная обработка входного воздействия; 2/ улучшение приема за счет компенсации помех на выходе канала, вызванных мешающим сигналом, или полного разделения полезного и мешающего радиосигналов.
Примерами методов первой группы являются метод адаптивной коррекции диаграммы направленности приемной антенны в зависимости от изменения расположения источника МС, а также применение адаптивных фильтров, повышающих отношение уровней ПС и МС перед демодуляцией. Ряд методов второй группы, рассмотренных в [1], приведены ниже.
7.2. Обеспечение ЭМС при помощи одноканальных компенсаторов помех
Оптимальный одноканальный компенсатор помех представляет собой устройство, предназначенное для разделения однотипных или разнотипных сигналов, одновременно поступающих на вход приемника. Синтез такого компенсатора может осуществляться на основе теории оптимального приема непрерывных сигналов либо на основе иных – оригинальных - соображений.

59
В общем случае одноканальный компенсатор помех обеспечивает выделение сообщения ai(t) из сложного сигнала W(t), представляющего собой сумму N сигналов, действующих на входе приемника:
|
|
N |
|
|
|
|
|
|
|
|
W(t) = A ∑µiSi (t,aλ i+, |
|
i ) =n(t)λS(t,+a, |
|
) n(t) , |
(7.1) |
|||||
|
|
i=1 |
|
|
|
|
|
|
|
|
где Si (t,ai , |
|
i ) - i –й |
сигнал, поступающий на |
вход приемника и |
||||||
λ |
||||||||||
модулированный сообщением |
ai(t); |
|
i - вектор – столбец параметров сигнала; |
|||||||
λ |
||||||||||
А·μi - амплитуда i –го сигнала; n(t) – белый гауссовский шум.
Для различных видов сигналов Si (t,ai ,λi ) имеет следующий вид:
- для сигнала с амплитудной модуляцией:
1 ) ;
- для сигнала с фазовой модуляцией;
S (t,a |
, |
|
) = sinω( |
+t |
a |
(t)+ |
ϕ |
|
); |
|
|
λ |
1 |
|
|||||||||
i i |
|
|
|
i |
1 |
i |
|
|
|
|
|
- для сигнала с частотной модуляцией: |
|||||||||||
|
|
|
|
|
+1t |
t |
|
|
|
|
|
Si (t,ai ,λi ) = sinω |
∫ ai (t)dt+ ϕ 1 |
, |
|||||||||
|
|
|
|
|
|
−∞ |
|
|
|
|
|
где ωi и |
φi – несущая частота и фаза i – го сигнала. |
||||||||||
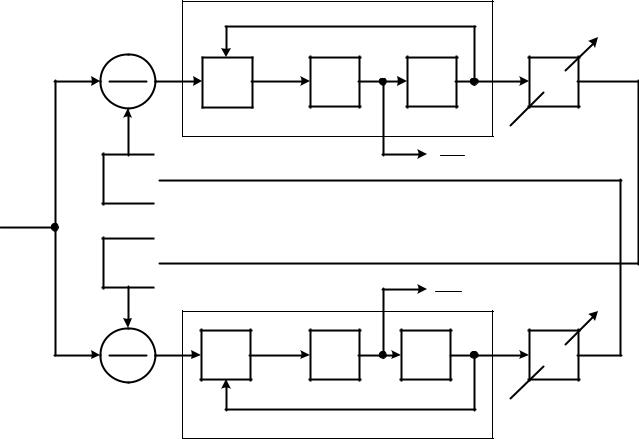
Оптимальный следящий компенсатор помех для разделения двух ЧМ сигналов
Такое устройство позволяет разделить два ЧМ сигнала c существенно перекрывающимися спектрами и, следовательно, в большой степени ослабить взаимные помехи при их приеме. Блок-схема такого компенсатора помех приведена на рисунке 7.1.
90o 
W(t)
90o 
60
СФД1
ФД |
ФНЧ |
ГУН |
дБ |
d a1
dt
|
|
d a2 |
|
|
|
dt |
|
ФД |
ФНЧ |
ГУН |
дБ |
СФД2
Рис.7.1.Оптимальный следящий компенсатор помех для разделения двух ЧМ сигналов
Схема содержит два вычитателя (по одному на входе каждого канала) и два синхронных фазовых детектора (СФД), состоящих из фазового детектора и генератора, управляемого напряжением (ГУН). Аттенюаторы регулируются таким образом, чтобы на их выходе амплитуды ЧМ сигналов были равны амплитудам компенсируемых сигналов. Особенностями работы данного компенсатора помех являются следующие:
-ЧМ сигналы могут быть им полностью разделены без переходных помех между ними, если они имеют одинаковые несущие частоты и амплитуды, а сдвиг фаз между сигналами равен 900;
-если фазовый сдвиг между сигналами случаен и может принимать любые значения, то для их эффективного разделения с малыми переходными помехами необходимо увеличить частотный разнос между сигналами;
-при значительном частотном разносе между сигналами уровень помех на выходе демодулятора не зависит от уровня мешающего сигнала на входе.