

Метрологія / КонЛекМетр / TEMA_18
.DOCТЕМА18: ІНФОРМАЦІЙНО-ВИМІРЮВАЛЬНІ СИСТЕМИ
1.Класифікація ІВС
Інформаційно-вимірювальні системи (ІВС) – сукупність функціонально об’єднаних вимірювальних, обчислювальних та інших засобів, призначених для отримання, перетворювання та обробки інформації з метою подання її користувачу у потрібному вигляді.
Характерна особливість ІВС – невикористання їх для видачи керуючої дії на відміну від автоматизованих систем керування (АСК).
ІВС можуть бути складовою частиною більш складних систем АСК, наприклад, систем зв’язку, телемеханіки. Вимірювальні системи можуть впливати на об’єкт, но тільки з метою отримання найбільш якісної інформації о системах, в яких вони звичайно використовуються у якості постачальників інформації. Дія ІВС полягає у алгоритмі вимірювань і не є наслідком обробки отриманої інформації.
ІВС по функціональному призначенню класифікуються на :
— системи вимірювання;
-
системи технічної діагностики;
-
системи автоматичного контролю;
-
ситеми розпізнавання образів або системи ідентифікації.
По способу обробки інформації ІВС класіфікуються на системи реального часу та системи, що накопичують інформацію. У системах реального часу обробка інформації проводиться до наступного вимірювального циклу. Такі системи використовуються як підсистеми АСК у якості постачальника інформації для наступного вироблення керуючої дії. У інших системах обробка інформації починається після закінчення вимірювань.
По впливу на об’єкт дослідження ІВС розподіляються на:
-
пасивні ІВС;
-
активні ІВС.
У пасивних ІВС дія на об’єкт вимірювання відсутня. У активних ІВС виробляється дія на об’єкт з допомогою джерел тестових сигналів, яка необхідна для отримання найбільш певної інформації за малий проміжок часу та позволяє найбільш повно досліджувати об’єкт.
2.Агрегатний принцип побудови ІВС
Цей принцип є найбільш раціональним принципом побудови ІВС. Така система виготовляється як агрегат із функціонально закінчених блоків, наприклад, частотомір, таймер, вольтметр, АЦП, ЦАП і т.д.
Безліч ІВС, які побудовані за цим принципом, досягається безліччю компонуємих блоків, які у свою чергу , визначаються переліком параметрів, що вимірюються та реєструються.
Найбільш яскравий приклад агрегатної ІВС - система САМАС (“Computer Application for Measurement and Control” або з інших джерел “Computer Automated Measurement and Control”). Вона спочатку була розроблена для ядерних досліджень. Однак, завдяки своїй простоті, потужності та зручності знайшла широке застосування і у інших галузях. Особливо широко система САМАС застосовується для автоматизації наукових досліджень.
При проєктуванні ІВС за агрегатним принципом повинні виконуватись 5 видів сумісності:
а) інформаційна сумісність (узгодженість вхідних та вихідних сигналів різних модулів);
б) енергетична сумісність (відповідність струмів та напруг живлення);
в) конструкційна сумісність (сумісність конструктивних параметрів – розмірів, типів роз’ємів та ін.);
г) метрологічна сумісність (зіставлення точності, швидкодії, діапазонів вимірів та ін.);
д) експлуатаційна сумісність ( узгодженість по надійності, стабільності та стійкості до перешкод).
3.Класифікація інтерфейсів
Під інтерфейсом розуміють сукупність програмних, електричних та механічних засобів, які дозволяють поєднувати модулі у єдину систему.
Важливою характеристикою будь-якого інтерфейсу є різновид протоколу обміну інформацією. Розрізняють синхронний і асинхронний протоколи обміну.
Синхронний протокол використовується в тих випадках, коли всі прилади, що беруть участь в обміні, мають однакову швидкодію. Така ситуація зустрічається досить рідко, хоч при цьому забезпечується висока точність і швидкодія.
Асинхронний протокол обміну перед передачею даних вимагає опиту стану приладів, які будуть брати участь в обміні.
Усю сукупність інтерфейсів можна розподілити на:
а) машинні інтерфейси – призначені для з’єднання центрального процесора ЕОМ з іншими блоками та зовнішніми засобами;
б) системно-модульні інтерфейси – призначені для об’єднування у систему модулів, кожен з яких не є окремо закінченим приладом, а призначений для експлуатації у системі, наприклад, САМАС;
в) системно-приладні інтерфейси – призначені для об’єднування у систему окремих приладів, тобто функціонально закінчених пристроїв.
Інтерфейси, які застосовуються для ІВС, мають назву вимірювальних інтерфейсів.
У залежності від способу з’єднання блоків між собою, розрізняють: каскадні, радіальні та магістральні інтерфейси.
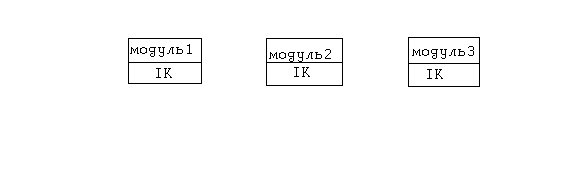
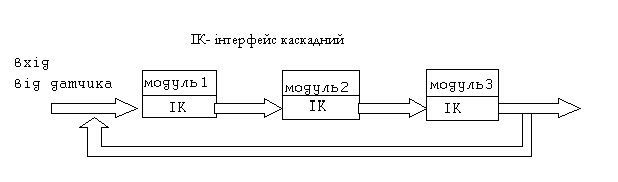
У каскадних інтерфейсах інформація із попереднього модуля може передаватися тількі наступному:











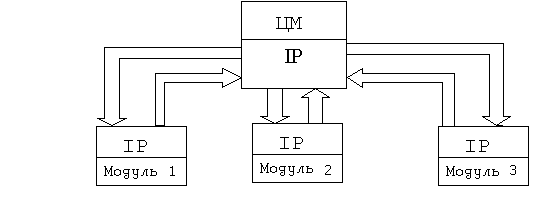 Радіальний
інтерфейс
– при такому об’єднуванні
центральний модуль може зв’язуватись
з кожним модулем по окремому каналу.
Для цього треба мати достатню кількість
каналів зв’язку,
що створює значне ускладнення апаратної
реалізації центрального модуля. Цей
тип інтерфейсу забезпечує високу
швидкодію працювання системи.
Радіальний
інтерфейс
– при такому об’єднуванні
центральний модуль може зв’язуватись
з кожним модулем по окремому каналу.
Для цього треба мати достатню кількість
каналів зв’язку,
що створює значне ускладнення апаратної
реалізації центрального модуля. Цей
тип інтерфейсу забезпечує високу
швидкодію працювання системи.
ІР Модуль
2 ІР Модуль3 3 ІР Модуль
1

ЦМ – центральний модуль;
ІР – інтерфейс радіальний.
Магістральний інтерфейс застосовується у системах, у яких центральний модуль не володіє достатньою кількістю каналів зв’язку для підключення усіх модулів вимірювальної системи. У цьому випадку снижується швидкодія системи, однак значно спрощується апаратна реалізація інтерфейсу. Зв’язок модулів здійснюється через загальну магістраль.
ЦМ ІМ Модуль3 ІМ Модуль1








ІМ


Магістраль




ІМ
Модуль2
Застосовують також комбінації iнтерфейсів: каскадно-радіальний, каскадно-магістральний.
Усі спряження у межах інтерфейса виконуються з допомогою ліній зв’язку, які з’єднують у шину.
Шиною називається група ліній передачі інформації, яка об’єднана однією функціональною ознакою.
4. Цифровий інтерфейс КОП (МЭК)
Це найбільш розповсюджений стандартний приборний інтерфейс. Він має кілька назв:
КОП – канал общего пользования (рос.);
МЭК – международная электротехническая комиссия (рос.);
IEEE – 488 - Institute of Electrical and Electronics Engineers (англ.)
Інтерфейс легко стикується з компьютерами ІВМ РС. Рекомендований в якості міжнародного. Він дозволяє мати у ситемі до 15 приладів різної складності. Орієнтований на спряження пристроїв, які розташовані на відстані до 20 м.




прийом передача прийом- передача прийом-
передача-
керування
























Ш И Н А Д А Н И Х ( 8 Л І Н І Й )




















Ш И Н А С И Н Х Р О Н И З А Ц І Ї ( 5 Л І Н І Й )

















 Ш И Н А
К Е Р У В А Н Н Я ( 3 Л І Н І Ї )
Ш И Н А
К Е Р У В А Н Н Я ( 3 Л І Н І Ї )
Інтерфейс КОП представляє собою шістнадцятирозрядну двонаправлену шину, яка називається магістраллю або каналом загального користування. Відноситься до магістральних інтерфейсів. Він здійснює біт-паралельну, байт-послідовну передачу даних. В інтерфейсі використовується синхронний протокол обміну.
Канал загального користування містить 15 ліній, які об’єднані у три шини: шину даних, шину синхронізації та шину керування.
Пристрої, що підключаються до інтерфейсу, поділяються на групи: “тільки слухають” – група D, “тільки розмовляють” – група С, “слухають та розмовляють” – група В, “слухають-розмовляють-керують” – група А.
У якості пристроїв останньої групи встановлюється контролер, на який покладаються функції коордінації дії інших пристроїв. Частіше усього у якості контролера застосовують персональний компьютер, що має спеціальну плату інтерфейсу КОП.
Такі ІВС побудовані по принципу: “розмовляти” у будь-який момент може один модуль, а “слухати” – решта (будь-яка кількість модулів).
По шині даних передаються результати вимірювань, результати обробки інформації та адреси модулей. Шина складається з 8 ліній.
По шині синхронізації , яка має 3 лінії, передаються сигнали:
-
СД(супроводження даних);
-
ГП (готовості приладу до прийому даних);
-
ДП ( дані прийняті) сигнал, який підтверджує закінчення обміну інформацією.
По шині керування передаються керуючі сигнали, які циркулюють між контролером та іншими приладами, що підключені до інтерфейса. Шина складається з 5 ліній:
-
УП (управління) відведена для команди, яка посилається контролером;
-
ОІ (очистити інтерфейс) ;
-
ЗО (запитання на обслуговування);
-
ДУ (дістанційне управління);
-
КП (кінець передачи).
Інтерфейс розроблений для електронних вимірювальних приладів, що програмуються і не програмуються.