

Занятие 2
1 Влияние пассивных помех на боевые возможности рлс
Основным пространственными показателями боевых возможностей подразделений и частей РТВ являются параметры радиолокационного поля, которые определяются тактико-техническими характеристиками РЛС (РЛК), построением боевых порядков и другими факторами.
При работе в условиях отсутствия помех параметры радиолокационного поля (РЛП), с достаточной для практики точностью, могут быть определены по зонам обнаружения развернутых на боевых позициях с использованием одного из методов, которые были рассмотрены в первой части курса лекции.
Опыт локальных войн и конфликтов, в особенности боевых действий в Югославии и зоне Персидского залива, современные взгляды потенциального противника на подготовку и ведение боевых действий свидетельствуют о том, что в современной войне будут интенсивно и широко использоваться все средства радиоэлектронной и информационной борьбы. Исходя из этого требуется, чтобы войска знали свои боевые возможности в условиях сильного радиоэлектронного противодействия противника и умели в этих условиях эффективно использовать имеющиеся вооружение и военную технику.
Проблема обеспечения высокой помехоустойчивости группировки РТВ не может быть решена без всесторонней оценки ожидаемой помеховой обстановки и индивидуальной помехозащищенности РЛС (РЛК) как от активных, так и пассивных помех.
Методика определения возможностей рлс (рлк) по обнаружению воздушных объектов в условиях пассивных помех
Одним из способов постановки пассивных помех РЛС является периодическое сбрасывание пачек ДО с самолета или другого летательного аппарата. Если пачки сбрасываются достаточно часто, формируемые ими облака сливаются друг с другом, в результате чего образуются довольно широкие и протяженные области пространства, внутри которых хаотически разбросаны дипольные отражатели. Такие области пространства часто называют полосами пассивных помех или дипольных отражателей.
В основу оценки возможностей РЛС (РЛК) по обнаружению воздушных объектов в зонах пассивных помех положен критерий сравнительной оценки эффективности отражающих поверхностей (ЭОП) цели и пассивной помехи, находящихся в одном импульсном объеме. Поскольку в приемном тракте РЛС (РЛК) имеется аппаратура защиты, подавляющая пассивные помехи, то очевидно, что сравнение ЭОП цели (σц) необходимо производить не с реальной ЭОП пассивной помехи (σп), а с так называемой приведенной ЭОП помехи (σп прив), значение которой учитывает ослабление помехи аппаратурой защиты.
Критерий обнаружения имеет вид
σц ≥ σ п прив ,
где σп прив = σп/Кпв, Кпв – коэффициент подпомеховой видимости, который показывает во сколько раз на входе приемника мощность сигнала, отраженного от пассивной помехи (Рп), может превышать мощность полезного сигнала (Рс) (отраженного от цели), когда станция еще обеспечивает обнаружение целей в зонах помех.
При выполнении данного критерия делается вывод о возможности обнаружения воздушных объектов, имеющих ЭОП σц (если конечно объект находится в пределах зоны обнаружения), при невыполнении – о невозможности обнаружения.
Таким образом, для оценки возможности РЛС (РЛК) по обнаружению воздушных объектов в зонах пассивных помех необходимо знать численные значения σц и σп прив.
Значения ЭОП воздушных целей (СВН потенциального противника) берутся из справочников, а значения σп прив рассчитываются.
Для расчета σп прив необходимо иметь следующие данные:
По противнику:
количество автоматов сброса пачек дипольных отражателей на соответствующем постановщике помех (m);
количество пачек дипольных отражателей, выбрасываемых в единицу времени одним автоматом (N);
ЭОП одной пачки дипольных отражателей (σ1п);
скорость полета постановщика помех (Vп);
направление полета постановщика помех, которое определяется углом α между направлением полета ПП и параметром его движения р.
По РЛС (РЛК):
длительность сигнала, обрабатываемого в приемном тракте (τи);
ширину ДНА в горизонтальной плоскости (β0.5р);
коэффициент подпомеховой видимости (Кпв).
Применительно к полосам ДО, поставленным для наземных РЛС обнаружения, наиболее важной является характеристика разлета диполей в направлении, перпендикулярном оси полосы, поскольку при таком разлете изменяется ширина полосы Lпп и уменьшается средняя концентрация диполей в импульсном объеме, а следовательно, и среднее значение суммарной ЭОП ДО, попадающих в импульсный объем σп.
Разлет диполей в направлении оси полосы и в вертикальной плоскости практически не приводит к изменению σп .
При разлете диполей в направлении оси полосы не изменяется средняя концентрация диполей вследствии того, что поток ДО из одного облака в другое компенсируется встречным потоком диполей из второго облака в первое.
При разлете в вертикальной плоскости диполи обычно не выходят из импульсного объема РЛС, так как диаграммы направленности РЛС обнаружения в угломестной плоскости, как правило, широкие.
Рис.4.40 дает качественную картину изменения концентрации ДО во времени в точке раскрыва пачки от координаты х, перпендикулярной направлению движения постановщика.
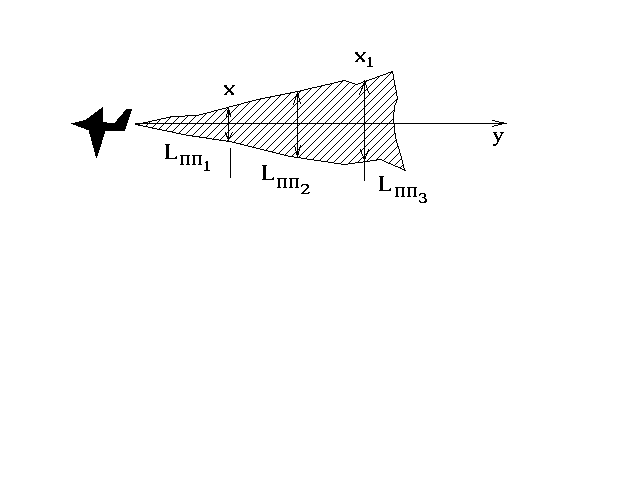
Рис.4.40. Качественная картина изменения концентрации дипольных отражателей
Ширина полосы ДО вначале увеличивается, а затем уменьшается по мере падения части ДО на Землю.
Можно показать, что при движении постановщика ПП в радиальном и тангенциальном направлениях среднее значение эффективной поверхности ДО в импульсном объеме РЛС определяется соответственно выражениями:
![]()
![]()
где τи – длительность импульса на выходе приемника РЛС (после детектора); β0.5р – ширина ДН РЛС в азимутальной плоскости в градусах; n100 – линейная плотность ДО (количество пачек на 100 метров пути); σ1п – среднее значение эффективной поверхности одной пачки ДО; r ПП – дальность до выделенного импульсного объема в облаке ДО; Ф(·) – интеграл вероятности; aе = min(ε0.5р/ΔεПП, 1) – коэффициент , учитывающий разрешающую способность РЛС по углу места, ΔεПП – угловой размер облака в вертикальной плоскости.
Таким образом, для оценки возможности РЛС (РЛК) по обнаружению воздушных объектов в зонах пассивных помех необходимо знать численные значения σ ц и σп прив. Критерий обнаружения имеет вид
σц ≥ σп прив.