

Лекция 7. Кинематика манипулятора. Прямая и обратная задача. Геометрия рабочего пространства.
7.1 Общие сведения о кинематике манипуляторов.
В процессе изучения кинематических свойств многозвенных механизмов возникает необходимость описания движения их звеньев без учета их масс и действующих на них сил. На практике конструкция манипуляторов чаще всего представляет собой сочетание N звеньев, объединенных в кинематическую цепь посредством кинематических пар 5-го класса, которые характеризуются одной степенью свободы. Тогда положение 6-го звена относительно ( I - 1)-ого звена манипулятора может быть описано через обобщенный параметр:
![]()
где σi - показатель i-й кинематической пары; для вращательной пары σi =1 и для поступательной пары σi =0.
αi - угол поворота i - го звена манипулятора относительно ( i -1)-го звена при наличии вращательной кинематической пары;
Si- относительное поступательное перемещение i-го звена относительно (i-1)-го звена при наличии поступательной кинема- тической пары.
В процессе анализа кинематической цепи манипулятора определение взаимного положения его звеньев сводится к задаче преобразования одной системы координат в другую. Такое преобразование удобно выполнять с помощью одной или произведения нескольких специальных матриц размерностью 4x4, которые носят наименование матриц винтовых смещений:
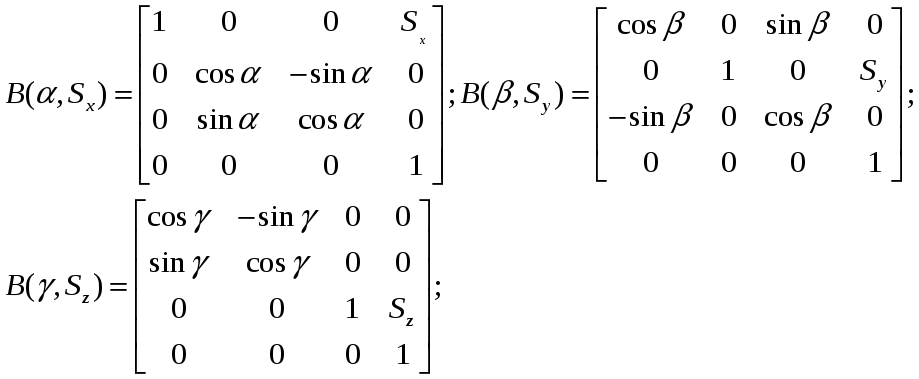
где B - условное обозначение матрицы винтового смещения, основными параметрами которой являются угловое и линейное перемещения;
- углы поворота звена относительно одной из осей X, Y или Z соответствующей системы координат;
Sx , Sy , Sz - линейные смещения вдоль осей X , Y или Z.
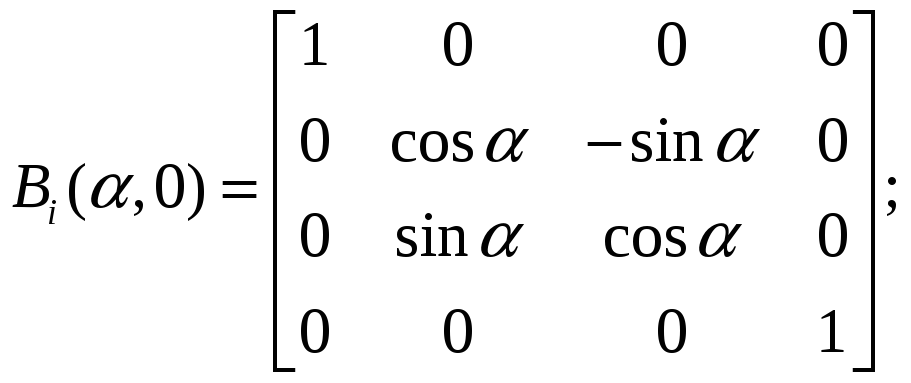
Одной из важнейших особенностей этих матриц является их универсальность, т.к. каждая из них предполагает наличие вращения на определенный угол вокруг соответствующей оси (X , Y или Z) и поступательный перенос вдоль одной ив осей системы координат. При наличии только одного параметра, например, углового перемещения α вокруг оси X первая матрица винтового смещения преобразуется к виду ( Sx =0):
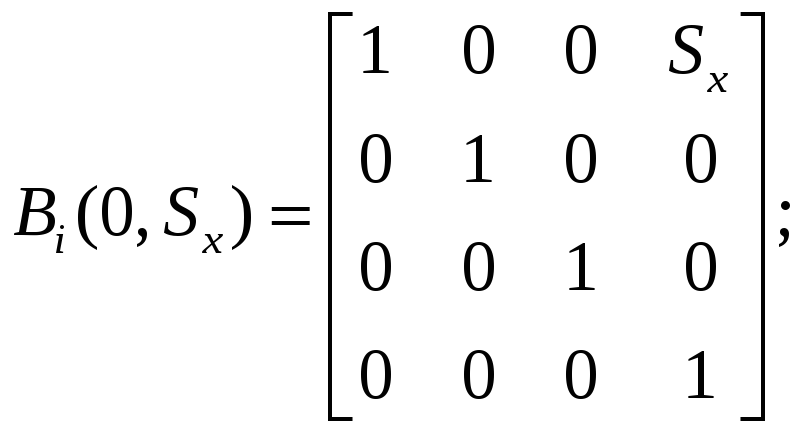
При наличии только поступательного перемещения вдоль оси эта
же матрица преобразуется к виду:
Результирующая матрица перехода Ai(qi) между системами координат двух соседних звеньев общем виде может быть записана в виде:
Ai(qi) = B(αi, 0) · B(0, Si),
при этом следует отметить, что вращательное и поступательное движения могут быть связаны с различными осями координат.
Представленные матрицы ( I) есть матрицы перехода от i- й системы координат, связанной с i-м звеном, к ( i-1)- й системе координат ( i-I)-гo звена:
![]()
где
![]() - радиус-вектор точки пространства в
системе координат (i-1)
и i
соответственно.
- радиус-вектор точки пространства в
системе координат (i-1)
и i
соответственно.
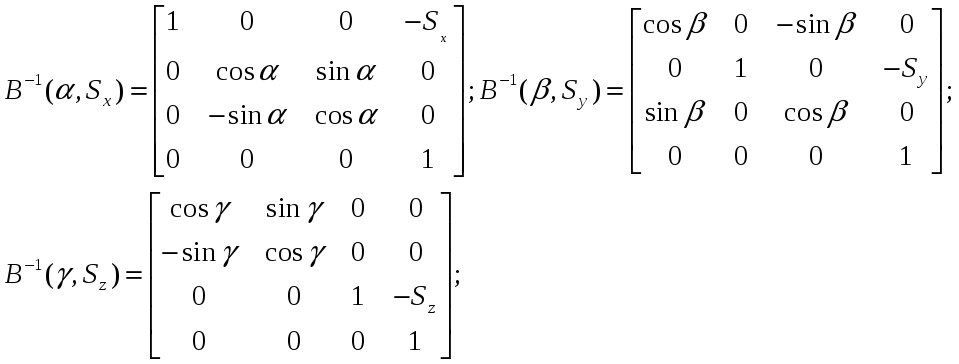
Обратный переход от (i-1)-й системы координат к i- й системе координат записывается в виде:
![]()
где
![]() -
обратная результирующая матрица, которая
определяется с помощью обратных матриц
-
обратная результирующая матрица, которая
определяется с помощью обратных матриц
![]() :
:
Представленные матрицы перехода являются одним из вариантом матриц перехода с использованием однородных систем координат.
Предложенный вариант прост, универсален и не требует соблюдения специальных правил при выборе осей координат (при рассмотрении однородных систем координат выбор осей координат осуществляется в строгом соответствии с правилами. •
Прямая
задача
кинематики многозвенных механизмов
состоит в следующем: необходимо найти
матрицу
![]() (радиус-вектор), которая определяет
координаты захватного устройства
манипуляторе в пространстве
относительно некоторой неподвижной
системы координат (чаще всего она связана
с неподвижной базой манипулятора), зная
конструктивные параметры манипулятора
и значения обобщенных параметров qi
для
всех его кинематических пар. Кроме
координат захватного устройства
манипулятора необходимо определить
его пространственную ориентацию.
(радиус-вектор), которая определяет
координаты захватного устройства
манипуляторе в пространстве
относительно некоторой неподвижной
системы координат (чаще всего она связана
с неподвижной базой манипулятора), зная
конструктивные параметры манипулятора
и значения обобщенных параметров qi
для
всех его кинематических пар. Кроме
координат захватного устройства
манипулятора необходимо определить
его пространственную ориентацию.
Решением прямой задачи кинематики манипулятора с N звеньями являются выражения:
![]()
где Аi- связь i-й системы координат звена с ( i -1)-й системой координат с учетом наличия либо вращательной, либо поступательной пары, либо их комбинации.