2.3. Розрахунок регулятора швидкості
Контур регулювання швидкості з регулятором швидкості призначений для скомпенсування великої електромеханічної постійної часу та забесбечити сталість кутової швидкості при зміні статичного моменту на валу. Сам регулятор представлений як П-регулятор швидкості.
Схема
регулятора представлена на рис.4.
а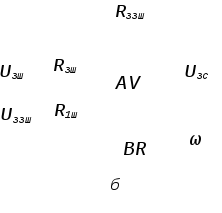
Рис.4. Регулятор швидкості
а) структурна схема; б) принципова схема
Передавальна функція розімкненого оптимізованого контуру швидкості (див.рис.4,а), що налагоджений на симетричний оптимум буде:
 (78)
(78)
Передавальна функція об’єкта регулювання швидкості має вигляд:
 (79)
(79)
У контурі швидкості нескомпенсованою постійного часу є величина:
 (80)
(80)
Передавальна функція пропорційного регулятора швидкості буде:
 (81)
(81)
Приймаэмо
напругу завдання
 ,
тоді передавальний коефіцієнт зворотнього
зв’язку по швидкості буде:
,
тоді передавальний коефіцієнт зворотнього
зв’язку по швидкості буде:
 (82)
(82)
 (83)
(83)
Коефіцієнт підсилення регулятора швидкості знаходиться як:
 (84)
(84)
 (85)
(85)
Слід визначити параметри регулятора швидкості (див.рис.4,б), ураховуючи навантажувальну здатність задатчика інтенсивності, виконаного на базі напівпровідникового підсилювача.
Прийнявши
 отримаємо:
отримаємо:
 (86)
(86)
 (87)
(87)
Опір у ланцюгу зворотного зв’язку за швидкості знайдеться як:
 (88)
(88)
 (89)
(89)
Розрахункова схема двоконтурної системи підпорядкованого регулювання параметрів (швидкості та струму) подана на рис.5.
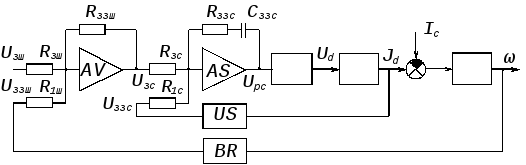
Рис.5.
Розрахункова схема двоконтурної системи
підпорядкованого регулювання параметрів
(швидкості та струму)
Статичне падіння швидкості в спроектованому електроприводі при номінальному навантаженні буде:
 (90)
(90)
 (91)
(91)
При необхідності отримання електромеханічної характеристики з меншим статичним падінням швидкості (більшої жорсткості) можна використати ПІ–регулятор швидкості. Якщо треба отримати регулятор швидкості з регульованою жорсткістю, то необхідно шунтувати ємність резистором в його ланцюзі зворотного зв’язку.
Висновки
На базі уніфікованого БТУ 3601 розраховані параметри регуляторів системи керування схеми підпорядкованого керування електроприводом. Величина цих параметрів визначається постійними часу двигуна, тиристорного перетворювача, які в свою чергу обумовлені величинами індуктивностей в обмотках збудження, активними опорами у ДПС, та параметрами підпорядкованого контуру.
Дана система у динамічному режимі забезпечує низький рівень перерегулювання, малий час перехідного процесу, задовільну швидкодію. В усталеному режимі система має статизм: у контурі швидкості наявна статична похибка за збурюючою дією, тому жорсткість механічної характеристики не достатня. Регулятори зібрані на базі уніфікованих операційних підсилювачів з ввімкненими у ланцюг зворотнього зв’язку пропорційними чи інтегруючими ланками, що полегшує настроювання, швидкість монтажу, простоту реалізації.
На основі цих переваг система підпорядкованого регулювання є оптимальною для керування електроприводом середньої потужності.